
Fターム[2C150DA02]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857) | 歩行するもの (190)
Fターム[2C150DA02]の下位に属するFターム
Fターム[2C150DA02]に分類される特許
21 - 30 / 30
ロボットシステム
【課題】回線の切断を検知し、回線の切断をユーザに対して速やかに通知することのできるロボットシステムを提供することを目的とする。
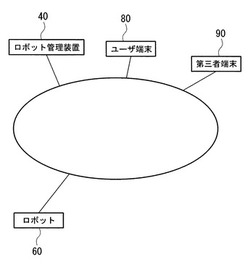
【解決手段】ユーザ端末、第三者端末、およびロボットとネットワークを介して接続されるロボット管理装置であって、ロボットからサービス種別および該サービスの終了予定時刻が対応付けられて登録されたスケジュール情報を受信する通信装置と、受信したスケジュール情報を記憶する記憶装置と、スケジュール情報に登録された終了予定時刻に対し所定の時間を経過しても、サービスに関する情報をロボットから受信しなかった場合に、ユーザ端末および第三者端末の少なくともいずれかに、ネットワークが不調である旨を通知する電子メールを作成する電子メール作成部とを具備するロボット管理装置を提供する。
(もっと読む)
歩行ロボット用付加装置および歩行ロボット

【課題】2足歩行型の人型ロボットの姿勢維持に伴う高負荷状態を緩和し、且つ2足歩行型の人型ロボットの優位性も生かすことができる技術を提供することを目的とする。
【解決手段】2足歩行が可能な人型ロボット100の下半身胴体部102の背面に人型ロボット100と同様な下半身を備えた歩行ロボット用付加装置200を着脱可能とする。2足歩行が生かせる状況では、歩行ロボット用付加装置200を取り外して人型ロボットとして稼働させ、4足歩行で構わない状況においては、歩行ロボット用付加装置200を装着して、4足歩行型の移動ロボットとする。2つの態様を状況に応じて使い分けることで、人型ロボット100の汎用性を高めることができる。
(もっと読む)
足部安全機構及びそれを備えた2足歩行ロボット並びにその制御構造
【課題】既存の2足歩行ロボット等の足底に容易に取付けることができ、歩行時には通常の足底として使用することができると共に、緊急時には支持多角形を拡大して広い姿勢安定領域を確保でき、転倒を防止して各部の動作を緊急停止することができる信頼性に優れる足部安全機構を提供することを目的とする。
【解決手段】歩行ロボットの足底に配設される基部と、基部に回動自在又は伸縮自在に配設され転倒防止動作時に基部の外方に突出するアーム部と、を備えている。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 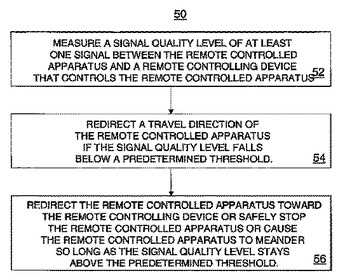 (もっと読む)
(もっと読む)
アドオン装置へのインターフェイスに関する方法及びシステム
子供の玩具として実施化されることが可能である方法及びシステム10が記載される。当該システム10は、システム10によってホストされる相互作用的な環境へアドオン装置20a又はストーリをインターフェイスするように動作可能である。システム10は、システム10へ導入されたアドオン装置から通知225を受信するように動作可能である応答エンジン30を有する。応答エンジンは、アドオン装置20aへのチャレンジ235を生成するように動作可能であり、前記チャレンジは、埋め込まれた透かしを含む。応答エンジン30は、アドオン装置20aからチャレンジ235に応答して送信された対応する応答を受信するように動作可能である。更に、応答エンジン30は、アドオン装置20aが前記対応する応答を生成する際にチャレンジ235から正確に透かしを抽出することが可能であるか否かを決定するために、前記対応する応答を分析するように更に動作可能である。当該システム10は、これにより、システム10へ新しい装置20aを受け入れることが選択的に可能であり、これにより、システム10を用いて使用される偽造品又は複製品を防ぐことが可能である。 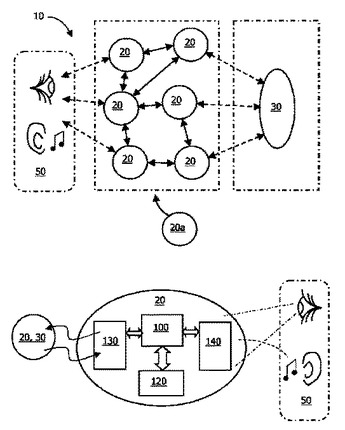 (もっと読む)
(もっと読む)
綱渡り玩具
【課題】猿などの動物、人形が蔦などの綱にぶら下りながら綱を手繰るようにして渡る動作を呈し、興趣が深い綱渡り玩具を提供する
【解決手段】玩具体1は、前後方向に回動可能な左右腕体26,27及び左右脚体32,33と、左右腕体26,27及び左右脚体32,33を左右交互に前後方向に回動する作動機構及び作動機構を駆動させる駆動機構とを有している。左右腕体26,27及び左右脚体32,33の係合部が棒状体45に係合して玩具体1がぶら下がった状態で作動機構が左右腕体26,27及び左右脚体32,33を前後方向に反復回動作動させ、玩具体1が棒状体45に沿って移動し、綱渡りの動作を呈する。
(もっと読む)
動作玩具
【課題】車輪の回転動力を利用した動作玩具であって、車輪の回転・停止の際に被駆動体を動作させる動作玩具を提供すること。
【解決手段】車輪と、前記車輪の回転動力を動力源として動作する被駆動体と、前記車輪の回転動力を前記被駆動体に伝達する動力伝達機構と、前記動力伝達機構の構成部品の1つであって前記車輪が回転する際に前記動力伝達機構の他の構成部品同士を連結させて前記車輪の回転動力を前記被駆動体に伝達させるクラッチと、前記車輪の回転が停止する際に前記クラッチによって前記動力伝達機構の他の構成部品同士の連結が解除された場合に前記被駆動体を初期位置に復帰させる付勢手段とを備えることを特徴とする。
(もっと読む)
ロボット装置の制御システム及び制御方法
【課題】 複数台のロボットが協調的に動作し、全体としてある特定の目的を実現するマルチロボット・システムに関する。
【解決手段】 マルチロボット・システムは、舞台上で活動する複数のロボットと、舞台上のロボットの動作を監視するモニタ・システムと、マルチロボットの運用を行なう統括コントローラで構成される。統括コントローラは、ロボットの状態と、モニタされた位置及び方向に基づいて、ロボットに対する動作指示や、ロボットに対する位置及び方向の補正指示、異常発生(若しくは予測)時におけるロボットへの動作指示を、無線LAN経由でリアルタイムに行なう。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
人造馬スリーファイブ
【目的】 ガスエンジンを搭載し自律性を持って多目的作業を遂行する機動馬の、その先駆けとなる人力馬スリーフアイブは、固有となる乗手の全体力と全機能の集中稼働と駆使を前提として、生馬の様に動かせるカラクリの道具であり、児童の遊び相手となり、問えば答える愛玩動物である。躍動して止まぬ青少年の肉体と精心を、日々の通学や競技の中で逞しく育成する事を目的とする。その手段において屋内外や道公園等に限定されない全野性の交通機関でもある。かつて人々が現在の馬に造り上げた優良な形質を保存する為にも、機動馬は生馬と仲良く頭を並べ、次代の野山を駆け、共に馬車や農機を曳いて、人と伴に働く事が、人造と生馬をより役立つものへと進歩させる絆となる。
【構成】 合理的効率第1の運動物体(動く物)の追求とは別の形で、生き物の形態と機能を、極力真似て生き物の様に動く物、人間が主体となってこれを動かし伴に働いて楽しく、生活に役立つ動物を構成する。
(もっと読む)
21 - 30 / 30
[ Back to top ]