
Fターム[2C150EC11]の内容
Fターム[2C150EC11]に分類される特許
1 - 6 / 6
歩行玩具
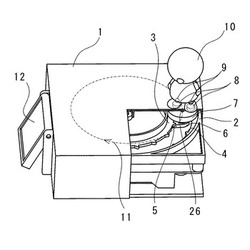
【課題】脚部に磁着体を持つ人形を、台座上で台座下の磁力により移動させる玩具において、人形に複雑な機構を要することなく、人間の歩行に似た動作を付加する方法を提供すること
【解決手段】台座1内部の上面の下の外側軌道板2、内側軌道板3からなる通路に磁石保持部材7を摺動可能に、かつ、外側軌道板2の下の、回転レバー6の従回転軸26に回動可能に軸支して載置し、回転レバー6を回転させた時に、磁石保持部材7の一部が左脚支点用突起4及び右脚支点用突起5により交互に回動し、台座1上面に載置された人形10の両脚の脚裏付近に設けた磁着体9が、磁石保持部材7に固着した磁石8との吸着力により左右交互に回動前進するようにして、人形に歩行に似た動作をしながら移動する動きを与えた。
(もっと読む)
三足歩行ロボット

【課題】 歩行ロボットには多数の関節があり、その関節を駆動するアクチュエータ、制御回路、制御ソフトウェアの製作・整備に多大な負担がかかり、しかし歩行ロボットの運用場面においては不要な機能も存在し、これが無用な重量増加も生み出し、歩行ロボットの運用を困難なものにしていた。
【解決手段】 移動動作をするためにアクチュエータを搭載した脚部を歩行ロボット腰部中央にのみ設置する事で移動動作に要するアクチュエータの数を減らし、この脚部を持ち上げた状態での胴体を支持できる支持脚を腰部に設置する。
(もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
屋内鯉のぼり翩翻装置
【課題】構成簡単であり、低コストとなる屋内鯉のぼり翩翻装置を得る。
【解決手段】屋内鯉のぼり翩翻装置1は、第1伝動機構9を、電動モータ8の出力軸8Aに固着した第1スプロケットホイール14、中心軸6に固着した第2スプロケットホイール15、これらスプロケットホイールの双方に巻き掛けたチェーン16により構成し、第2伝動機構10を、第1スプロケットホイール14に突設した偏心ピン17に転動可能に設けたローラ18、中間軸7から半径方向に突出し、ローラ18を転動案内可能に挟み込む案内アーム手段19により構成し、第3伝動機構11を、中心軸6に固着したウォーム20、中心軸6に直交するよう回転自在に取り付けた水平軸21に固着してウォーム20に噛合するウォームホイール22により構成し、ウォームホイール22に偏心させて設けたロープ連結部23にロープ12を連結する。
(もっと読む)
人力飛行機
【課題】従来のベルヌーイの法則を利用した翼を使った人力飛行機は高速でないと、大きな揚力が得られないので飛行できない。低速でも大きな揚力が得られて飛行できる人力飛行機及び模型飛行機を提供する。
【解決手段】長方形の板2をバックスピン(逆回転)させて、マグナス効果を利用して低速でも大きな揚力を得て飛行できる。
(もっと読む)
連続給弾機構を有するマガジンと連続発射機能を有する玩具銃
【課題】本発明は、マガジンを銃にセットするだけで、銃側の発射動作に合わせるようにマガジン側の球状弾送り出し機構を自動的に瞬時に駆動させ、発射された球状弾の発数に見合うだけの球状弾送り出しを行い、発射動作の停止に伴ってマガジン側の球状弾送り出し機構も自動的に停止する、というような、駆動力源を内蔵しないタイプの着脱自在式多弾数高速連射用マガジンを提供することを課題とする。
【解決手段】高速連続射撃に瞬時に追従できるだけの球状弾送り出し機構をマガジン側に設け、その球状弾送り出し機構を、玩具銃側が有する駆動力を伝達利用して作動させることにより、高速連続射撃に対応した自動強制給弾を達成する。
(もっと読む)
1 - 6 / 6
[ Back to top ]