
Fターム[2C150EC31]の内容
Fターム[2C150EC31]の下位に属するFターム
Fターム[2C150EC31]に分類される特許
1 - 3 / 3
全方向性車両玩具並びにその車輪
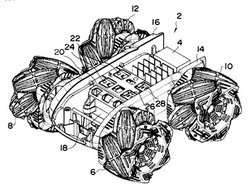
【課題】従来のブラケットによって生じる課題を解決するとことにより低コストで品質の安定した全方向性車両玩具並びにその車輪を提供する。
【解決手段】回転駆動部を搭載する車体と、前記回転駆動部と減速部を介して連結される複数の回転軸と、回転軸に装着される中心部材と、前記中心部材を構成する第一の中心部材と前記第一の中心部材に相対する第二の中心部材との間に複数のロールが回転自在に挿入される全方向性車両玩具において、前記第一の中心部材の端部が前記第二の中心部材側に傾斜して折り曲げられて前記ロールの一端を回転自在に支持する第一の支持部が設けられ、前記第二の中心部材にも前記第一の支持部と平行となるように折り曲げられて前記ロールの他端を回転自在に支持する前記第二の支持部が設けられることで中心部材に対してロールを傾斜させて支持する。
(もっと読む)
ラジコン模型の制御装置およびその操縦パラメータ設定システム

【課題】制御パラメ−タをラジコン模型の動特性に容易に設定し、あるいは変更でき、送信機側の負担を軽減したラジコン模型の制御装置およびその制御パラメータ設定システムを提供する。
【解決手段】パーソナル・コンピュータ200で変更・設定し、ラジコンヘリコプターに通信ケーブル12を介して転送された設定情報の各種設定値は制御パラメ−タとしてメモリ4の設定値格納部4Aに格納される。ラジコンヘリコプターの動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号はラジコンヘリコプターに搭載された受信機2で受信される。操縦指令信号は受信機2のデコーダ2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4の設定値格納部4Aに格納されている設定値に従ってそれぞれ加工される。加工された各操縦指令信号は、後段の駆動機構に供給され、それぞれの制御対象を制御する。
(もっと読む)
脚車輪型移動ロボット、その動作方法及びプログラム
【課題】ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
(もっと読む)
1 - 3 / 3
[ Back to top ]