
Fターム[2C150EF01]の内容
Fターム[2C150EF01]の下位に属するFターム
動くもの (12)
走行路又は面等の範囲 (8)
Fターム[2C150EF01]に分類される特許
1 - 3 / 3
ロボット、ロボット制御方法およびプログラム
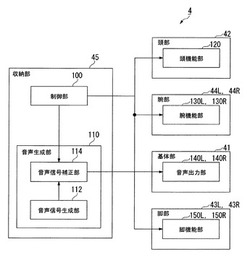
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
自動走行装置

【課題】障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【解決手段】駆動源と該駆動源により駆動される駆動輪とを有し、該駆動輪の駆動によって走行体を自動的に走行させるとともに、前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記駆動輪を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行う。
(もっと読む)
無線タグ
【課題】 分別廃棄が容易な無線タグを提供する。
【解決手段】 アンテナ14にICチップ11を搭載したインレイと、前記インレイの表面に第1の粘着材層13を介して形成される表層12と、前記インレイの裏面に形成される第2の粘着材層15と、前記インレイの縁辺部に前記第1の粘着材層13と前記第2の粘着材層15が接する部分を有し、前記第1の粘着材層13と前記第2の粘着材層の粘着強度15が、表層12と第1の粘着材層13の粘着強度よりも弱く、前記第1の粘着材層13と前記アンテナ14との粘着強度よりも、前記アンテナ14と前記第2の粘着材層15との粘着強度が弱く、第1の粘着材層13とアンテナ14の粘着強度が、第1の粘着材層13と表層12の粘着強度よりも弱いように無線タグ18を構成し、アンテナ14とICチップ11の分別を容易にする。
(もっと読む)
1 - 3 / 3
[ Back to top ]