
Fターム[2C150DA28]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 足 (127)
Fターム[2C150DA28]に分類される特許
1 - 20 / 127
ロボット、ロボットの制御方法及び制御プログラム
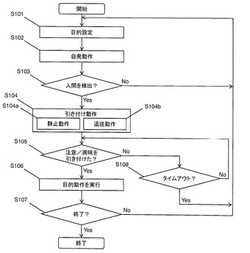
【課題】ロボットに注意や興味を引き付けるための「呼びかけ」や「しぐさ」等により人間が感じる強制感を抑制すること。
【解決手段】ロボットは、胴体部と、視覚センサが搭載される頭部と、を有するロボット本体と、前記視覚センサにより取得された情報に基づき、前記ロボット本体の周囲の人物を検知する第1の検知部と、前記胴体部に第1の動作を実行させる第1の動作モジュールと、前記胴体部に前記第1の動作を実行させているときに、前記第1の検知部が前記人物を検知した場合、事前に決められた時間だけ前記第1の動作を停止させ、かつ、前記視覚センサが前記人物を追従する様に、前記頭部に第2の動作を実行させる第2の動作モジュールと、を備える。
(もっと読む)
コミュニケーションロボット

【課題】使用者がロボットに向けて発話するとき、使用者がより話し易く、より親しみを感じることができるコミュニケーションロボットを提供する。
【解決手段】使用者が発する話し言葉を検知する音声検知手段と、所定の応答反応を表出する反応表出手段とを有したコミュニケーションロボットに、使用者の話し言葉に反応して予め定められた複数パターンの応答反応を表出させる。このとき、話し言葉が通常表現であるか否かの判定、話し言葉が同意要求表現であるか否かの判定、話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定を実施し、判定結果に基づいて異なる応答反応を表出させる。
(もっと読む)
自在継手
【課題】不自然な曲がりや金属疲労による折損がない、形状記憶合金のワイヤを用いた自在継手を提供する。
【解決手段】接合部材2と接合部材2との間を接合する自在継手であって、該自在継手は形状記憶合金からなるワイヤ1とした。接合部材2の一端には、ワイヤ1を差し込んで挿入する挿入孔2aが開孔され、ワイヤ1の両端を接合部材2の挿入孔2aに差し込んで自在継手とし、接合部材2を所望の角度に可変する。形状記憶合金のワイヤ1は、繰り返しの曲げ伸ばしにおける金属疲労が生じない。
(もっと読む)
タイマー装置
【課題】間計測中にユーザーを楽しませることができるタイマー装置を提供する。
【解決手段】本発明は、スタートスイッチ8が押されてからの時間を計測するタイマー67と、タイマー67により測定された時間が所定の時間経過するとそのことを報知する報知手段69とを備えたタイマー装置である。頭部11及び腕部12及び脚部13を有する本体部1と、前記本体部1に設けられて頭部11及び腕部12及び脚部13を駆動させる駆動部2と、前記駆動部2を制御する制御部6とを備える。制御部6は、前記駆動部2の複数の動作パターンが記憶された動作パターン記憶部62と、前記複数の動作パターンのうちから選択された動作パターンに基づいて前記駆動部2を制御する駆動制御部65と、前記スタートスイッチ8が押されることで前記駆動制御部65の制御を開始させる制御開始部61とを有している。
(もっと読む)
リング型アクチュエータ
【課題】ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供する。
【解決手段】リング型アクチュエータ1は、ぬいぐるみ2の棒状部位20を取り巻くように取り付けられて使用される。リング型アクチュエータ1には、モータ駆動の回転部材11a,11bが設けられている。この回転部材11a,11bの回転方向及び回転量を制御することで、棒状部位20を任意の方向及び角度で屈曲させる。
(もっと読む)
動作体玩具
【課題】 興趣性の高い動作体玩具を低コストで実現する。
【解決手段】 動物または人の形を模した形状を有する動作体玩具100であって、音声出力部を有し、かつ、肢部131〜133が動作可能に取り付けられた胴体部120と、胴体部120に対して、動作可能に取り付けられた首部によって支持されており、移動体通信機器150が嵌合されることで、移動体通信機器150を動作体玩具100の顔面位置において保持する頭部110と、頭部110において保持された移動体通信機器150に対するユーザ入力に応じて出力される信号を、胴体部120が有する音声出力部及び胴体部120に取り付けられた肢部131〜133を動作させる制御部に伝送するための伝送部材114とを備えることを特徴とする。
(もっと読む)
玩具体におけるカバー部材の動作構造および玩具体
【課題】 より簡単な構成により、見栄えのよい玩具体におけるカバー部材の動作構造および玩具体を提供する。
【解決手段】 本発明に係る玩具体におけるカバー部材の動作構造は、第1の部材および第2の部材を互いに接近、離間可能となるように連結している連結部と、連結部に対向する位置に設けられるカバー部材と、を備えてなり、カバー部材は、第1の部材が第2の部材に対して接近したときには、第2の部材との接触により連結部に対して移動可能となっている。
(もっと読む)
関節構造及び該関節構造を備えた人形
【課題】人形を構成する各部材の重量が増したとしても、人形を所定の姿勢に保持させ易い関節構造を得る。
【解決手段】関節に位置付けられた隣接する二つの部材が互いに接触する面に通孔を形成しており、両部材が通孔を連通させた状態で両通孔に通された弾性体によって互いに牽引されて連結している関節構造において、隣接する二つの部材における一方又は双方の通孔が形成された面に溝部を形成し、溝部に隣接する二つの部材よりも摩擦係数が高い材料で形成された滑止具を嵌め込む。
(もっと読む)
人形体の関節構造
【課題】腕や脚を動かしたときに、人間に近い動作を行い、本物らしく、見栄えの良好な姿勢をとることができる人形体の関節構造を提供する。
【解決手段】第1部材22は関節本体21の第1回動軸211に回動可能に支持され、第2部材23は関節本体21の第2回動軸212に回動可能に支持されており、第1部材22及び第2部材23を回動させると関節本体21が回転移動するので、人間に近い動作を行い、本物らしく、見栄えの良好な姿勢をとることができる。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
変形ロボット玩具
【課題】変形後の戦闘機において、ロボットの変形として予測させることが困難で、独自の戦闘機として構成したものと思わせる形態をとることのできる変形ロボット玩具。
【解決手段】ロボットを戦闘機の形態に変化できる変形ロボット玩具である。
胴体部の胸部に放射状に配置され複数の舌片部が、中心側に指向する先端を前記中心側と反対側に指向できるように胴体部に対して回動可能に配置できる。
戦闘機への変形操作は以下の通りである。頭部を胴体部に対して回動させることによって胴体部の背面側に移動し、左右腕部をそれぞれ先端が前記胴体部の上方で近接して位置づけられるように回動する。左右脚部をそれぞれ大腿部と下腿部との間の関節部で回動させることにより、先端が前記胴体部の腰部の両脇に位置づけさせる。複数の舌片部を回動させ、これら舌片部によって胴体部と左右腕部、左右腕部と左右脚部、胴体部と大腿部と下腿部との間の空隙部を閉塞する。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
重心移動装置を有する2足歩行ロボット及び重心移動方法
【課題】2足歩行ロボットにおいて、ヒトの2足歩行運動の様に、より自然な歩行姿勢を実現するための構造と重心移動方法を提供する。
【解決手段】腰部4と両脚から成る下肢と、腰部を軸に傾斜可能な腹部3と、頭部6及び可動可能な両腕が接続され、腹部を軸に回転可能な構造の胸部から成る上体から構成され、胸部筐体内に独立して上下左右に可動可能なバランサー42と称する駆動用バッテリー及びスタビライザー43と称する重心移動用補助錘を搭載し、各可動部はアクチュエーター8により可動であり、頭部に擁する3軸加速度センサー22により腰部を絶対水平に保ち、前後の重心移動は上体の前傾動作もしくは後傾動作、もしくはスタビライザーの胸部2筐体内での位置移動もしくは両脚の足関節部動作により行い、また左右の重心移動は腹部を軸とする胸部の回転動作と、バランサーとスタビライザーの複合動作により行う2足歩行ロボット。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
二脚式歩行装置
【課題】大きな歩幅と安定性とを両立させる。
【解決手段】少なくとも3点の接地点を有する右足裏1および左足裏3と、右足裏1から上方側に向かって延びるとともに右足裏1に対して回転接続される右脚2と、左足裏3から上方側に向かって延びるとともに左足裏3に対して回転接続される左脚4と、右脚2のうち右足裏1の反対側部位とを備え、右足裏1は、ジグザグ平面ローラー11の二等辺三角形のうち1つの二等辺三角形の底辺側部位上に位置し、左足裏3は、ジグザグ平面ローラー11の二等辺三角形のうち右足裏1に隣り合う二等辺三角形の底辺側部位上に位置し、ジグザグ平面ローラー11が転がる際に二等辺三角形が順番に接地して進行するように、右足裏1および左足裏3が順番に接地し歩行を実行する。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具は、ユーザから入力された音声に応えて、話し、歌い、動き、踊る能力を有する。予めプログラムされたパラメータと、各種センサからのリアルタイム入力との組合せに基づいて玩具の動きおよびそれに伴う音を制御およびカスタマイズするために、各種モータ、アクチュエータ、マイクロフォン、スピーカ、および集積回路手段が用いられる。玩具は、高度なインタラクティブ性、ならびにユーモア、自発性、および予測不可能性をユーザに提供する。 (もっと読む)
重力利用2足歩行機構
【課題】高級な部品、及び高度な制御技術を使わずに安価な2足歩行を実現する。
【解決手段】並行リンク機構の可動角を制限した脚機構に、外側が浮くように足を取付けた機構を、両側対象に配置し、腰板で結合した2脚機構の上に、左右の重心を変化させられる機構を設けた胴体を搭載した機構において、前進する方向に胴体が位置するよう並行リンク機構を曲げ、この状態にて左右方向の重心を変化させることにより片方の足を浮かし、浮いた足が重力により前に出るが、次に反対方向に重心を移動させ本体をかた向け、その時先に述べた反対足が前進した距離だけ全体が移動し、同時に反対の浮いた足が重力により前に出ることを交互に繰り返しことにより前進する重力利用の2足歩行機構。
(もっと読む)
人形の関節構造及び人形構成機構
【課題】関節の動きを確保しつつ、人体により近い外観を実現する人形を提供する。
【解決手段】人形の関節構造は、例えば肩関節において、間に可動関節を形成する胸部20と上腕部30と、連結部材81と、連結部材81の端部が可動に嵌め込まれる嵌合部材80、90とを有している。胸部20と上腕部30は、上腕部30の端部が胸部20の内側に摺動可能に挿入され、胸部20と上腕部30の内部には、嵌合部材80、90がそれぞれ配置され、当該嵌合部材80、90同士が連結部材81により連結されている。嵌合部材90は、上腕部30に対して相対的に移動可能であり、当該嵌合部材90には、胸部20と上腕部30が、少なくとも互いに離れる方向に移動した時に反発力を生じさせる弾性部材94が接続されている。
(もっと読む)
1 - 20 / 127
[ Back to top ]