
Fターム[2C032HC17]の内容
教示用装置 (70,585) | 間接表示媒体の利用機器 (31,099) | 操作 (7,754) | 自動、周囲の雰囲気検知 (39)
Fターム[2C032HC17]に分類される特許
1 - 20 / 39
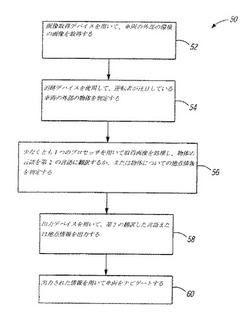
運転者が注目している外部の物体に関する情報を提供するための車両システムおよび方法
【課題】車両の運転者に情報を提供するためのシステムおよび方法を提供する。
【解決手段】画像取得デバイス、頭部または視線追跡装置、少なくとも1つのプロセッサ、および出力デバイスを有する、車両の運転者に情報を提供するためのシステムおよび方法。画像取得デバイスは、車両の外部の環境の画像を取得する。頭部または視線追跡装置は、車両の運転者が視認している物体を判定する。少なくとも1つのプロセッサは、取得画像を処理する。また、少なくとも1つのプロセッサは、運転者が視認している物体の取得画像に含まれる言語を第2の言語に翻訳するか、または運転者が視認している物体の取得画像に基づいて地点情報を判定する。出力デバイスは、運転者が視認している物体の取得画像の翻訳された第2の言語を含むか、または運転者が視認している物体の取得画像に基づいて判定された地点情報を含む情報を出力する。
(もっと読む)
携帯型地図表示装置及びその表示制御方法

【課題】携帯端末での画面表示方向に応じてユーザーの認識に合致する地図表示を行なう携帯型地図表示装置及びその表示制御方法を提供する。
【解決手段】表示部に、地図を表示させる携帯型地図表示装置であって、前記表示部の所定方向を縦にした第1画面表示と、前記所定方向を横にした第2画面表示とを設定する設定部と、自装置の基準方向の向く方位角を取得する方位取得部と、前記設定部における設定に基づいて、前記方位角に一致する方向が前記表示部の表示上の上方向となるように前記地図を表示する制御部と、を備える。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
道案内情報のウィンドシールド表示装置及びその方法
【課題】
運転者が目的地と連係された道路を正確に認知できるようにする道案内情報のウィンドシールド表示装置及びその方法を提供する。
【解決手段】本発明に係る装置は、道案内情報のウィンドシールド表示装置において、運転者が設定した目的地までの道案内情報を獲得するナビゲーション連動手段、前方道路の映像を認識する前方映像認識手段、前記運転者の顔映像から目の位置を検出する目線位置検出手段、前記目線位置検出手段が検出した運転者の目線位置を基準に、ウィンドシールド上に実際道路と前記道案内情報をマッピングさせて表示するようにウィンドシールド表示手段を制御する制御手段、及び前記制御手段の制御に従い実際道路に道案内情報をマッピングさせて表示する前記ウィンドシールド表示手段を含むことを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】地図画面とメニュー画面の利便性に優れたナビゲーション装置を得る。
【解決手段】この発明に係るナビゲーション装置は、表示制御部は、操作入力部からの操作情報によりメニュー画面を表示するとき、経路探索部または自車位置特定部から得られる移動体の走行状態の情報を用いて地図画面またはメニュー画面の表示形態を決定し、走行状態の情報として、移動体の移動速度を用いて地図画面またはメニュー画面の表示面積を変更し、移動速度が所定値以下の場合には、移動速度が所定値を超える場合よりも地図画面の表示面積を小さくするものである。
(もっと読む)
交通信号マップ作成及び検出
システム及び方法が交通信号機の3Dロケーションを識別するマップを提供する。交通信号機の位置、ロケーション及び方位を2つ以上の画像から自動的に外挿することができる。そして、そのマップを用いて、ロボット車両又は運転者が交通信号540のロケーション及び状況を識別するのを支援することができる。 (もっと読む)
ナビゲーション装置、動作制御方法、およびコンピュータプログラム
【課題】乗員が、緊急時の状況に応じた適切な対応をとることを効果的に支援することができるようにする。
【解決手段】表示装置(例えば、画像表示装置61)の表示画面における地図上に移動体(例えば、車両)の現在位置を表示して移動体を目的地まで誘導するナビゲーション装置10であって、緊急時の状況に応じた対応方法を示す緊急時対応情報を記憶する緊急時対応情報記憶部F4を備え、移動体の乗員が置かれた状況を判定し(例えば、判定要素による状況項目の特定)、判定された状況(例えば、状況項目)に合致する緊急時対応情報を検索し、検索された緊急時対応情報を出力する
(もっと読む)
制限速度案内装置、ナビゲーションシステム、制限速度案内方法、制限速度案内を行うためのコンピュータプログラム及びそのコンピュータプログラムを記録した記録媒体
【課題】無意識の制限速度オーバーを未然に防止する。
【解決手段】少なくとも制限速度に関する道路情報を保存する道路情報保存部14と、案内される経路上において自車位置を特定する自車位置特定部8と、自車の現在走行速度SPを特定する現在走行速度特定部9と、経路の進行方向先方にある道路の制限速度としての第1の制限速度S2を前記道路情報保存部14から読み出して、現在走行速度SPと比較する速度比較部225と、前記第1の制限速度S2が現在走行速度SPより遅いとき、案内信号を出力する。
(もっと読む)
ナビゲーション装置
【課題】
本発明では、運転者の視線に応じた分かり易い交差点の案内を行うことができると共に、交差点の映像を全表示するナビゲーション装置と比べて、画面に表示させる情報量を低減させることができるナビゲーション装置を提供することを目的とする。
【解決手段】
本発明に係るナビゲーション装置は、車両を運転する運転者に対して、該車両の進行方向にある交差点周辺に関する施設情報に基づき前記交差点における案内を行うナビゲーション装置であって、運転者の視線の方向を検出する視線方向検出手段と、視線方向検出手段により検出された視線の方向と施設情報とに基づき、運転者が注目する施設を特定する注目施設特定手段と、注目施設特定手段により特定された施設に関する情報を用いて、交差点における案内を行う交差点案内手段と、を有することを特徴とする。
(もっと読む)
経路案内システム、経路案内装置、経路案内方法、及び経路案内プログラム
【課題】複数の案内情報を容易に取得することが可能となる、経路案内システム、経路案内装置、経路案内方法、及び経路案内プログラムを提供すること。
【解決手段】ナビゲーション装置2は、出発地から目的地に至る経路を探索する経路探索部270と、経路探索部270にて探索された経路に沿って利用者を出発地から目的地に案内するための複数の案内情報を取得する案内情報取得部271と、案内情報取得部271にて取得された複数の案内情報を表示する表示部23と、案内情報取得部271にて取得された複数の案内情報が携帯電話にて撮影可能となるように、複数の案内情報を切替える表示切替部272を備える。
(もっと読む)
道路形状推定装置、道路形状推定方法及びプログラム
【課題】道路形状を正確に推定することができるようにする。
【解決手段】道路に沿って設定され、道路の形状を表す複数の形状補間点の補間点データを取得するデータ取得処理手段と、前記道路における所定の区間内の前記補間点データに基づいて各形状補間点における曲率半径を算出する半径算出処理手段と、前記各曲率半径に基づいて前記区間内のコーナを検出するコーナ検出処理手段と、検出されたコーナ内において閾値以上の曲率半径を有する形状補間点でコーナの分割を行うコーナ分割処理手段とを有する。前記閾値は、前記検出されたコーナ内の各形状補間点における曲率半径の平均値に対応させて設定される。閾値以上の曲率半径を有する形状補間点でコーナの分割が行われるので、道路形状を正確に推定することができる。
(もっと読む)
車両用ナビゲーション装置
【課題】車両が路面凍結によりスリップせずに走行できるように経路案内を行なうこと。
【解決手段】自車両の現在位置を特定する現在位置特定手段と、ユーザーによる目的地入力を受け付け可能な入力受付手段と、地図データが格納された記憶媒体と、前記現在位置特定手段により特定された自車両の現在位置から前記入力受付手段に対して入力された目的地に至る推奨経路を、前記地図データを参照して生成する推奨経路生成手段と、を備える車両用ナビゲーション装置であって、前記地図データは、道路に対応付けられた凍結防止設備の有無に関するデータを含み、前記推奨経路生成案内手段は、道路凍結が予測される所定の場合は、前記凍結防止設備を有する道路を優先して前記推奨経路を生成する手段である、車両用ナビゲーション装置。
(もっと読む)
地図情報作成装置及び車両の操作特性変更システム
【課題】拡張性・保守性に優れ、記憶容量が小さい地図情報を作成できる地図情報作成装置、及び車両の操作特性変更システムを提供すること。
【解決手段】車両を運転するドライバのドライバ操作の変化を検出するドライバ操作変化検出手段4、7と、前記ドライバ操作変化検出手段4、7が前記ドライバ操作の変化を検出したときに、前記車両の位置情報を取得する位置情報取得手段8と、前記ドライバ操作の変化と、そのドライバ操作の変化があったときの前記位置情報とを関連づけて記憶する地図情報作成手段6と、を備えることを特徴とする地図情報作成装置。
(もっと読む)
潜在危険地点検出装置および車載危険地点通知装置
【課題】道路上の潜在的危険地点を検出する。
【解決手段】センタが、車両の走行上の危険事態が発生した複数の危険発生地点のそれぞれについて、当該危険事態の種別を示す危険種別情報をヒヤリハットマップDBから取得し(405)、当該危険発生地点上の道路走行に影響を及ぼす道路属性情報を地図DB32aから取得する(410)。そしてセンタは、取得したこれら複数の道路属性情報について、危険種別情報等の組が同じもの毎に頻度分布統計をとり(ステップ415、図13、図14参照)、その統計に基づいて、危険種別情報等の組毎に道路環境の代表的特徴を特定する(430)。さらにセンタ3は、地図DBを検索して、特定した複数の代表的特徴のいずれかに合致する地点を、潜在危険地点として抽出する。
(もっと読む)
ナビゲーション装置
【課題】地図上に施設を示すアイコンを表示する場合において、その施設への到達可能性について、より簡便かつ明瞭にユーザに知らせる技術を提供する。
【解決手段】地図上に施設を示すアイコンを表示するナビゲーション装置であって、地図上の施設の位置を記憶する記憶手段と、燃料残量を取得する手段と、燃料残量から予想到達距離を求める手段と、現在位置からの距離が前記予想到達距離より遠い施設ほど、そのアイコンを薄く表示するアイコン表示手段とを備える。さらに、施設の営業終了時刻を取得する手段と、施設までの予想到達時刻を求める手段と、を備えてもよい。そして、表示手段は、予想到達時刻が営業終了時刻より遅い施設ほど、そのアイコンの色を薄くして表示してもよい。
(もっと読む)
画像処理装置および表示画像生成方法
【課題】 周囲の環境に関係なく、視認性の優れた画像処理装置および表示画像を生成するための表示画像生成方法を提供する。
【解決手段】 光センサ部11によって検出される外光の光強度に対応する地図画像情報が、画像情報選択部18aによって選択され、この選択された地図画像情報に対応し、かつ重畳すべき重畳情報が、重畳情報決定部18bによって決定される。画像情報選択部18aによって選択された地図画像情報と、重畳情報決定部18bによって決定された重畳情報とを重畳した重畳画像情報が、処理部18によって生成されて表示部16の表示画面に表示される。
(もっと読む)
ナビゲーション装置、及びナビゲーションプログラム
【課題】ユーザから遠い側の表示を見やすくする。
【解決手段】図1(a)は、ディスプレイ42を中央から標準領域61と拡大領域62の2つに区分した場合を示している。ユーザ位置60は、ディスプレイ42に対して斜めの位置に存在し、標準領域61は、ユーザ位置60に近い側に形成され、拡大領域62はユーザから遠い側に形成されている。ナビゲーション装置は、ディスプレイ42に案内情報を表示する際に、標準領域61に表示するものに関しては標準の倍率で表示し、拡大領域62に表示するものに関しては拡大表示する。このように、ユーザ位置60から遠い側の表示が拡大されるため、ユーザにとって、ディスプレイ42の遠い側の案内情報が見やすくなる。
(もっと読む)
ナビゲーション装置、サーバ、及びナビゲーションプログラム
【課題】走行経路を適切に設定する。
【解決手段】ナビゲーション装置は、目的地の入力を受け付けると、ノードデータを用いて走行経路を探索し、当該走行経路を案内する。ナビゲーション装置は、走行経路を案内している過程で、車両が経路の分岐点で案内した走行経路に進行しようとして中止したことを検出する。このように、一端進行しようとして中止したということは、当該走行経路が進入禁止であったためと考えられるため、ナビゲーション装置は、当該走行経路に対応するリンクに進入禁止の属性を付与してノードデータを更新する。このようなノードデータの更新内容は、次回からの走行経路の探索に反映され、ナビゲーション装置は、より適切な走行経路を案内することができるようになる。
(もっと読む)
経路案内装置
【課題】矢印の示す進行方向を運転者が容易に把握することを可能にする経路案内装置を提供
【解決手段】図は、図(a)→(b)→(c)→(d)→(e)の順で時間が経過している場合の矢印YJ1の表示を示す。図(a)に示す状態では、車両の現在地と直近の案内ポイントとの間の距離(以下、案内ポイント・車両間距離という)が所定距離(例えば、700m)以上であるので、矢印の表示を行っていない。その後に図(b)に示す状態になると、案内ポイント・車両間距離が所定距離未満となるため、矢印YJ1の表示を開始し、図3(b)〜(e)に示す矢印YJの表示を繰り返す。矢印YJ1は、車両の現在地を始点B1(図(b)を参照)とし、走行経路Rに沿って矢印終点距離(例えば、900m)先の終点E1(図(e)を参照)に向かって矢尻YEが移動するとともに矢尻YEから現在地まで続く線分を有する矢印である。
(もっと読む)
車両挙動学習装置及び車両挙動学習プログラム
【課題】特定の位置において検出される自車両の挙動を高精度に学習することが可能な車両挙動学習装置及び車両挙動学習プログラムを提供する。
【解決手段】挙動検出手段により検出された自車両Cの挙動と、当該挙動の検出より前に画像認識手段により認識された対象地物f1との関係を表す関係情報Brを取得し、前記挙動検出手段により検出された自車両Cの挙動の属性を表す挙動属性情報Baと、当該挙動について取得された関係情報Brとを含む検出挙動情報Bを検出挙動記憶手段に記憶し、前記検出挙動記憶手段に記憶された記検出挙動情報Bに基づいて、対象地物と関係付けられた自車両の挙動の学習結果を表す学習挙動情報Sを生成する。
(もっと読む)
1 - 20 / 39
[ Back to top ]