
Fターム[2C014BB02]の内容
武器;爆破 (1,267) | 機能 (26) | 電子制御手段によるもの (23) | 電磁波利用の目標設定手段を有するもの (9)
Fターム[2C014BB02]に分類される特許
1 - 9 / 9
弾着観測装置
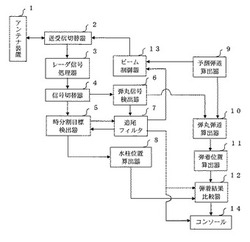
【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
(もっと読む)
火力配分装置

【課題】撃墜確率、予測会合時間、初弾発射待ち時間、最終弾発射限界時間を考慮し、目標撃墜完了までの目標撃墜所要予測時間を算出し、高脅威度目標順に、有効度が高い火器の割当て、高脅威目標の優先的対処、目標の対処率向上、より遠方での目標撃墜、使用弾数削減を課題とする。
【解決手段】現時刻に初弾発射待ち時間を加算した予測時刻の予測目標状態から各火器の撃墜確率と会合時間を算出、撃墜確率が閾値を超えていたら撃墜完了とし、目標撃墜所要予測時間を火器の有効度とし、撃墜確率が閾値以下で、かつ最終射撃限界時間内であれば、目標撃墜所要予測時間を新予測時刻とし、新予測時刻おける目標状態を予測し、予測会合時間と撃墜確率を算出、撃墜確率が閾値以上になるか、新予測時刻が最終射撃限界時間を超えるまで同処理を繰り返し、最終の目標撃墜所要予測時間を火器有効度として、火力配分を行う。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
レーザ照準スポット識別方法及び装置
【課題】特定の小火器に関連するレーザ照準スポットを他のレーザ照準スポットと区別するシステム及び方法を開示する。
【解決手段】レーザ照準スポットを、レーザ照準スポット及び他のレーザ照準スポットを含む視界を撮像し、撮像した視界内の特定の小火器に関連したレーザ照準スポットを識別し、識別したレーザ照準スポットを他のレーザ照準スポットと区別するために撮像した視界を変更し、変更された撮像した視界を表示することによって識別することができる。
(もっと読む)
レーザ照準装置
【課題】移動体に搭載して遠隔操作される小火器に装着するレーザ照準装置であって、装置構造が簡単であると共に、操作者の熟練度に関係なく正確な射撃を行うことができるレーザ照準装置を提供する。
【解決手段】移動体Vに搭載した小火器Wに装着するレーザ照準装置であって、目標Tに向けてレーザ光を照射するレーザ発振器1と、目標Tを撮像する固定焦点カメラ2と、画像3Aを表示する表示部3と、画像3A上に目標マーカMを表示するための制御部4を備え、制御部4が、レーザ照準点Aを特定する照準点特定手段41と、レーザ発振器1からレーザ照準点Aまでの目標間距離R1を検出する距離検出手段42と、レーザ照準点Aの位置及び目標間距離R1に基づいて目標マーカMの表示位置を決定する表示位置決定手段43を備えた構成とすることで、装置構造が簡単であると共に、操作者の熟練度に関係なく正確な射撃を行えるようにした。
(もっと読む)
受動光ロケータ
【課題】 ターゲットに関連する絶対位置を示す情報を生成する受動光ロケータと、遠隔操作アクチュエータとを具備するシステムを提供する。
【解決手段】受動光ロケータ32は、ターゲット50までの距離を示す情報を生成する受動光レンジファインダ85と、当該受動光レンジファインダの光軸の方位角及び仰角を示す情報を生成する少なくとも1つのセンサ60とを備える。受動光ロケータは、当該受動光ロケータに関連する地理的位置を示す情報と、ターゲットまでの距離を示す情報と、光軸の方位角及び仰角を示す情報とを使用して、ターゲットに関連する絶対位置を示す情報を決定する。遠隔操作アクチュエータ200は、受動光ロケータに機械的に結合され、当該システムにおいて受け取られる1つ又は複数の動作命令に従って受動光ロケータの光軸を遠隔に位置決めする。
(もっと読む)
目標位置照準装置および目標位置照準方法
【課題】航空機の飛行中にタレット本体の表面に受ける外力や空力の影響を低減させることにより、目標位置照準装置として性能劣化を極力防止する目標位置照準装置および目標位置照準方法を提供すること。
【解決手段】目標位置照準装置10は、内部に光学系機器が収納され、目標物側から照射される赤外光a1を受光するタレット12と、当該タレット12の光学系機器24を経由して導出された赤外光a1を入射して画像データ信号a2を生成するタレットと離間して設けられた赤外線撮像器13と、画像データ信号a2を入力して、画像データ信号a2に含まれる目標物Tの位置データを補正する補正データ信号a3を生成する画像処理装置14と、補正データ信号a3を入力し、タレット12の向きを補正する補正信号a41およびa42を生成し、タレット12側に出力して、タレット12の向きを補正するタレット駆動装置19とを備える。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
飛翔体追尾方法及び飛翔体追尾装置
【課題】 自機に向かって飛来するミサイルなどの飛翔体を発射後の早い時期に探知し、継続的に追尾することが可能な飛翔体追尾方法及び飛翔体追尾装置を得る。
【解決手段】 紫外線センサを設け、自機に向かって飛来するミサイルなどの飛翔体を、この飛翔体のプルームが発する紫外線を検出することにより、パッシブな手法でかつ早期に初期探知する。また、初期探知した飛翔体の赤外線画像を撮像して飛翔体のテール部を抽出後、このテール部から飛翔体の進行方向にレーザビーム光を照射することによって飛翔体のシーカ搭載位置を捕捉し、これを照準点としてレーザビーム光による飛翔体の追尾を継続する。
(もっと読む)
1 - 9 / 9
[ Back to top ]