
Fターム[2C150EB01]の内容
玩具 (16,863) | 動力源、動作又は機能を得るための手段 (1,440) | モーター (469)
Fターム[2C150EB01]に分類される特許
161 - 180 / 469
重心調整装置
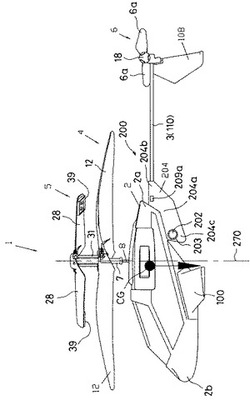
【課題】回転翼の回転軸の軸線方向に沿った飛行に加え、簡易な構造で、回転翼の回転軸の軸線方向に交差する方向への飛行を実現できる、操縦の容易な飛行玩具を実現するための重心調整装置を提供する。
【解決手段】回転軸を中心に回転する回転翼を有する飛行玩具の重心の位置を調整する重心調整装置であって、第1の錘と、前記回転軸の軸線と交差する方向に延在する第1の錘支持部材と、第1の錘を保持し、前記第1の支持部材の所定位置に係止可能な第1の錘位置決め手段と、を備え、前記第1の錘支持部材の延在する方向に沿って前記飛行玩具の重心の位置を調整することにより、前記第1の錘支持部材の延在する方向へ前記飛行玩具を飛行可能にする。
(もっと読む)
走路盤

【課題】レース途中で走行環境を変化させることができる走路盤を提供すること。
【解決手段】走行路に対して進退可能で進退位置によって玩具車両の通過を妨害する障害物と、障害物を走行路に対して進退させ当該障害物の進退位置を変更するためのモータと、モータを作動させるためのモータ駆動回路と、路面の一部を構成し、玩具車両が通過する際に当該玩具車両の重さによって下方に押圧される踏板と、モータ駆動回路に設けられ、常態でOFFであり踏板が下方へ押圧されている間ONされて当該モータ駆動回路を作動させる第1のスイッチと、を備えることを特徴とする。
(もっと読む)
全方向性車両玩具並びにその車輪
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
(もっと読む)
超小型飛行体
【課題】翼弦長を基準長とするレイノルズ数が10の5乗以下の領域を固定薄板翼により飛行する超小型飛行体の低抵抗飛行特性および大迎角飛行特性並びに操縦特性を向上する。
【解決手段】翼弦長を基準長とするレイノルズ数が10の5乗以下の領域を固定薄板翼により飛行する超小型飛行体において、当該固定薄板翼の前縁に近接して当該固定薄板翼の前縁の前下方45度から後上方45度までの範囲の位置に概ね滑らかな表面を有する円形断面の回転ロッドを当該固定薄板翼の前縁と当該回転ロッドの回転軸とが略平行となる位置関係において備え、当該回転ロッドを当該回転ロッドの周速度が一様流速度の2倍以上の速度となるよう当該固定薄板翼の翼循環方向と同一の回転方向に回転させることにより低抵抗飛行および大迎角飛行を実現する。また当該境界層制御手段を従来知られるスポイラー操縦装置と同様の効果を奏する要領において境界層制御操縦に利用する。
(もっと読む)
ヘリコプタ玩具
【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
遠隔操作のオートバイ模型
【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
遊技機
【課題】転動ロボットの動作を利用して商品性の高い遊技機を提供する。
【解決手段】制御ユニットは、操作ボードの操作ボタンに入力された動作パターンに応じてメインモータ3の回転軸4を回転させ、メインモータ3の回転トルクの反力により筐体2を第1面2aが接地する接地状態から、第1面2aの一辺を回動中心Oとして筐体2を転動させることを特徴とする
(もっと読む)
飛翔ロボット
【課題】 操縦機からの指示に応じて、飛翔ロボットを随意に自動的に空中静止させたり方位維持することができなかった。
【解決手段】
飛翔ロボットの機体の上部と下部とを自在継ぎ手により連結し、該自在継ぎ手を中心として該機体の上部と下部との間の相対傾き角を変える機構をサーボモータで駆動し、機体の傾斜角および/または傾斜角速度を傾斜センサで検出して飛翔ロボットの位置を制御する。また、回転翼の回転軸との傾斜角を変化させる補助翼を、方位センサで検出した方位角速度および/または方位角に基づいて動かし、飛翔ロボットの方位を制御する。
(もっと読む)
装飾装置及びからくり時計
【課題】装飾体を安定して回転させることができる装飾装置及びからくり時計を提供する。
【解決手段】アーム80a〜80cは、固定磁石95a〜95cから退避した退避位置に位置する際に所定の高さで保持され、所定の高さは、固定磁石95a〜95cに対するアーム側磁石85a〜85cの高さ方向の位置が、固定磁石95a〜95cからの磁力線とアーム側磁石85a〜85cからの磁力線との磁力の関係によって、アーム80a〜80cの回転に抵抗する力が最大になる高さよりも上方に位置する高さから、アーム80a〜80cが固定磁石95a〜95cの磁力線の影響により上昇することができる限界の高さまでの範囲内の位置である。
(もっと読む)
機能ブリックを有する玩具組立システム
組立要素を分離可能に相互接続するための連結手段を有する組立要素を備える玩具組立システムである。該玩具組立システムは前記連結手段を有する機能組立要素を備え、該機能組立要素はそれぞれ、制御可能な機能を実行するようになっている機能デバイスと、前記制御可能な機能を実行するために前記機能デバイスにエネルギーを提供するためのエネルギー源と、を有する。前記各機能組立要素は、制御信号をコード化した可視光を受信するための光センサーと、該光センサー及び前記機能デバイスに接続され、前記受信した制御信号をデコードすると共に該デコードした制御信号に応答して前記制御可能な機能を制御するようになっている制御回路とを備える。 (もっと読む)
ロボット犬
【課題】 従来のペット型ロボットと同様に、情緒的な交流が可能であり、人間を心理的に楽しませる機能を有するとともに、さらに散歩、荷物の運搬機能を有し、特に荷物の持ち運びが困難な人に役立つロボットを提供する。
【解決手段】 四本の脚4a、4b、4c及び4dの下端にそれぞれモータ12a、12b、12c及び12dで駆動する走行輪13a、13b、13c及び13dが設けられ且つ四本の脚4a、4b、4c及び4dによって歩行可能に構成された犬型のロボットであり、背部には荷物格納部14が形成され、荷物の運搬時には前記四本の脚4a、4b、4c及び4dを安定位置に固定して、前記モータ12a、12b、12c及び12dの駆動により走行可能に構成されてなり、好ましくは、人の接近を検知する検知器18を有し、コントローラ22を首輪部20から延長したリード線21の端部に設けたことを特徴とするロボット犬。
(もっと読む)
飛行玩具
【課題】 安定した直進飛行性能及び旋回飛行性能を具備し、容易に製作をすることができると共に見た目にも美しい飛行玩具を提供する。
【解決手段】 プロペラ飛行玩具1は、送信機からの操作信号によって遠隔操縦される飛行玩具であって、胴体部10と、該胴体部10に取付けられた主翼11,12と、胴体部10の後部に取り付けられた水平尾翼13と、該水平尾翼13から上方に突出する垂直尾翼14と、操作信号に応答して方向制御するラダー3と、主翼11の後方側に配置されたプロペラ2と、を備えてなり、プロペラ2は、その回転軸22の延長方向が水平尾翼13の上側に向かう方向に配置されており、プロペラ2の回転軸22の延長方向と垂直尾翼14の前後方向の延長方向は胴体部10の左右方向においてある間隔をもって互いにずれて配置されていることとする。
(もっと読む)
玩具用触覚リモートコントロール装置
【課題】ユーザに更なるインタラクティブな体験を提供し、リモート玩具装置の制御とインターフェースの容易性を大きく向上させることができる装置を提供すること。
【解決手段】触覚フィードバックリモートコントロール装置は玩具装置に制御信号を与える。前記リモートコントロール装置は、筐体(24)と、対応する発泡体(compliant foam)の層(62)と、充電電池(60)と、アクチュエータアセンブリ(50)とを備える。前記対応する発泡体の層(62)は、電池(60)のシステムに対する慣性寄与を低減し、ユーザがアクチュエータアセンブリ(50)で触覚感覚をより強く感じることを可能にする。
(もっと読む)
モータの制御装置及びそれを備えた転動ロボット
【課題】筐体の着地時における衝撃を抑制することができるとともに、筐体の動作パターンを増加させることができるモータの制御装置及びそれを備えた転動ロボットを提供する。
【解決手段】演算装置は、メインモータの回転角度を検出する回転角度検出手段の検出結果に基づいて、メインモータの回転速度を算出する回転速度変換器を備え、操作量演算部50は、筐体の角速度を検出する角速度センサの検出結果に基づいて、筐体の傾斜角を算出する傾斜角算出手段53と、筐体の現在の傾斜角と、目標値設定部で設定された目標傾斜角との傾斜角偏差信号に基づいて、傾斜角偏差に応じた出力信号を算出する傾斜角設定手段54と、メインモータの現在の回転速度と、目標値設定部で設定された目標回転速度との回転速度偏差信号に基づいて、回転速度偏差に応じた回転速度設定手段56とを備えていることを特徴とする。
(もっと読む)
電動銃における機械式通電停止装置
【課題】給弾経路に弾丸がなくなったときには、弾丸を発射させる駆動部の回路を遮断して通電を機械式に停止する。
【解決手段】
給弾経路13に移動可能に配置されかつ装弾部20へ弾丸Bを送るために付勢された玉押し部材22と、玉押し部材側と一端部にて係合し、連動するフォロワー部材40と、フォロワー部材の動きに伴い通電時の位置から遮断時の位置への移動の過程においてタペット部材35と係合し、タペット部材の移動に伴いスイッチ57をオフにするカットオフ部材50と、駆動部のピストンの移動に伴い後退して給弾口21を開く先端部分を有しかつその給弾口を閉じる方向への付勢力により上記カットオフ部材を動作させる上記タペット部材及びカットオフ部材との係合により移動して接点が開き、リセット操作により接点を閉じる上記のスイッチとを備えて構成する。
(もっと読む)
コイン判別装置及び貯金箱
【課題】集中的に配置された検出センサにより、シュートにて拘束されたコインを判別する。
【解決手段】コイン判別装置100は、第1ケース120及び第2ケース130と、第1ケース120と第2ケース130とにより挟まれる、断面がコの字型のシュート110とで構成される。シュート110には、下に行くに従って両側が狭くなる傾斜部114、115を有する。この傾斜部114、115の少なくとも一方としてコイン退避部材131が設けられる。コイン退避部材131は、モータにより動作され、当接面131AにコインCが当接された当接状態と当接状態を解放した状態とを切換える。板116及び当接面131Aに当接されて拘束されたコインCの近傍に集中的に配置された検出センサにより、コインCの種類が判別される。
(もっと読む)
ロボット玩具
【課題】より単純な構造でより自然な歩行動作を実現する。
【解決手段】胴体部1と、左右の足部を交互に前側に繰り出すように運足する一対の脚部2L、2Rと、駆動源11の駆動力を一対の脚部の各々に伝達する動力伝達機構3とを備えるロボット玩具100であって、一対の脚部は、胴体部に対して前後方向の軸を中心に揺動自在に設けられ、動力伝達機構は、駆動源の駆動に基づいて第1継手部材及び第2継手部材が一体となって回動する自在継手を備え、自在継手の回動によって、歩行面に接地した状態で前後方向に並んだ左右の足部20、20のうち、歩行面から離地する後側の一方の足部を他方の足部に対して外側に配置させ、且つ、他方の足部を追い越して接地する一方の足部を他方の足部と前後方向に並ばせるように一対の脚部を運足動作に同期させて揺動させる。
(もっと読む)
ヘリコプタのロータ
【課題】部品点数・部材量が少なく小型・軽量性に優れ、耐久性、性能維持性に優れたヘリコプタのロータを提供する。
【解決手段】回転翼10のピッチ動作とスタビライザ11の揺動動作とをリンクさせるリンク機構は、回転翼のピッチ軸から離れて回転翼に固定配置された第一当接子a1と、ピッチ軸から離れて回転翼に固定配置され、第一当接子とピッチ軸を基準に逆側の等距離に配設された第二当接子a2と、スタビライザの揺動軸から離れてスタビライザに固定配置された第三当接子a3と、揺動軸から離れてスタビライザに固定配置され、第三当接子と揺動軸を基準に逆側の等距離に配設された第四当接子a4とを有する。少なくとも飛行時に、第一当接子と第三当接子、第二当接子と第四当接子とがマスト軸方向の押圧力成分を有して当接し、滑動することにより、ピッチ動作と揺動動作とをリンクさせる。
(もっと読む)
駆動装置及びこれを有するロボット
【課題】駆動ユニットの回転力を従動ユニットに伝達するケーブルに充分な張力を発生させることで、駆動ユニット及び従動ユニットとケーブルとの間に発生するスリップを防止し、回転力を損失なしに伝達する駆動装置及びこれを有するロボットを提供する。
【解決手段】駆動ユニット30と、前記駆動ユニット30と接触しないように離隔空間を挟んで設けられ、前記駆動ユニット30から発生した回転力を受けて回転する従動ユニット40と、前記駆動ユニット30と前記従動ユニット40とを連結し、前記回転力を前記従動ユニット40に伝達するケーブル50と、前記離隔空間に設けられ、前記ケーブル50に張力が発生するように前記ケーブル50が互いに接近する方向に前記ケーブル50を加圧する加圧ユニット60とを含んで駆動装置を構成する。
(もっと読む)
走行玩具
【課題】車体を伸長させたバギータイプの自動車形状からロボット形状へ、また、ロボット形状からバギータイプの自動車形状へと変形させることができる走行玩具を提供する。
【解決手段】前輪を備えた前方車台と、後輪を備えた後方車台と、前記前方車台と前記後方車台とを連結し、かつ車台を折り曲げるための車台折曲機構とから構成され、前記前輪と後輪の少なくとも一方を駆動する駆動手段を設け、さらに前記車台折曲機構は、前方部が前記前方車台の中間部に回動可能に嵌合され、かつ後方部が前記後方車台と回動可能に連結される車台折曲手段を含み、かつ前記前方車台の長さは少なくとも前記後方車台の長さよりも長いことにより、前記車台折曲手段を回動させて車台を折曲した際に、前記前方車台の後端部が前記後方車台よりも高い位置となるまで前記前方車台が起き上がる。
(もっと読む)
161 - 180 / 469
[ Back to top ]