
Fターム[2C150DA01]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857)
Fターム[2C150DA01]の下位に属するFターム
歩行するもの (190)
走行するもの (335)
くねくね移動又はのたうつ (7)
逆さで移動 (1)
追動 (2)
軌条又は索条を移動 (45)
空中を飛翔 (148)
空中を浮遊 (64)
水上又は水中での移動 (57)
Fターム[2C150DA01]に分類される特許
1 - 8 / 8
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
容易に、身体運動と回転の協調を楽しむことのできる独楽

【課題】 安全に、かつ、容易に身体運動と回転の協調を楽しむことのできる独楽を提供する。
【解決手段】 中空の独楽(1)に磁性を有する軸(2)と風穴(3)を設け、それを回転させるレールとして、平行に並べた2つの楕円形の鉄の細い棒(4)を用いたことを特徴とする。
(もっと読む)
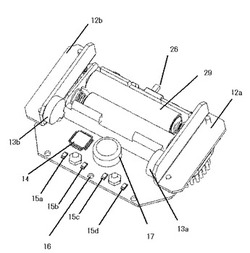
振動移動装置
【課題】 ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供する。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
(もっと読む)
ロボット
【課題】 ロボットとの対話時に、ユーザがメモとして記録しておきたい部分を自動的に記録し、ユーザがロボットとの対話時に発する音声を基にメモを自動的に再生することにより物忘れ防止が可能なロボットの提供
【解決手段】 ロボットとモニタ対象者の対話中にメモ処理部31は、対話処理部24から正規化されたモニタ対象者の入力音声を取得する。メモ登録処理部31−1は入力音声と登録用キーワードが一致するとそれに続く音声をメモ音声としてメモ音声登録メモリに登録する。また、メモ再生処理部31−2は、入力音声が再生用キーワードと一致するとメモ音声を再生する。また、入力音声が停止用キーワードと一致するとメモ音声再生を停止する。
(もっと読む)
ロボット用触覚センサ装置
【課題】弱く接触しても検知することができるとともに、センサをロボットのカバーに取り付けることができることを可能にする。
【解決手段】ロボット40の本体の周囲を覆うカバー50を振動させるアクチュエータ4と、カバーに取り付けられカバーの振動を検出するセンサ5と、アクチュエータを一定の条件で振動をするよう制御する振動制御部3と、アクチュエータにより与えた振動とセンサにより検出された振動とを比較しカバーへの接触の有無を検出する接触検出部2と、を備えている。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10は、スピーカ54、マイク56および眼カメラ60を含み、たとえば、或る会社など、噂が発生し流される場所に配置される。人間14は、たとえば気になる噂があると、端末106からネットワーク100を介してサーバ102にアクセスし、噂登録掲示板を介して当該噂を登録する。当該噂は、噂DB104に記憶(登録)される。コミュニケーションロボット10は、噂DB104から噂を読み出し、当該噂に含まれる情報に基づいて自律移動し、当該噂の検証情報をカメラ60やマイク56を用いて取得する。たとえば、コミュニケーションロボット10が配置された場所に存在する各人間12に所持等させた無線タグ16からの識別情報と噂に含まれる情報とに基づいて噂の当事者12を特定し、当該当事者12に対して噂に関する取材を行う。取材等によって取得した噂の検証情報は、サーバ102に送信され、噂DB104に登録される。登録された当該検証情報は、たとえば噂検証結果掲示板を介して人間14等に開示される。
【効果】 噂に基づく人間の不安や疑問を解消させ、また好奇心を満足させることができる。
(もっと読む)
コミュニケーションロボット
【課題】より生物らしい反応行動を実行するロボットを提供する。
【解決手段】ロボットとそのロボットおよび協働する人間の各部位の3次元位置座標に基づいて、人間が一定距離以内にロボットに接近しているかどうか判断したとき、ステップS45で、人間の手とロボットの各タッチセンサとの間の距離Dlh(n),Drh(n)を検出し、その距離が所定の接近距離L以内でかつ最も小さいロボットの部位(タッチセンサ)Tlh,Trhを検出する。Tlh,Trhが両方とも「0」でないときには、CPUは、人間の視線方向に基づいて推定接触部位Teを特定または推定する。ただし、視線方向と推定接触部位とが一致しないときには、距離Dlh(n)およびDrh(n)の小さい方を推定接触部位Teとして特定する。
(もっと読む)
転回移動玩具
【課題】緩急のある興趣性に富んだ転回動作を行なうことができる転回移動玩具を提供する。
【解決手段】内部に左右方向に蛇行する重錘球転動路4が設けられた胴体1と、胴体1の頭側の腕枢支部10に枢支された左右の腕体11と、胴体1の尻側の脚枢支部20に枢支された左右の脚体21と、胴体1の重錘球転動路4内に転がり移動可能に収容された重錘球7とを備えた。
(もっと読む)
1 - 8 / 8
[ Back to top ]