
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
121 - 140 / 469
走行玩具
【課題】 弾倉内に弾丸が入っているときには、弾丸を1個ずつ確実に装填室へ装填することができる弾丸装填機構を備えた走行玩具を提供する
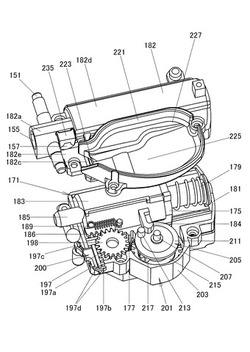
【解決手段】 本発明は、球形状の弾丸を発射する弾丸発射装置を搭載した走行玩具であって、この走行玩具は、弾丸発射機構171と、発射駆動機構201と、弾倉221と、弾倉221の弾丸を砲身の後端近傍に位置する装填室155内に装填する弾丸装填機構200と、を有し、弾丸装填機構200は、シリンダー183の側面前端近傍に形成されたシリンダーラック186と、シリンダー183の動きと同期して稼働し、弾丸を装填室155内に押圧する押し込み部材197と、シリンダーラック186と押し込み部材197の動きを同期させる同期カム198と、を備え、弾丸発射モータの駆動時において、シリンダー183が後方へ移動するタイミングに合わせて弾丸を1個ずつ装填室155内に装填するものである。
(もっと読む)
三足歩行ロボット

【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
(もっと読む)
自動車用ゴムタイヤ性能向上剤
【課題】自動車用ゴムタイヤに塗布するだけで、あらゆる路面において安定した走行を可能とするグリップ力を発揮するタイヤ性能向上剤を提供する
【解決手段】有機溶媒を主成分とし、ゴムタイヤ下地を調整するためのゴムタイヤ下地調整剤と、アルコキシシランと脂肪族炭化水素化合物を含有しゴムタイヤに含浸してグリップ力を向上させるためのグリップ力向上剤からの2液よりなるタイヤ性能向上剤。
(もっと読む)
ラジオコントロール自動車
【課題】実車のデザインを壊すことや使用者に対するコストの増加を強いることなく、複数種類のボディを装着できるシャーシを備えるラジオコントロール自動車を提供する。
【解決手段】前輪が連結される前輪軸と、後輪が連結される後輪軸と、前記前輪軸と前記後輪軸とを支持しボディが装着されるシャーシと、ホイールベースの寸法を調整するための調整手段と、を備えることを特徴とするラジオコントロール自動車。さらに、前記前輪を駆動するためのドライブモータと、前記前輪の操舵を行うためのステアリング機構と、前記ステアリング機構を駆動するステアリングモータと、を備え、前記ドライブモータと、前記ステアリング機構と、前記ステアリングモータとは、前記シャーシの、前記後輪よりも前記前輪に近い位置に配置されることを特徴とするラジオコントロール自動車。
(もっと読む)
回転玩具
【課題】この発明の回転玩具は、乳児の注意を強く惹くことができ、乳児の視覚的な発達を促進させることのできる外観を備えていて、製造が簡単で分解時点では条材を直線状にすることができるためコンパクトに梱包することができ、また輸送中にリング状の条材が変形したり、破損しにくい回転玩具を提供することを目的とするものである。
【解決手段】この発明の回転玩具は、可撓性を備えた条材と、該条材をその軸線方向に伸びる回転軸線を中心に回転駆動する回転駆動手段と、前記条材のそれぞれ異なる部位に対して前記条材の延長方向周りに回転自在に取り付けられた複数の飾り部品とを有する回転玩具であって
前記可撓性を備えた条材条材は、両端部を前記回転軸線に沿って配設された回転軸の長さ方向に所定の間隔で、かつ前記回転軸の周方向に位相をずらして螺旋状に接続されており、
該回転軸を中心にして回転駆動されるように構成されていることを特徴とする。
(もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
車両玩具
【課題】 デザインの自由度が高く、且つ軽量で部品点数が少なく、低コストで製作が可能な車両玩具を提供する。
【解決手段】 太陽電池から供給される電力によって駆動される車両玩具であって、合成樹脂材で形成された車体フレームと、上記車体フレームに取り付けられ、上記太陽電池で駆動される駆動部と、合成樹脂の発泡部材で形成された複数の車輪とを備え、上記太陽電池は、湾曲可能な薄板に形成されると共に、上記車体フレームに設けられた係止部に係合されて固定される構成とする。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
音源定位ロボット
指向性の高いトカゲの耳をモデリングする生態模倣ロボットを提供する。指向性は極めてロバストであり、神経処理は非常に簡単である。したがって移動式の本音源定位ロボットは容易に小型化することができる。本発明は2つの小型マイクロフォンからの音の入力を用いて、トカゲの耳の聴覚を模倣する単一な電気回路に基づく。回路はロバストな指向性をおよそ2−4kHzで生じる。回路の出力はモデル神経システムに供給される。神経系モデルは両側性であり、帯域通過フィルタのセットを含んで、両耳からの入力を比較するシミュレーションされたEIニューロンを有する。本モデルはデジタル信号プロセッサ上のソフトウェアで実装され、ロボットの左右のステアリングモーターを制御する。さらに、神経系モデルは、装置を自動校正するために自己適応できる神経ネットワークを含む。  (もっと読む)
(もっと読む)
送信装置
【課題】撮像装置が搭載された模型の存在を周囲に知らしめる技術を提供する。
【解決手段】送信装置22は、モータの駆動によって動作可能な模型車両に搭載される。入力部30は、模型車両に搭載された撮像装置が撮像した画像データを入力する。無線通信部34は、入力した画像データを送信する。監視部36は、入力部30が画像データを入力している場合に、モータの駆動状態を監視する。通知部40は、監視部36において監視している駆動状態に応じて、画像データの入力を通知する。
(もっと読む)
移動玩具
【課題】発光素子による効果的な光演出を実現できる移動玩具の提供。
【解決手段】移動玩具10は、ボディ12と、ボディ12に搭載され、移動玩具10を移動させる原動機と、少なくとも1つの発光素子LEDb〜LEDdと、発光素子LEDb〜LEDdを駆動して発光を制御する発光素子駆動部を含む。ボディ12の少なくとも一部に対して、背景領域BRb〜BRdと背景領域BRb〜BRdとは光透過特性が異なる模様領域TRb〜TRdとを有する光演出領域LRb〜LRdが設定される。発光素子LEDb〜LEDdはボディ12の裏側から光演出領域LRb〜LRdに向けて光を照射する。
(もっと読む)
車両玩具用走行制御装置
【課題】交差部においての車両玩具の走行を実際に近い形で実現可能な車両玩具用走行制御装置を提供すること。
【解決手段】交差部を構成する一方の軌道に、第1のストッパと第2のストッパとを配設し、第1のストッパに車両玩具が係止されているとき、第2のストッパを作動させて後続する車両玩具を係止し、1台ずつ交差部に車両玩具を進入させるとともに、他方の軌道において交差部に車両玩具が接近するときには、他方の軌道における車両玩具をして優先的に交差部に進入させるようにした。
(もっと読む)
鉄道模型の自動運転装置並びに鉄道模型の2列車自動運転方法及び2列車追突防止自動運転方法。
【課題】
列車の動力車に特別の細工をしないで二列車の定速の自動運転や2列車を同方向へ走行させた場合に自動追突防止可能な運転方法を提案する。
【解決手段】
Nゲージのような鉄道模型の動力車と全線路を複数のセクションに分割して夫々絶縁処理した線路とを使用し、動力車の走行・停止にかかわらず線路のどのセクションにあるかを検出して速度情報を検出する等の処理をマイコン部と制御情報をマイコン部に転送するパソコン部とで構成した装置で、自動運転をしたり、自動停止をしたり、2列車同方向への運転時に追突を防止して様々な高度の自動運転を可能にした。
(もっと読む)
遠隔操作コマ玩具
【課題】モータを高回転で回転させる回転時間を制限するとともに、その高回転のタイミングをむやみに使用できないように操作できる回数を制限してコマ玩具の制御に緊張感を与えることができる遠隔操作コマ玩具を提供すること。
【解決手段】遠隔操作コマ玩具Aは、コマ玩具1と、該コマ玩具1の動作態様を遠隔操作で変化させるリモートコントローラ装置2との組合せからなり、上記コマ玩具1にはモータ18が配置され、該モータ18は上記リモートコントローラ装置から発信される制御信号で回転方向と回転速度とが制御され、コマ玩具1のコマ軸24は上記モータ18の回転に連動して回転し、上記リモートコントローラ装置2には上記制御信号を操作する複数の操作部33を設けるとともに、該操作部33の操作に基づいて制御信号の発信を制御する制御部60を設けた。
(もっと読む)
軌道上を走行させる移動物体
【課題】外部電源に依存しない電源部を効率的に配置することで、外部電力事情に影響されずコンパクトかつ、操作性、安全性に優れた鉄道模型、自動車模型あるいはキャラクター玩具などの軌道上をモーター駆動で走行する移動物体を提供する。
【解決手段】軌道上をモーター駆動で走行する移動物体において、該移動物体のモーター駆動が軌道に設置された太陽電池から供給された電力で駆動することを特徴とする移動物体。
(もっと読む)
人形駆動装置
【課題】 擦弦型の人形駆動装置において擦弦動作を上腕及び前腕の両方の動作で行い、押弦動作も前腕を動作させて人間により近い形で演奏動作をさせる。
【解決手段】本発明の擦弦動作は前腕9の一端にワイヤー8を自在に取り付け、ワイヤー8は、円弧上のチューブ26を通って足裏の駆動部に連結されている。
一方上腕10の動きは、駆動レバー16に連結されたワイヤー18は足裏を通って駆動部に連結されている。
ワイヤー8、18を動作させると、バイオリンの弓上下に動き1弦から4弦までの擦弦動作をする。
押弦動作はワイヤー21は肩20の中心を通って、90度折り曲げられて前腕24の上部の穴25に自在に連結されている。
ワイヤー21はワイヤー18と止め金具19で結合されておりワイヤー18の動きと同じく動き、垂直の動きから水平の動きになって、上腕24を左右に動かせる。
(もっと読む)
クッキング玩具入力システム
【課題】総合的に料理全体を、料理の手順に合わせて子供が楽しみながら学ぶことができる仮想調理を行うことが可能な音声又は画像処理システムを提供する。
【解決手段】仮想調理を行うための遊戯に使用される音声又は画像処理システムであり、異なった形態の仮想調理を各々行う複数の入力装置11、12、13及び14と、各々の入力装置11、12、13及び14から入力されたデータに基づいて、各入力装置11、12、13及び14に対応する音声又は画像処理を行い、その結果を出力再生装置4に出力する音声又は画像処理装置3と、を備えた。
(もっと読む)
走行玩具
【課題】 従来の前輪が無くボールベアリングと走行路の磁石との吸引力のみで案内される走行玩具にあっては、走行速度が速い場合にはボールベアリングが磁石の磁力線外に出てしまってコースから外れる可能性があり、かつ、前輪が無いことから走行時の摩擦抵抗が大きく高速走行が行なえず、円滑な動きもできないことから走行時の見栄えも良くないといった問題がある。
【解決手段】 シャーシ1に対して左右方向に変移して前輪5の操舵を制御するタイロッド6と、走行路Bにおける少なくとも1つのコースに配線された磁性体からなる線路B3との吸引力によって変移して前記タイロッドを介して前記前輪を前記線路方向に変移させる磁石7と、後輪8を駆動させるモータ10と、該モータを駆動する電池とより構成した走行玩具である。
(もっと読む)
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
超音波映像リンキングシステム付き玩具
【課題】 テレビ放送やビデオソフト、さらにパソコン等でのキャラクター映像等に連動させて、キャラクター玩具からの所要の言語等の出力、光源の点灯、点滅、可動部の動作等を得ることができる超音波映像リンキングシステム付き玩具を得る。
【解決手段】 テレビ等での互いに同期した映像と音声を得る映像・音声発生源に、低音域の聞こえない超音波信号を混在させる超音波混合手段11と、超音波信号が混在した音声信号を出力する音声出力手段12を備える。さらに、人形等の気象玩具4に、音声に混在する超音波信号を集音する集音手段21と、その超音波信号を検出する超音波検出手段25と、超音波信号による通知信号に基づき選択される所要の言語を収納するメモリー手段23から選択する言語選択制御手段26と、選択した言語を可聴音として再生する再生手段27と、その再生した可聴音を出力する可聴音出力手段24等を設ける。
(もっと読む)
121 - 140 / 469
[ Back to top ]