
Fターム[2C150ED08]の内容
Fターム[2C150ED08]の下位に属するFターム
上下 (12)
前後又は左右 (54)
全方向 (29)
方向変換の手段又は部材 (44)
Fターム[2C150ED08]に分類される特許
1 - 20 / 30
サーボ装置及び該装置を備えた遠隔操作装置
【課題】サーボ装置の応答特性の設定を送信機から容易に行うこと。
【解決手段】送信機10からの制御信号を受信し、この制御信号を予め記憶部35に記憶された特性データに応じて、モータ制御部34で駆動信号に変換して駆動機構32を駆動制御する制御部31を備えたサーボ装置30において、制御部31は、制御信号が操縦信号か特性データ信号かを判別する信号処理部33と、制御信号が特性データ信号であると判断したときは、受信した特性データ信号に基づき特性データが更新記憶される記憶部35とを備えた。
(もっと読む)
ロボット

【課題】ロボットに「ぬくもり」(温度)を与えることで、使用者がロボットの「体温」を感じ取ることができ、その結果、動物に接触している感覚に近いロボットを提供する。
【解決手段】ロボット(1)は、電気的動作をすることで発熱する発熱源(61)を内部に備える。また、ロボット(1)は、発熱源(61)の発熱を吸収する熱吸収部(71)と、ロボット(1)の外装部に放熱する複数の放熱部(73)と、熱吸収部(71)から各放熱部(73)へ熱を伝導する熱伝導部(72)とで構成される熱伝導手段(70)を備える。熱伝導部(72)を、熱伝導部(72)の断面積が、熱吸収部(71)から放熱部(73)に至る熱伝導部(72)の経路長が長い程大きくなるように形成した。
(もっと読む)
遠隔制御装置
【課題】被遠隔制御対象体を直感的かつ容易に遠隔制御できる遠隔制御装置を提供する。
【解決手段】遠隔制御装置1は、自走車100とコントローラ200と演算部140,240とを備え、自走車100は、第1の方位基準点101に対する第2の方位基準点102の方位を検知するための方位センサ120を有し、コントローラ200は、第3の方位基準点201に対する第4の方位基準点202の方位を検知するための方位センサ220と、第3の方位基準点201を基準として、自走車100を移動させる移動方向を演算部240に入力するための操作用レバー260とを有し、演算部140,240は、方位センサ120によって検知された方位と、方位センサ220によって検知された方位と、操作用レバー260によって入力された移動方向とに基づいて、自走車100を、第1の方位基準点101を基準として移動方向に向かって移動させるように制御する。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
走行路の一部に設置された磁石により走行制御される電動走行玩具
【課題】走行体に搭載した電動モーターによって車輪を駆動して走行路を自走する走行玩具において走行体へ与える指示を簡単な電気的方法で遠隔操作可能とする。
【解決手段】走行体2に搭載した電動モーター6によって車輪5を駆動して走行路1を自走する走行玩具2において、走行体2には走行路1上の一部に設置された磁石3を検出するための磁気センサ4と、上記磁気センサ4からの信号を受け取って走行用モーター6の回転を制御するための制御装置を搭載し、磁気センサ4が走行路1上の磁石3を検出すると、上記制御装置は、磁石3の配置パターンに応じて上記走行体2の走行する方向を逆転させる、または上記走行体2の走行速度を上げる、または上記走行体2の走行速度を下げる、または上記走行体2を停止させるように走行用モーター6の制御を行う。
(もっと読む)
動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラムを得ることを目的とする。
【解決手段】資料の説明を受けている来場者の反応量を測定する反応量測定部2を設け、身体制御部3が反応量測定部2により測定された反応量に応じて身体を制御する。これにより、プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる。
(もっと読む)
ラジコン模型のサーボモータ中立位置設定装置
【課題】サーボモータの出力軸にサーボホーンを嵌合する単純構造で高い精度で中立位置を設定可能としたラジコン模型のサーボモータ中立位置設定装置を提供する。
【解決手段】サーボモータ1の出力軸20のサーボホーン40の嵌合穴50と嵌合する部分を角柱とし、該角柱の外側壁の少なくとも1面にサーボホーン40の嵌合穴50の挿入方向と平行に形成された凸条20Aを形成し、嵌合穴50の内側壁の少なくとも1面に出力軸20の外側壁に有する凸条20Aの形成方向と同方向に形成されて当該凸条に嵌合する凹条50Aを設け、筐体側に、サーボモータ1の出力軸20の一方向での最大回転角度と該一方向と逆の方向での最大回転角度を規制する制限する構造を設け、サーボモータ1の出力軸20が一方向と逆方向の最大回転角度位置にある時のポテンショメータの各出力値の中間値をサーボモータの出力軸の標準中立位置と定める。
(もっと読む)
ラジコン模型の制御装置およびその操縦パラメータ設定システム
【課題】制御パラメ−タをラジコン模型の動特性に容易に設定し、あるいは変更でき、送信機側の負担を軽減したラジコン模型の制御装置およびその制御パラメータ設定システムを提供する。
【解決手段】パーソナル・コンピュータ200で変更・設定し、ラジコンヘリコプターに通信ケーブル12を介して転送された設定情報の各種設定値は制御パラメ−タとしてメモリ4の設定値格納部4Aに格納される。ラジコンヘリコプターの動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号はラジコンヘリコプターに搭載された受信機2で受信される。操縦指令信号は受信機2のデコーダ2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4の設定値格納部4Aに格納されている設定値に従ってそれぞれ加工される。加工された各操縦指令信号は、後段の駆動機構に供給され、それぞれの制御対象を制御する。
(もっと読む)
ラジコン模型
【課題】操縦者(取り扱い者)等の安全を確保すると共に、ラジコン模型自身の安全確保も実現したラジコン模型を提供する。
【解決手段】中央制御装置3に有する安全管理部312は、バッテリー27が正しく接続された時は、ブザー制御部313にバッテリーが接続されたことを示す第1パターン鳴動信号指令を供給し、バッテリーが正しく接続された状態でスタートボタンが押されているチェック期間は、ブザー制御部313にスタート操作中を示す第2パターン鳴動信号指令を供給し、チェックによって正常と判定した場合には、ブザー制御部313に動力モータ7が駆動可能なスタンバイ状態になったことを告知する第3パターン鳴動信号指令を供給する判定部314を有する。
(もっと読む)
走行玩具のレールポイント自動切換機構
【課題】 走路にレールを有する走行玩具のレールポイント切換方式において、既存の切換ガイドバーを、より簡単な構造で自動的に作動させ、ポイントを切換える機構。
【解決手段】 走行玩具の最後方車両の、あるいは車両の、その後部車輪に、あるいはその直後の車両床下にマグネットを取り付け、一方、切換ガイドバーに磁性体の鉄線等を取り付け、この後部車輪が、この切換ガイドバー部を通過する時、この取付たマグネットによって切換ガイドバーが引き寄せられ、結果、これが切換ガイドバー回転軸のまわりに回転し、ポイントを切換えるものとする。
(もっと読む)
二重反転回転翼機
【課題】大きな前進推力で水平方向に移動することができ、しかも、前進飛行する場合の飛行安定性が優れた二重反転回転翼機を提供する。
【解決手段】上方と下方とが開口し側方が全周にわたってダクト21で囲われた機体本体11と、機体本体から上方に延びる主回転軸27に沿って同軸上に支持され、主回転軸の回りを互いに反対方向に回転する上部メインロータ22および下部メインロータ23を備えた二重反転回転翼機10であって、機尾側ダクト21aから後方に向けて延設される垂直尾翼41と、垂直尾翼の上端に取り付けられ、上方に延びる副回転軸により支持されるピッチングプロペラ42と、垂直尾翼の左右両側の側面に取り付けられる傾斜尾翼44とを備える。
(もっと読む)
二重反転回転翼機
【課題】風の影響を受ける環境でも風に対抗しつつ水平移動したり、ホバリングしたりすることが容易な小型の二重反転回転翼機を提供する。
【解決手段】機尾側ダクト21a近傍のピッチングプロペラ42と、目標地点の空間座標を記憶する目標地点情報記憶部61と、GPS信号により現在地点を検出する現在地点検出部51と、機体を移動させようとする水平方向の目標方位および目標地点までの水平距離を算出する水平変位算出部52と、方位センサ38bと、現在方位が水平方向の目標方位に向くように制御するヨー角コマンドを発生するとともに、ピッチングプロペラの回転速度を目標地点までの水平距離に比例するように変化させて上部メインロータ22および下部メインロータ23による水平方向の推力を制御することにより機体の水平方向の位置を制御する水平位置コマンドを発生するロータ制御部55とを備える。
(もっと読む)
ロボット制御システム
【課題】オペレータの意図通りに移動ロボットを操縦することが容易となるロボット制御システムを提供する。
【解決手段】オペレータがコントローラを操作することによって移動ロボットを操縦するロボット制御システムであって、コントローラは、移動ロボットに動作命令を入力する手段と、オペレータに移動ロボットの制御状態を表示する表示手段を有しており、移動ロボットは、本体と、本体を移動させる手段と、移動ロボットの姿勢状態を検出する手段と、コントローラから入力された動作命令に基づいて移動ロボットの姿勢状態の目標値を決定する手段と、移動ロボットの姿勢状態が決定された目標値が示す状態となるように移動手段を制御する手段と、検出手段が検出した姿勢状態と目標値との差分値を算出する手段とを有しており、表示手段は移動ロボットが算出した差分値に基づいた指標を表示する。
(もっと読む)
玩具装置
【課題】実際の自動車のハンドルを握ってその自動車を運転している感覚を味わえる玩具装置を提供する。
【解決手段】自動車玩具と、この自動車玩具を遠隔操作するためのリモコン2とを具備する。リモコン2は、左右一対の把持部14を有するハンドル形状のリモコン本体11を備える。リモコン本体11内には、リモコン本体の右傾き状態および左傾き状態を検出するスイッチ式の傾き検出手段を設ける。傾き検出手段がリモコン本体11の右傾き状態を右スイッチで検出すると、自動車玩具の前輪が設定回動角度をもって右方向に回動する。傾き検出手段がリモコン本体11の左傾き状態を検出すると、自動車玩具の前輪が設定回動角度をもって左方向に回動する。
(もっと読む)
ヨット玩具
【課題】折畳み時に一部の帆を残すことなく完全に折畳めかつ煩雑な作業なく折畳めるヨット玩具を提供する。
【解決手段】船体上に鉛直に立設されるマストと、前記マストを引張して船体に固定して支持する左右のサイドステーと、前記マストを後方から引張して船体に固定して支持するバックステーと、前記マストから懸吊されるフォアステーと、前記フォアステーに懸吊されるジブブームに取り付けられるジブシートと、前記マスト下端に回動可能に設けられるメインブームに取り付けられるメインセールを備えるヨット型玩具において、前記マストに設けられて前記ジブシートと前記メインセールを上部から懸吊してマスト上端部からマスト下端部までを昇降させるセール昇降部を備える。
(もっと読む)
垂直離着陸機
【課題】 ラジコン模型飛行機の垂直離着陸機の場合は、実機に比べてあまり複雑な構造や制御が出来ない。また、軽量にしなければホバリングそのものが出来なくなるほか、動力を2基以上にして複数で用いる場合は、そのパワーバランスなども難しい要素となる。
【解決手段】動力は1基としてラジコン模型飛行機に通常つかわれているプロペラを用い、上向きに装着して、ホバリング時はその推力の一部を分流した空気により前後左右の制御を行う方式とした。ホバリングから前進飛行に移る場合は、下部の開閉扉を閉じることにより、推力を後ろ側に偏向させ、通常の前進飛行を行うことが出来る。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 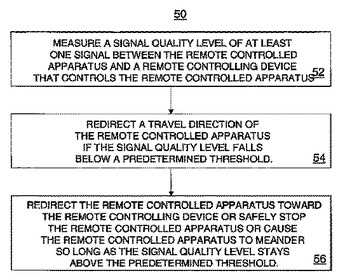 (もっと読む)
(もっと読む)
動作プログラムの入力が簡単なダンス人形
【課題】曲のイメージにあったダンスを簡単にプログラムすることができるダンス人形。
【解決手段】前記課題を解決するため、本発明に係るダンス人形は、以下の要件を備えることを特徴とする。
イ)駆動用モーター1個に対応する1個の入力スイッチを持ち、押すごとに駆動モーターを「A押して正転→B離して停止→C押して逆転→D離して停止」を繰り返す制御回路を持つこと。ロ)上記AからDまでの入力動作サイクルを予め設定された複数回数nを行い、その複数回数nの入力動作サイクルすべてのAからD個々の測定時間を時系列に記憶させる制御回路を持つこと。ハ)上記入力動作が終了後にその記憶させた動作パターンにおいて駆動モーターを繰り返して駆動させる制御回路を持つこと。
(もっと読む)
障害物センサおよび障害物センサを有する玩具
【課題】
検出対象を一定の範囲に限定しない、検出範囲の広い障害物検出センサであり、且つ、構造を単純なものとすることができる障害物検出センサを用いた玩具を提供する。
【解決手段】
本発明は、モータを制御する駆動制御手段と、前記モータに流れる電流を検出する検出手段と、前記検出手段から過負荷電流検出信号が入力されると前記駆動制御手段にモータを逆転させる制御信号を出力する主制御手段とで構成される制御スイッチ回路と、動力部と車輪部とにより制御される走行手段を有し、前記走行手段は動力部と車輪部との間に転舵部を有し、転舵部はモータの回転方向により車輪の向きを変化させるものであり、外部にセンサを用いることなく、スイッチをONとするだけで、障害物にぶつかる度に走行方向を変え、自動で障害物から脱出することができる、変化のある複雑で楽しい動きを楽しむことができる走行玩具である。
(もっと読む)
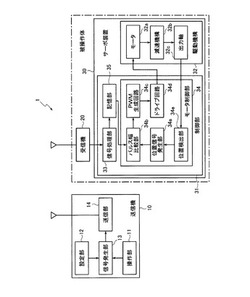
模型用走行装置、並びにその走行装置を備えた模型及び遠隔操作玩具
一対のモータ(7)と、一対のモータ(7)により個別に駆動される左右一対の車輪(8)と、速度及び方向に関して与えられる指示に基づいて一対のモータ7のそれぞれの動作を制御する制御装置(20)とを備える模型用走行装置(6)において、制御装置(20)は、指示された速度(Vm)が低速域(L、M)にある間は一対のモータ(7)が指示された方向へ交互に回転し、指示された速度が低速域よりも高い高速域(H)にある間は一対のモータ(7)が指示された方向へ同時に回転するように一対のモータ(7)を制御する。 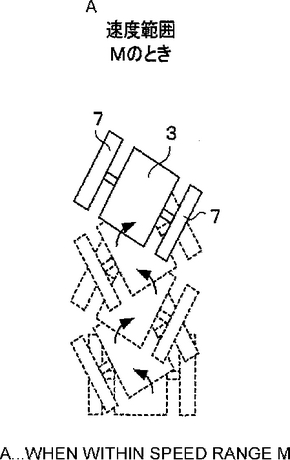 (もっと読む)
(もっと読む)
1 - 20 / 30
[ Back to top ]