
Fターム[2C150ED43]の内容
玩具 (16,863) | 制御 (873) | 制御手段 (529) | プログラム又は記録によるもの (443) | 変更可能 (17)
Fターム[2C150ED43]の下位に属するFターム
Fターム[2C150ED43]に分類される特許
1 - 11 / 11
人型ロボット

【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
情報処理装置、情報処理方法および情報処理プログラム

【課題】発光ダイオードを用いて判定される特定人に所定の事項を出力する。
【解決手段】 情報処理装置10は、LED130が周囲の光を吸収することによりLED130に発生する起電圧Veを測定する測定器135と、測定器135により測定された起電圧Veと予め定められた閾値Sthとを比較する比較部150と、その比較結果に基づきLED130に近づいたものが所定の特定人か否かを判定する判定部155と、判定部155により特定人と判定された場合、判定された特定人用に予め定められた所定の事項をその特定人に対して出力する出力部160とを有する。
(もっと読む)
楽器演奏ロボットおよび楽器自動演奏方法
【課題】周囲温度の差異、楽器の器差の影響等により発生する音高のずれを自動修正する。
【解決手段】本発明の一態様に係る楽器演奏ロボットは、演奏動作を行い楽器の演奏を行う楽器演奏ロボットであって、演奏動作により演奏した楽器の演奏音を入力するための音情報入力部31と、音情報入力部31に入力された演奏音の音高と基準音高とを比較し、音高のずれを判別する判別部と、判別部で判別された音高のずれに基づいて、演奏動作を修正する修正部とを備える。
(もっと読む)
関節連結されたコンピューター生成キャラクターからアニマトロニクスユニットを設計するための方法および装置
アニマトロニクスユニットに対する設計を特定する方法は、芸術的に決定された動きを含む動きのデータを受信することと、動きのデータに応答してアニマトロニクスユニットの少なくとも一部分の構成に対する設計を決定することと、アニマトロニクスユニットの構成に対する設計を出力することとを包含する。一実施形態において、アニマトロニクスユニットの挙動を決定する方法は、複数の制御信号を用いてアニマトロニクスユニットの少なくとも一部分のソフトウェアシミュレーションを駆動することによって、複数の制御信号に応答してアニマトロニクスユニットの少なくとも一部分の該挙動を推定することを包含する。  (もっと読む)
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
カメラ内蔵型デジタル玩具
【課題】撮像した画像に対するエフェクトの付加を簡単に行う。
【解決手段】圧縮処理部7aは、時系列的な撮像画像にフレーム内符号化処理を施すことによって、時系列的な圧縮画像を生成する。フォーマット変換部7bは、圧縮画像に対して、シーケンスデータ(初期値)を付加する。シーケンスデータ編集部7cは、テンプレートの内容に基づいて、シーケンスデータ中のビットを変更することによって、シーケンスデータを編集する。伸張処理部7dは、編集後のシーケンスデータに基づいて、圧縮画像を順次読み出し、フレーム内復号化処理を施すことによって、伸張画像を生成する。エフェクト実行部7eは、編集五のシーケンスデータに基づいて、伸張画像にエフェクトを付加したグラフィックデータと、サウンドデータとを生成する。これにより、動画および音声が同期再生される。
(もっと読む)
遠隔制御デバイスに対する紛失または損傷を低減する方法および装置
第1送受信機(9)と、第2ワイヤレス送受信機(20)および第2プロセッサ(24)を有する遠隔制御式装置(18)を制御する第1プロセッサ(16)とを有する遠隔制御デバイス(12)。プロセッサは、ワイヤレス送受信機(複数可)によって送信される信号の信号品質レベルを測定して、信号品質レベルが、所定の閾値未満に下がる場合、遠隔制御式装置の向きを変えるようにプログラムされることができる。プロセッサ(複数可)は、遠隔制御デバイスの方に遠隔制御式装置の向きを変える(56)か、遠隔制御式装置を安全に停止させるか、または、信号品質レベルが所定の閾値を越えて留まる限り、遠隔制御式装置がミアンダリングするようにさせる制御信号を送信するようにさらにプログラムされることができる。 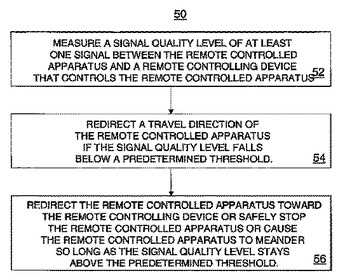 (もっと読む)
(もっと読む)
リハビリ教育用患者模擬ロボット並びにリハビリ教育方法
【課題】実際の生身の患者に類似した応答を示し、リハビリの訓練・教育に適したリハビリ教育用患者模擬ロボットを提供することを目的とする。
【解決手段】コンピュータに予め症例に応じたリハビリの標準施術モードを入力しておき、回動可能な2部材接合により構成される関節が所定のトレーニングにより受ける荷重の変化を測定し、上記標準施術モードと比較して評価するようにした。これにより、リハビリのトレーニングを反復して行なえると共に、高度のリハビリ技術を短期間で習得できるものである。
(もっと読む)
サウンド玩具
【解決すべき課題】装置本体のいずれのポジションに載置しても、複数ある玩具体の各固有のダミー楽器を恰かも指揮者が居るかの如く完全に同期させ合奏させることができるようになしたアミューズメント性に優れたサウンド玩具を提供する。
【課題を解決するための手段】複数の玩具体1A〜1Hの当接部8に一対の接触端子9A,9Bを付設すると共に、当該接触端子に繋がるそれぞれ異なった抵抗値を有する抵抗器10を各玩具体に具備させる。装置本体をなす筐体2には音声記憶手段14、音声出力手段7、マイクロ・コントローラ15を具備させる。筐体2の載置面3には前記玩具体の接触端子9A,9Bに対応する一対の電極16A,16Bを複数個付設する。この電極に関連して複数個のIDセレクタ17A〜17Hを設けた。
(もっと読む)
ロボット装置およびロボット装置システム
【課題】 特定の話者が音声を発する際の癖を表現することにより、話者が伝達しようとする情報を、聴衆に正確に理解させることができるロボット装置を提供する。
【解決手段】 人体各部分の動きと同様の動きを起こさせるアクチュエータ群13と、音声を発するスピーカ12とを備えたロボット装置10であって、入力された文章の各語句について音声合成部33により合成された音声をスピーカ12から発するとともに、その語句が語句/癖対応データベース34に登録されている場合に、その語句に対応する癖データに記憶された人体各部の動きを形体癖模写部35により模写させて音声と動きとを同期させる。
(もっと読む)
玩具
【課題】 少ないセンサ等で多種多様な動作をすることができる玩具を提供する。
【解決手段】 人形本体1はでん部センサ23および額部センサ31を有し、各センサの感知の有無の組み合わせによって、異なる音声を発したり、使用者と会話を行ったりする。例えば、人形本体1を座らせると、でん部センサ23が光不感知で額部センサ31が光感知の「音声認識可能状態」となり、「音声認識可能状態」から人形本体1を抱き上げると、でん部センサ23が光感知で額部センサ31が光感知の「抱き上げ状態」となる。さらに「抱き上げ状態」から人形本体1を抱きしめると、でん部センサ23が光感知で額部センサ31が光不感知の「抱きしめ状態」となる。一方、「音声認識可能状態」で部屋を暗くするとでん部センサ23が光不感知で額部センサ31が光不感知の「消灯状態」となる。
(もっと読む)
1 - 11 / 11
[ Back to top ]