
Fターム[2C150DA05]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 全体が移動する (857) | 歩行するもの (190) | 数対の足によるもの (31)
Fターム[2C150DA05]に分類される特許
1 - 20 / 31
移動玩具
【課題】安価で且つ変化に富む遊びができる移動玩具を提供すること。
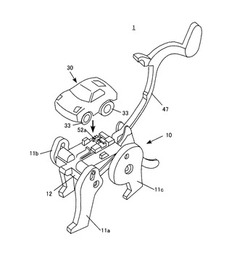
【解決手段】動力源を有しない第1の移動体10に、動力源31、及び、この動力源31の動力によって駆動される駆動輪33を有する第2の移動体30を搭載して固定することによって、第2の移動体30の動力源31を利用して、第1の移動体10を移動させるようにすることで、安価で且つ変化に富む遊びができる移動玩具を実現した。
(もっと読む)
脚式移動ロボット

【課題】足首部のコンパクト化が可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、下腿リンク34に設けられ、ピッチの方向に揺動可能な揺動部材52と、下端54aが揺動部材52の前端52bに連結された前側ロッド54と、上端56aが揺動部材52の後端52cに連結され、下端56bが足首関節の揺動軸線より後方にて足平22に連結された後側ロッド56と、前側ロッド54を駆動するアクチュエータ58と備える足首関節駆動機構50を有する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
振動モータ及び2列の脚部を有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物の本体部122と乗物の脚部との間には、空間、特にV字状の凹所があり、脚部は、正立回転中に内方に曲がる及び/または、脚部の列は、振動駆動部の回転軸の側部に位置する。 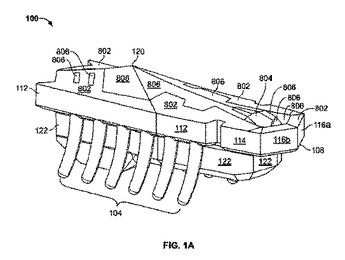 (もっと読む)
(もっと読む)
振動モータを有する乗物、特に自己正立する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物は、振動モータの回転トルク205の効果によって回転して自身で正立するように構成されている。これは、例えば、本体部のまたは乗物の重心502を振動モータ202、210の回転軸に近接してまたは回転軸上に位置付けるように構成することによって達成される。 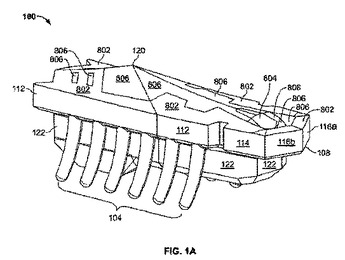 (もっと読む)
(もっと読む)
前方偏心ウェイトを有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。振動駆動部は、モータ210と、偏心ウェイト202と、を有し、偏心ウェイトは、前脚部104aの前方に配置されている。 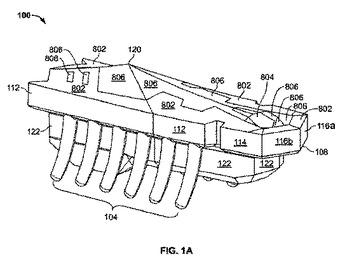 (もっと読む)
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 表現の豊富化を可能にするとともに、遷移する際の姿勢や動作が最適化されたロボット装置及び動作制御方法を提供する。
【解決手段】 ロボット装置1は、コントローラ32により、現在の姿勢から目標とされる姿勢又は目標とされる動作までの経路を、行動指令情報S16に基づいて、姿勢及び動作が登録されて構成され、姿勢とこの姿勢を遷移させる動作とを結んで構成されたグラフ上において探索し、探索結果に基づいて動作させて、現在の姿勢から目標とされる姿勢又は目標とされる動作に遷移させることにより、ロボット装置1やコンピュータグラフィックスで動くキャラクターの表現の豊富化が可能になる。
(もっと読む)
ロボット犬
【課題】 従来のペット型ロボットと同様に、情緒的な交流が可能であり、人間を心理的に楽しませる機能を有するとともに、さらに散歩、荷物の運搬機能を有し、特に荷物の持ち運びが困難な人に役立つロボットを提供する。
【解決手段】 四本の脚4a、4b、4c及び4dの下端にそれぞれモータ12a、12b、12c及び12dで駆動する走行輪13a、13b、13c及び13dが設けられ且つ四本の脚4a、4b、4c及び4dによって歩行可能に構成された犬型のロボットであり、背部には荷物格納部14が形成され、荷物の運搬時には前記四本の脚4a、4b、4c及び4dを安定位置に固定して、前記モータ12a、12b、12c及び12dの駆動により走行可能に構成されてなり、好ましくは、人の接近を検知する検知器18を有し、コントローラ22を首輪部20から延長したリード線21の端部に設けたことを特徴とするロボット犬。
(もっと読む)
歩行玩具
【課題】単に前足と後足とを動かして前進するだけではなく頭部を動かしながら歩行させることができるとともに、頭部を交換することにより頭部の動きが異なり、飽きのこない歩行玩具を提供すること。
【解決手段】頭部4を揺動させながら前足2と後足3とを前後に回動させて歩行する、以下の要件を備えることを特徴とする歩行玩具。
(イ)前記頭部4は玩具本体1に着脱可能であること
(ロ)玩具本体1には前足2と後足3とに設けた支軸12、16を回動可能に支持する軸受13、17を設けたこと
(ハ)上記前足2の支軸12は上記頭部を揺動駆動する駆動部材22が着脱可能に形成されていること
(ニ)上記前足2が回動すると上記支軸12に装着した駆動部材22は前足2と連動して回動すること
(ホ)上記駆動部材22は上記頭部4に係合し、前足2の回動に連動して頭部4を揺動させること
(もっと読む)
歩行玩具
【課題】構造が簡素で、かつ躍動感が得られる歩行玩具を提供すること。
【解決手段】玩具本体に少なくとも1組の左右の脚が設けられ、前記少なくとも1組の左右の脚が互いに連結部材で連結されるとともに、該連結部材の左右方向の中央部に上下方向に延びる軸が立設され、該軸が前記玩具本体の固定部に支持されており、該軸の軸心を中心にして前記連結部材を回動させて前記少なくとも1組の左右の脚を交互に前後に動作させる脚動作手段を備える歩行玩具であって、前記脚動作手段は、前記連結部材の前記軸とは離れた位置で回り対偶をなしモータ動力又はゼンマイ動力によって揺動して該連結部材を前記軸の軸心を中心に回動させる揺動リンクを含んで構成され、前記少なくとも1組の左右の脚において、前記軸は、前記揺動リンクの揺動によって上下方向に対して傾き角が変化するように前記玩具本体に支持され、該左右の脚の足裏が交互に接地するように構成されている。
(もっと読む)
ペット型ロボット
【課題】散歩するペット型ロボットが共に散歩する人間から遠く離れてしまい交通の妨げとなったり、通行人の通行の障害にならないようにして、散歩する人間の足元近くに位置して共に散歩行動することのできるペット型ロボットを提供する。
【解決手段】通信部を介したユーザの指示に基づいた指示信号によるペットロボット本体の方向性、スピード調整および停止、並びにペットロボット本体が犬締結ヒモ程度の長さの範囲を越えることを示す信号を入力してペットロボット本体を一時停止させる制御を行う行動制御信号を生成させ、行動制御信号によって行動駆動部を駆動制御してペットロボット本体をユーザから犬締結ヒモ程度の範囲で散歩行動させる人工知能部を有する。
(もっと読む)
幼児用乗馬遊び具
子供用の乗用器具が、開示される。本発明の乗用器具は、ハンドル(111)および足載せ台(115)を有する本体(110)、および、本体内に設置されて、所定の距離だけ互いに離れて間隔を置かれる位置に垂直に配置される支持板(120)を含む。この乗用器具は、前部回転部材(330)、後部回転部材(340)、前ばね(350)、後ばね(351)および連結棒(310)を有する、動作ユニット(300)を更に含む。前部回転部材および後部回転部材は、それぞれインターロック軸(213)および(223)を有する。この乗用器具は、それぞれインターロック軸(213)および(223)に固定される、前脚(210)および後脚(220)を更に含む。一方向車輪組立体が、前脚および後脚の各々の下端に設けられている。
(もっと読む)
擬似ペット
【目的】擬似ペット同士が互いに自発的に交信・交流を行うことができる擬似ペットもしくは縫ぐるみ等のキャラクタ形態物を提供する。
【構成】ユーザーが連れて歩く擬似ペット(コンピュータを含み、電気的に作動する装置で、肉体に相当する部分を有するもの)であって、近傍のエリアにある他の擬似ペットに受信されるように、「擬似ペットによる所定の挨拶信号」を、無線で送信するための挨拶信号送信手段と、近傍のエリアにある他の擬似ペットから無線で送信された「擬似ペットによる所定の挨拶信号」を受信するための挨拶信号受信手段と、を含むことを特徴とする擬似ペットもしくは縫ぐるみ等のキャラクタ形態物である。
(もっと読む)
燃料電池搭載装置
【課題】電力を必要とする部位がアプリケーション構造内に分散して配置されている場合に、個々の部位毎に燃料電池の発電部を分散配置し、一つ一つの発電部の出力を小さく抑えた燃料電池搭載装置を提供する。
【解決手段】犬型ロボット91の各関節の近傍に発電部80a〜80jをそれぞれ配置し、各発電部80a〜80jがそれぞれの近傍に位置する駆動用モータに電力を供給する。全ての駆動用モータに一つの発電部から電力を供給する場合に比べ、発電部1個当たりに必要とされる出力を軽減することが可能となり、発電反応によって生じる熱や水の管理が容易となり、犬型ロボット91を安定して動作させることが可能となる。
(もっと読む)
装飾体可動装置
【課題】コンピュータに周辺機器を接続するUSB規格の接続端子を有し、所望の形象物の形状に形成し、該形象物の一部を可動させる趣向の高い装飾体可動装置を提供する。
【解決手段】コンピュータに周辺機器を接続するUSB規格の接続端子を有し、前記接続端子を外部機器に接続することによって電力供給が行われる装飾体可動装置であって、前記装飾体可動装置の外観は、所望の形象物の形状に形成され、前記装飾体可動装置の内部には、駆動部と、前記駆動部の回転を減速させる減速歯車列とを有し、前記減速歯車列から出力される回転によって可動する可動部とを備えた。
(もっと読む)
縫いぐるみ
【課題】手触りの良い柔軟性のある縫いぐるみであって、使用者が、引紐を把持して歩行すると、縫いぐるみが、恰も歩行しているかのような動作を行わせる趣向の高い縫いぐるみを提供する。
【解決手段】4つ脚を有する動物を模した形に形成され、その内部に中綿を詰めた柔軟性を有する縫いぐるみであって、縫いぐるみは、頭部24と、胴体部22と、左右の前脚部12と、左右の後脚部16とを有し、胴体部の内部に背骨部材32を有し、背骨部材の前端に前脚部材取付部40を備え、背骨部材の後端に後脚部材取付部46を備え、前脚部先端に設けた前脚先端部材52と前脚部材取付部とを接続する前脚部材34として弦巻バネを内蔵し、後脚部先端に備えた後脚先端部材58と後脚部材取付部とを接続する後脚部材36を内蔵し、首部分に引紐30を備えた。
(もっと読む)
模型体駆動装置、駆動体および模型体
【課題】駆動体と仕切板により隔てられた模型体の脚部の蹴り上げや振り上げを実現した模型体駆動装置、駆動体および模型体を供する。
【解決手段】仕切板5上で複数の脚部により本体を支える模型体20が、仕切板5を隔てた下方に配設された駆動体160の駆動に従動して動作する模型体駆動装置150において、模型体20は、複数の脚部が各々前後に揺動可能で、複数の脚部の各足端部にそれぞれ磁石Mfl,Mfr,Mrl,Mrrが一方の磁極を足裏に向けて設けられ、駆動体160は、互いに異極を上方に向けた1対の磁石を仕切板5の下面に沿って前後に近接して配列した複数組の磁石対mfl,mfr,mrl,mrrが上方の模型体の複数の脚部の各足端部にそれぞれ対応して走行方向に往復動自在に設けられ、往復駆動機構180により複数組の磁石対mfl,mfr,mrl,mrrを同時に前後に往復動させることで、模型体20の複数の脚部の各足端部の永久磁石Mfl,Mfr,Mrl,Mrrに磁力を働かせて複数の脚部をそれぞれ揺動させる模型体駆動装置、駆動体および模型体。
(もっと読む)
1 - 20 / 31
[ Back to top ]