
Fターム[2C150DA23]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426)
Fターム[2C150DA23]の下位に属するFターム
頭全体 (50)
頭の一部又は顔の一部 (62)
胴部 (48)
手 (97)
足 (127)
Fターム[2C150DA23]に分類される特許
1 - 20 / 42
玩具
【課題】玩具を提供すること。
【解決手段】無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。
(もっと読む)
可動眼球玩具および人形玩具

【課題】 電力によって開閉部位が動作する可動眼球玩具を組み込むことで飾った状態でも目が稼働する人形玩具を提供する。
【解決手段】 本発明の人形玩具は、可動眼球玩具10を備えており、この可動眼球玩具10は、開閉部位を有し、電力によって開閉部位を開閉させる動作装置23を有した二個の眼球と、電力供給装置29と、二個の眼球の動作装置23を同時に動作させる動作同期手段と、二個の眼球を所定の位置に固定する眼球固定手段と、を備え、動作同期手段はプログラムに従って各種処理を実行する演算装置31、および、少なくとも二個の眼球の動作装置23を同時に動作させる同期プログラムが記憶された記憶装置32からなる制御装置21によって構成され、さらに、外部環境の変化を検出した場合に制御装置21に環境変化検知信号を送出する環境変化検出装置25を有している。
(もっと読む)
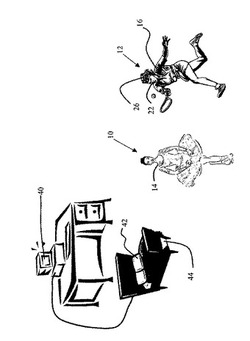
遠隔操作ロボット
【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
模型動物の目の構造
【課題】 従来の模型動物の目の瞳が動くようにしたものは、白眼を模して凹状に形成した目に瞳を模して形成した円板を入れて、その表面に透明板を張っているが、この目を取着した模型動物本体の震動で瞳が動く時、白眼を模した面に瞳を模した円板の背面が接触しているので、摩擦抵抗が生じ動きが少し鈍い欠点があった。
【解決手段】 模型動物の瞳を模した球を形成し、白眼を模した目を瞳を模した球の直径より深い凹状に形成して、この中に瞳を模した球を入れてその表面に透明板を張り、この目を模型動物の顔面目の位置に取着すると、本体の僅かな震動でも、球状の瞳は白眼を模した面に対して摩擦抵抗を生じることなく転動するので表情がよく変化する。そして球状瞳の凸点が光を反射してよく光るので見る人に生きているような錯覚を起こさせて可愛い。又、顔面と一体的に白眼を模した目を瞳を模した球の直径より深い凹状に形成して、この目を形成することもできる。
(もっと読む)
玩具セット、ゲーム制御プログラム、及びゲーム装置・玩具間交信システム
【課題】ゲーム装置のハードウェア構成を変えずに該装置と玩具との間で交信できる玩具セットを提供する。
【解決手段】玩具セットは、玩具と記憶媒体とから成り、記憶媒体に格納されるプログラムは、ゲーム装置の制御手段により実行されたとき、該装置に単一振動数の音を検出するフィルター手段と、検出された時系列的に配列された音の組合せに対応して音声等を出力させる出力手段と、単一振動数の複数の音を生成する生成手段と、該音の組合せにより制御信号を生成してゲーム装置の発音手段から送出する送出手段を構成するよう構成され、玩具は、発音手段と音声入力手段と制御手段と感知手段とを内蔵し、操作に応じて音声を出力し、制御手段は、単一振動数の複数の音を生成する生成手段を備え、該音の組合せにより制御信号を生成して玩具の発音手段から送出するように形成され、玩具は、ゲーム装置からの制御信号を入力し、該信号に対応して所定の動作を行う。
(もっと読む)
ロボット
【課題】 軽量、安全かつ優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
(もっと読む)
人形玩具の肩関節構造及び人形玩具
【目的】外観上のリアルさや美観を損なうことなく、よりリアルな立体的な肩関節動が可能な肩関節構造及び人形玩具を提供する。
【構成】人形玩具の上体部の肩部に、内転・外転する肩甲骨部材を介して腕部を回動可能に接続する構成の人形玩具の肩関節構造において、
上体部には、該上体部の肩関節位置に肩甲骨部材が側面方向から入り込む空間となる肩部取付凹部が設けられ、
肩甲骨部材には、肩部取付凹部に入り込んだ際に露出する側面部分に腕部が回動可能に接続する腕部取付関節部と、胸部側部分に前記内転・外転の枢支点となる枢支部と、該枢支部に回動可能に接続されて肩甲骨部材を上体部に回動可能に取り付ける肩甲骨取付部材と、が各々設けられ、
肩部取付凹部の内部の胸部側部分には、側面方向から差し込まれる肩甲骨取付部材を取り付ける肩甲骨取付孔部が設けられていること、を特徴とする。
(もっと読む)
対戦型ロボットシステム
【課題】互いに対決する両対戦型ロボットにそれぞれの電源線を用いて有線で電源を供給しながら、対戦型ロボットが移動することによって両電源線が互いに絡まることを防ぐ。
【解決手段】本発明は、有線で電源が提供されて互いに対戦する二つの対戦型ロボットと、上記各対戦型ロボットに電源を提供する電源部と、上記両対戦型ロボットの上部に位置して一定の長さを有し、ある一地点を回転軸として回転可能に具現された回転部材と、を含み、上記電源部はそれぞれの電源線を通して有線で電源を上記各対戦型ロボットに提供し、上記各電源線は上記電源部から始まって上記回転部材の回転軸から長さ方向に沿って両端部にそれぞれ形成されて上記両端部から上記各対戦型ロボットまでつながり、上記回転部材は上記各対戦型ロボットの移動によって上記回転軸を中心として回転することにより上記両電源線が互いに絡まることを防ぐ対戦型ロボットシステムを提供する。
(もっと読む)
人型ロボット
【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
人型機械
【課題】
マネキンや人形、ロボットなど人型機械に対し、ファッションモデルのように人の情動を呼び起こす魅力的で美しい下肢の動作制御を行うこと。
【解決手段】
関節が駆動する身体を持つマネキンやロボットなどの人型機械で、腰と脚が連動してファッションモデルのようなポーズをとるための美しい動きの表現方法と機構。
左右脚交差動作と左右股関節の前後揺動動作の同期による連動や、脚の旋回動作と股関節の上下
揺動の同期による連動により、下肢の美しい表現を可能にした。
(もっと読む)
関節構造
【課題】人形、ロボット、模型等の関節において、関節の角度を任意に保持でき易いと同時に、角度を滑らかに変化させ易い関節構造を提供する。
【解決手段】球面7で接し、接する両側の部分を、中央を挿通させる弾性線材9により互いに引っ張り押圧する。この挿通された弾性線材9が保持される小さな挿通保持孔13が、前記球面7の凹側の1部と、前記球面7の凸側で球面7から等距離中心部19と、に形成される。
このため、関節の角度が変化しても弾性線材9の長さはほぼ同じである。よって、弾性線材9の長さが短くなる角度に自然に変化してしまうことがない。したがって設定角度が保持でき易い。このため、角度を維持するに摩擦を大きくする必要がなく、小さな摩擦で角度を滑らかに変化させやすい。
(もっと読む)
動作生成装置、ロボット及び動作生成方法
【課題】発話内容に応じて身振り動作の処理速度を調整する動作生成装置を提供する。
【解決手段】動作生成装置20は、発話内容と発話内容に応じて動作パターンが動作する動作タイミングを保持する発話内容データベース2と、動作パターンに対応する動作データを登録する動作パターンデータベース8と、発話内容データベース2から発話内容を選択する発話内容生成部3と、選択された発話内容に応じて、説明に必要な動作パターンを判断する動作種別判断部7と、判断された動作パターンに基づいて、動作パターンデータベース8から動作データを抽出し、発話内容と動作データとを組み合わせる動作パターン組合わせ生成部9と、発話内容に応じた動作タイミングに基づいて、動作データの再生処理速度を調整する動作処理速度調整部10と、を備える。
(もっと読む)
ロボット
【課題】ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供する。
【解決手段】ロボット(1)は、電気的動作をすることで発熱する発熱源(61)を内部に備える。また、ロボット(1)は、発熱源(61)の発熱を吸収する熱吸収部(71)と、ロボット(1)の外装部に放熱する複数の放熱部(73)と、熱吸収部(71)から各放熱部(73)へ熱を伝導する熱伝導部(72)とで構成される熱伝導手段(70)を備える。熱伝導部(72)を、熱伝導部(72)の断面積が、熱吸収部(71)から放熱部(73)に至る熱伝導部(72)の経路長が長い程大きくなるように形成した。
(もっと読む)
関節連結されたコンピューター生成キャラクターからアニマトロニクスユニットを設計するための方法および装置
アニマトロニクスユニットに対する設計を特定する方法は、芸術的に決定された動きを含む動きのデータを受信することと、動きのデータに応答してアニマトロニクスユニットの少なくとも一部分の構成に対する設計を決定することと、アニマトロニクスユニットの構成に対する設計を出力することとを包含する。一実施形態において、アニマトロニクスユニットの挙動を決定する方法は、複数の制御信号を用いてアニマトロニクスユニットの少なくとも一部分のソフトウェアシミュレーションを駆動することによって、複数の制御信号に応答してアニマトロニクスユニットの少なくとも一部分の該挙動を推定することを包含する。  (もっと読む)
(もっと読む)
弦楽器演奏ロボット、及びその制御方法
【課題】簡便に異常を検知することができる弦楽器演奏ロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様に係る弦楽器演奏ロボットの制御方法は、演奏データにしたがって弦楽器を演奏する弦楽器演奏ロボットの制御方法であって、演奏データに基づいて弦を振動させ、弦の振動によって発生した音の音高を検出するステップS102と、演奏データに対応する音の音高と前記検出した音高との比較結果に応じて、異常を検知するステップS104と、を備えるものである。
(もっと読む)
おもちゃ
【課題】最小限の部材を使用するだけの簡単な構造で興趣に富んだ動作をすることができ、かつその動作に伴って倒れたり、位置が変動したりしないおもちゃを提供する。
【解決手段】柔軟性部材で構成された頭部、略円筒状の胴体部、及び吸盤部からなるおもちゃであって、頭部及び胴体部は一体成形されており、 胴体部と吸盤部とは前記吸盤部の上部を前記胴体部の下部に嵌め込むことによって接合されている。そして、前記吸盤部は一体成形された略円筒状の上部及び逆お椀型の下部とから構成されおり、吸盤部下部の逆お椀型の最大直径は吸盤部上部の略円筒状の最大直径の1〜3倍であり、吸盤部の逆お椀型の部分を床面や壁面などに吸着させることによって使用する。
(もっと読む)
コミュニケーション誘発システム
【課題】ぬいぐるみのような擬人的媒体を使ってユーザからのコミュニケーションを誘発できるシステムを提供する。
【解決手段】コミュニケーション誘発システム10は、ユーザ12の前方に配置されたぬいぐるみ14を含む。視線サーバ18がカメラ16で撮影したユーザ12の顔の画像からユーザの視線の方向を推定する。ぬいぐるみ14に内蔵したコンピュータは、ユーザの発話状態およびユーザの視線状態に応じて両者の間のコミュニケーション状態を推定または特定する。そして、そのコミュニケーション状態に従ってユーザにコミュニケーションを促すことができるように、ぬいぐるみの行動(発話および/または動き)を制御する。
(もっと読む)
人体の姿勢及び可動を再現しようとする立体構造物の肩部関節構造
【課題】 立体構造物において、人体の肩部及び腕部の姿勢及び可動を、一軸回転関節を使用して充分に再現すること。
【解決手段】 胴体背部に一軸回転関節5,6を設けることにより、より人体に近い肩部及び腕部の姿勢及び可動を再現する。
(もっと読む)
脚式移動ロボット
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
(もっと読む)
パペット内収納構造
【課題】パペットの内部に、人の手指以外の収納空間を設けるときに、内部収納物の出し入れのための出入り口が、パペットの美観を損ねるという問題点がある。
【解決手段】本発明では、内部に人の手指を入れるパペットにとっては絶対に無くすことが出来ない手指の挿入口を内部収納空間の出入り口と共用させることで、収納空間を設けることによる美観の低下を解消した。
(もっと読む)
1 - 20 / 42
[ Back to top ]