
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
101 - 120 / 469
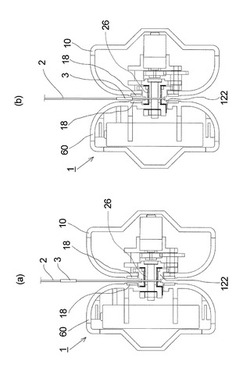
ヨーヨー紐巻付補助装置
【課題】
ヨーヨー紐の機能を損なうことなくヨーヨー紐に装着でき、年少者及び初心者でも簡単にヨーヨーを手元に引き戻すことができるヨーヨー紐巻付補助装置を提供する。
【解決手段】
ヨーヨー紐巻付補助装置3は、一対の回転体10,60と、一対の回転体10,60の中心部間に設けられた主軸26に回動可能に設けられた回転軸122とからなるヨーヨー1の回転軸122に巻き付けられるヨーヨー紐2に取り付けられる構成である。装置本体4はヨーヨー紐2を挿通することが可能な内径4aと一対の回転体10,60の隙間よりも狭い外径4bを有するパイプ状に形成され、ヨーヨー紐2と共に撓む弾力性を備え、ヨーヨー紐2に対して摺動可能且つ摩擦抵抗により所定位置で保持可能であり、回転中の回転体10,60の側面18,18に接触することによりヨーヨー紐2を回転軸122に巻き付けていく。
(もっと読む)
遊具装置

【課題】水遊びの疑似体験が可能な遊具装置の提供。
【解決手段】本発明の遊具装置100は、浴槽110に配置される鏡120と、支持体125及び、照明部材129と、ハーフミラー128と透明防水シート130と防水機構145と注入口146を備える。
支持体125及び、照明部材129は、鏡120上に配置され、ハーフミラー128が、支持体125に支持され、浴槽110の内壁に対して液密に配置される。透明防水シート130は、浴槽110の開口上部を被覆し、防水機構145により透明防水シート130を浴槽110に液密に固定する。
更に、ハーフミラー128と透明防水シート130間に液体を注入可能な注入口146を備え、ハーフミラー128と鏡120間領域を照明部材129により照明して、当該領域に光の反射を繰り返させることを特徴とする。
(もっと読む)
過負荷安全リニアアクチュエーターを備えた玩具組立セット
複数の玩具組立要素と、中心軸を有するとともに、該中心軸に対して同軸に配置された内ねじを有する第1のスピンドル部及び該第1のスピンドル部の内ねじにねじ込まれる外ねじを有する第2のスピンドル部を含む2つのスピンドル部を有する、過負荷安全リニアアクチュエーターとを備え、一方のスピンドルのねじは、第2のスピンドル部のねじの少なくとも2倍の長さである、玩具組立セットである。スピンドル部のうちの一方にスロットが設けられ、該スロットは、スピンドル部に構成されたねじの長手方向にかつ本質的に該ねじ全体に沿ってスピンドル部を通して延在するため、2つのスピンドル部をともに、又は互いに離して引くか又は押圧することにより、アクチュエーターの長さを容易に調節することが達成される。 (もっと読む)
無人回転翼機のモーター用の支持ブロック
無人機の各エンジンの支持ブロック130は、支持部131であって、当該支持部131に、無人機の推進ユニット100を駆動する電気モーター120と、当該モーターに連結されることを意図されている、推進ユニットの少なくとも1つの構成部材111が固定される、支持部131と、無人機を地上に支持するフット132と、支持部と支持スタンドとの間に延在する連結要素133とを備える。支持スタンドと連結要素はともに、電気モーターが支持部に固定されるように位置決めされる際に当該電気モーターのための隙間空間134を有する。 (もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
転動ロボット
【課題】構造の複雑化を抑制しつつ、常に全ての方向に転動させることができる転動ロボットを提供する。
【解決手段】立方体状の筐体2と、筐体2内に設けられたメインモータ10と、メインモータ10の回転軸の一端に固定されたフライホイール12と、回転軸に対して鋭角に交差する方向に沿って延在し、かつ筐体2に対してメインモータ10を旋回可能に支持する支持軸14,15と、メインモータ10を支持軸14,15周りに旋回駆動させるサブモータ13とを備え、支持軸14,15は、互いに隣接する任意の二面に投影させた形状がこの二面に平行な直線に対して傾斜した状態となるように設けられている。
(もっと読む)
傾斜面と移動体車両との組合せ
【課題】 走行車両等の移動体が傾斜面を走行する際に、空転ないし滑落することなく、安定して確実に走行することを可能にした傾斜面と移動体車両との組合せを提供する。
【解決手段】 傾斜面5を走行する移動体車両1における傾斜面5と移動体車両1との組合せにおいて、傾斜面5に植毛摩擦材4を敷設するとともに移動体車両1の車輪2周面に植毛摩擦材4を装着したことにより、傾斜面5と移動体車両1の車輪2周面における植毛摩擦材4、4同士が高い摩擦力にて接触して絡むと同時に、容易に分離することもできるので、粘着性タイヤや磁石の吸引力を利用したもののように経年劣化がなく耐久性に優れるのはもとより、傾斜面5からの離脱のためにエネルギーを費やすことがなく、移動体車両1が大きな傾斜路であっても高い摩擦力にて、安全かつ軽快に登坂あるいは降坂することが可能となる。
(もっと読む)
無人一輪車。
【課題】 一輪車を無人で転倒させることなく走行させる。
【解決手段】 フレームに車輪を懸架して無人で走行する無人一輪車において、フレームに車輪を駆動する走行用モータを取り付けるとともに、フレームから左腕と右腕を張出させ、フレームにこれら左腕と右腕をそれぞれ水平軸回りの回動と鉛直軸回りの回動をさせる上下用モータと旋回用モータを取り付け、フレームの重心変移で発生する前後方向及び左右方向の転倒モーメントに基づくフレームの転倒を、走行用モータによる車輪の前後移動に基づく前後方向引戻しモーメントと、上下用モータによる左腕又は/及び右腕の水平軸回りの回動に基づく左右方向引戻しモーメントと、旋回用モータによる左腕又は/及び右腕の鉛直軸回りの回動に基づく左右方向引戻しモーメント及び回行時の遠心力に基づく旋回モーメントとを発生させて防ぐ。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における操縦信号の送信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、先生用ラジオコントロール送信機と生徒用ラジオコントロール送信機とでのチャンネルオーダーの相違による不具合をユーザの負担にならないようにして解消する。
【解決手段】先生用ラジオコントロール送信機のチャンネルに、同じコントロール対象が割り当てられている生徒用ラジオコントロール送信機1Bのチャンネルを対応付ける操作を行ってチャンネル対応データを作成し、これを先生用ラジオコントロール送信機に保持させる。先生用ラジオコントロール送信機は受信したトレーナ信号のチャンネルを、チャンネル対応データに従って変換して操縦信号を生成、送信する。
(もっと読む)
ラジオコントロール送信機、ラジオコントロール送信機における通信方法
【課題】模型用のラジオコントロールシステムのトレーナ機能の利用にあたり、トレーナ信号受信機やトレーナケーブルを使用することなく、先生用と生徒用のラジオコントロール送信機との間での無線通信によってトレーナ信号が送受信できるようにする。
【解決手段】操縦信号の送信に2.4GHz帯での周波数ホッピング方式を採用する。そのうえで、トレーナモード時には、先生用ラジオコントロール送信機は、周波数が切り換えられるフレーム期間ごとに、操縦信号の送信とトレーナ信号の受信を実行する。生徒用ラジオコントロール送信機も、周波数が切り換えられるフレーム期間ごとに、トレーナ信号の送信を実行する。
(もっと読む)
対話式の玩具
線路配置と、線路に沿って進むように構成された複数の車両と、線路に着脱可能に結合された複数の目的地とを含む対話式の玩具トレインシステム。車両は、互いに通信するように構成され、車両は、目的地の1つ又は複数と通信するように更に構成される。システムは、ネットワークプロトコルを有する赤外線玩具ネットワークを含み、どれが存在しどれが存在しないかを判定し、それによって複数の車両及び目的地が知的に干渉なく会話できるようにする。 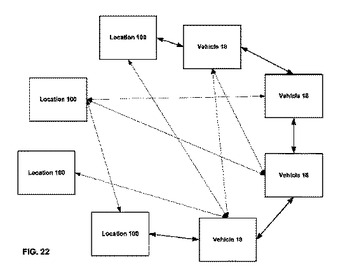 (もっと読む)
(もっと読む)
外付け式人間型手のためのアクチュエータおよび電子機器のパッケージング
【課題】外付け式人間型手のためのアクチュエータおよび電子機器のパッケージングを提供すること。
【解決手段】人間型ロボット用の下腕アセンブリは、第1の側および第2の側を有する腕サポートと、腕サポートの第1の側に取り付けられる複数の手首アクチュエータと、腕サポートの第2の側に取り付けられる複数の指アクチュエータと、腕サポートの第1の側にやはり配置される複数の電子機器とを備える。
(もっと読む)
振動モータ及び2列の脚部を有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物の本体部122と乗物の脚部との間には、空間、特にV字状の凹所があり、脚部は、正立回転中に内方に曲がる及び/または、脚部の列は、振動駆動部の回転軸の側部に位置する。 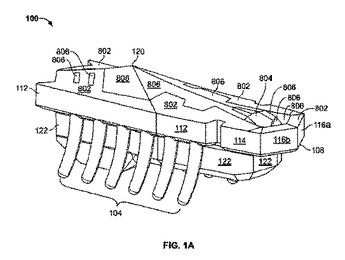 (もっと読む)
(もっと読む)
振動モータを有する乗物、特に自己正立する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。乗物は、振動モータの回転トルク205の効果によって回転して自身で正立するように構成されている。これは、例えば、本体部のまたは乗物の重心502を振動モータ202、210の回転軸に近接してまたは回転軸上に位置付けるように構成することによって達成される。 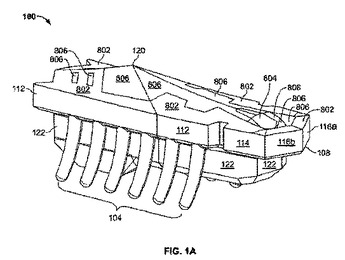 (もっと読む)
(もっと読む)
前方偏心ウェイトを有する乗物、特に振動モータを有する玩具ロボット
乗物、特に玩具ロボット100は、複数の脚部104と、振動駆動部202、210と、を有する。振動駆動部は、モータ210と、偏心ウェイト202と、を有し、偏心ウェイトは、前脚部104aの前方に配置されている。 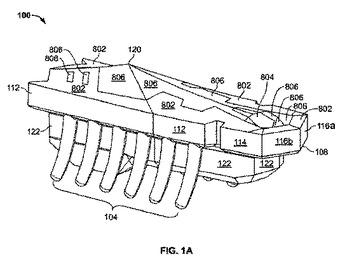 (もっと読む)
(もっと読む)
電動模型飛行機のプロペラ接続具
プロペラを備える電動模型飛行機における電動出力軸とプロペラとを接続するためのプロペラ接続具であって、2つの接続具を含み、一方の接続具が模型飛行機の電動出力軸と接続し、他方の接続具が模型飛行機のプロペラと接続し、上記両接続具のうちの一方の接続具が開口溝を備える弾性体であり、上記両接続具が同一軸上に互いに接続されて共に回動するが、外力の衝撃を受けると好適に分離し、プロペラを有効に保護することを特徴とする。 (もっと読む)
プロペラ玩具
【課題】 走行及び飛行を可能とし、走行速度を調整することができるとともに、着地時或いは走行終了時に直ちに停止することのできるプロペラ玩具を提供する。
【解決手段】 本発明のプロペラ玩具1は、機体10と、前輪11と、機体10の後部に枢着された連結部材5を介して取付けられた後輪12と、機体10上方へ突出するように取付けられロータ用駆動モータにより回転駆動されるロータシャフト30,40と、該ロータシャフト30,40に取付けられたロータ3,4と、機体10の底面から下方に突出した制動部材と、を備え、制動部材を走行面に接地させて、機体10が僅かに前傾とされた略水平姿勢とされた停止状態にあるときに、ロータ用駆動モータによりロータシャフト30,40を駆動させて、車輪を走行面に接地させた状態で機体10の後部を浮上させた前傾姿勢とさせて走行を開始し、ロータシャフト30,40を更に高速で駆動させることで離陸させて飛行するように構成されている。
(もっと読む)
跳躍体
【課題】高速かつ確実な作動が可能で、しかも構造が簡易な跳躍体を提供する。
【解決手段】上半体1と、当該上半体1に対し接近方向および離間方向へ相対移動可能に配設された下半体2と、両半体1,2を互いに離間させるように付勢するコイルバネ4と、上半体1に設けられて案内孔32が形成されたカム体3と、当該カム体3を回転駆動するモータ12と、下体2に設けられてカム体3の案内孔32により案内されて、当該カム体3の回転に伴ってコイルバネ4の付勢力に抗して上半体1と下半体2を接近方向へ移動させた後、コイルバネ4の付勢力によって上半体1と下半体2を離間方向へ移動させる操作部材5とを具備している。
(もっと読む)
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具は、ユーザから入力された音声に応えて、話し、歌い、動き、踊る能力を有する。予めプログラムされたパラメータと、各種センサからのリアルタイム入力との組合せに基づいて玩具の動きおよびそれに伴う音を制御およびカスタマイズするために、各種モータ、アクチュエータ、マイクロフォン、スピーカ、および集積回路手段が用いられる。玩具は、高度なインタラクティブ性、ならびにユーモア、自発性、および予測不可能性をユーザに提供する。 (もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
101 - 120 / 469
[ Back to top ]