
Fターム[2C150EF11]の内容
Fターム[2C150EF11]に分類される特許
1 - 20 / 26
知育用メカトロ融合型木製積木
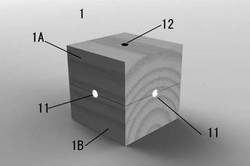
【課題】感性的側面における優れた素材による積木を提供する。
【解決手段】蝦夷松等の木材によって立方体、直方体、円柱、四角錐、三角錐等の多面体であったり球等の所定の立体形状に構成された木製積木1であって、外部要因を検知する光センサ、傾きセンサ、磁気センサ、音センサ、接触センサ、カラーセンサ又は温度センサ等の検知装置と、検知装置で検知した信号を処理する制御装置と、制御装置からの出力に応じて作動する発光体、振動体、発音体等の作動装置と、電源部とを内部に有する。
(もっと読む)
情報再生装置

【課題】 フィギアやカードを用いて多彩な出力が可能な情報再生技術を提供する。
【解決手段】 少なくとも底部にドットパターンが形成されたフィギアと、フィギアが載置されるステージと、ドットパターンを読み取る光学読取手段と、前記読取結果に対応したマルチメディア情報、プログラムおよび/またはゲームパラメータ等の出力情報を出力する出力手段と、を備えた台座と、を備え、台座には、フィギアが載置される面とは逆のステージ面の裏面側を撮像する単一の光学読取手段と、ステージの裏面を照射する照射手段とを有している情報再生装置とした。これにより、フィギアの底面のドットパターン毎に異なる音声やゲームパラメータを出力することができるため、フィギアやゲームに対する興味を高めることができる。
(もっと読む)
モータ制御回路及び該回路を実装したサーボ装置
【課題】モータ駆動制御用の駆動周波数を任意に変更して所望の操作感覚でサーボ装置を操縦すること。
【解決手段】受信機20を介して送信機10から制御信号として周波数設定信号を受信すると、予め記憶した駆動周波数設定情報のうち、受信した周波数設定信号に応じた情報を選択する。また、送信機10から制御信号である操縦信号を入力すると、選択された駆動周波数設定情報に基づき、パルス幅比較部34bから差分データタイミング信号に同期して取り込んだ差分データ信号を、選択された駆動周波数に対応するように周波数変換処理する。そして、得られた差分データ変換信号を周波数処理情報に基づき所定のカウント範囲まで使用して駆動信号を生成し、駆動機構32の駆動制御を行う。
(もっと読む)
鉄道模型保守監視システム
【課題】鉄道模型の集電電圧の不良箇所の特定や原因の推定が困難であった。
【解決手段】レール1からの集電電圧を測定する電圧測定部21と、走行体の現在位置を特定する位置特定手段25と、電圧測定部で取得した測定電圧値及び位置特定手段で取得した走行体位置の各情報を送信する無線送信部27とを搭載した走行体2、および走行体の無線送信部から送信された情報を受信するための無線受信機4と、この無線受信機から得られた受信情報を監視者へ伝達するための情報処理表示手段5とを有した監視装置を備え、情報処理表示手段5に走行体2の位置に対する集電した測定電圧値をグラフ表示するようにして、集電不良の発生原因と発生場所の特定が行えるようにした鉄道模型保守監視システム。
(もっと読む)
ロボット、状況認識方法および状況認識プログラム
【課題】各種のセンサを用いずにロボットが保持されている保持状況を認識することを課題とする。
【解決手段】ロボット1は、ロボット1の各部位間を接続する関節に設けられた複数のサーボモータ33P、33R、33Y、35R、35L、37R及び37Lを有する。さらに、ロボット1は、各サーボモータ33P、33R、33Y、35R、35L、37R及び37Lのトルクを用いて、ロボット1の部位に対する拘束状況を検知する。
(もっと読む)
球技用打撃玩具
【課題】 球を打撃したような感触を得るとともに、複数人で優劣を競う遊戯をすることのできる球技用打撃玩具を提供する。
【解決手段】 球技用打撃玩具10を振って打撃動作を行うと、内部に収容されている測定用錘22が、ガイド部材21に沿って手元側端部から先端側端部へ移動する。制御部25は、測定用錘を検出している手元側端部の始点側スイッチ23がオフとなったときから、先端側端部の終点側スイッチ24が測定用錘22を検出してオンとなるまでの移動時間に基づいて、球の飛距離を算出して、表示手段26により表示する。このため、複数の遊戯者が飛距離を争う遊戯を行うことができる。また、測定用錘22が先端側へ移動して、先端側端部に設けられているストッパ212に衝突することにより、実際に球を打撃したような感触を得ることができる。
(もっと読む)
コントローラ、模型装置、およびコントロール方法
【課題】模型装置がユーザの意図しないエリア内へと移動してしまう可能性を低減する。
【解決手段】コントローラ100は、模型装置から模型装置の現在位置を受信するための通信インターフェイス170と、模型装置の移動許可エリアの指定を受け付けるための入力部132,150と、模型装置を移動させるための命令を受け付けて、模型装置の位置に基づいて命令によって模型装置が移動許可エリアから出るか否かを判断し、模型装置が移動許可エリアから出ない場合に通信インターフェイスを介して命令を模型装置に送信し、模型装置が移動許可エリアから出る場合に模型装置に命令を送信しないプロセッサ110とを備える。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
シート状玩具
【課題】車玩具の通過を検知したときの状況等に応じて出力する音声を制御することで、遊び方にバリエーションを持たせることが可能なシート状玩具を提供する。
【解決手段】表面に車玩具を走行させて遊ぶための道路A及び駐車スペースBが描かれたシート状玩具10であって、前記道路A及び前記駐車スペースBの上を車玩具が通過したことを検知するための複数の検知部15を備えた通過検知手段14と、音声を出力するためのスピーカ12と、シート状玩具10全体の作動を制御するための制御装置100と、を備え、前記制御装置100は、予め複数の音声データを記憶した音声記憶手段120と、前記通過検知手段14が車玩具の通過を検知したときに、前記音声記憶手段120が記憶する複数の音声データから1の音声データを選択する音声選択手段130と、前記音声選択手段130が選択した音声データを前記スピーカ12に対して出力するスピーカ制御手段140と、を備えるようにした。
(もっと読む)
発音制御装置
【課題】ユーザによって配置された物体の位置関係に応じた音を発音させる技術を提供する。
【解決手段】ユーザによって本体装置の配置面にブロックが配置されると、配置されたブロックの姿勢情報が各ブロックから本体装置に送信される。本体装置は、配置された全てのブロックに対する発音指示をユーザから受付けると、配置されたブロック間の距離等の位置関係を検出し、検出した位置関係と各ブロックから送信された姿勢情報に基づいて、各ブロックに対して割当てられている音の発音を行う。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
無人一輪車。
【課題】 一輪車を無人で転倒させることなく走行させる。
【解決手段】 フレームに車輪を懸架して無人で走行する無人一輪車において、フレームに車輪を駆動する走行用モータを取り付けるとともに、フレームから左腕と右腕を張出させ、フレームにこれら左腕と右腕をそれぞれ水平軸回りの回動と鉛直軸回りの回動をさせる上下用モータと旋回用モータを取り付け、フレームの重心変移で発生する前後方向及び左右方向の転倒モーメントに基づくフレームの転倒を、走行用モータによる車輪の前後移動に基づく前後方向引戻しモーメントと、上下用モータによる左腕又は/及び右腕の水平軸回りの回動に基づく左右方向引戻しモーメントと、旋回用モータによる左腕又は/及び右腕の鉛直軸回りの回動に基づく左右方向引戻しモーメント及び回行時の遠心力に基づく旋回モーメントとを発生させて防ぐ。
(もっと読む)
鉄道模型の自動運転装置並びに鉄道模型の2列車自動運転方法及び2列車追突防止自動運転方法。
【課題】
列車の動力車に特別の細工をしないで二列車の定速の自動運転や2列車を同方向へ走行させた場合に自動追突防止可能な運転方法を提案する。
【解決手段】
Nゲージのような鉄道模型の動力車と全線路を複数のセクションに分割して夫々絶縁処理した線路とを使用し、動力車の走行・停止にかかわらず線路のどのセクションにあるかを検出して速度情報を検出する等の処理をマイコン部と制御情報をマイコン部に転送するパソコン部とで構成した装置で、自動運転をしたり、自動停止をしたり、2列車同方向への運転時に追突を防止して様々な高度の自動運転を可能にした。
(もっと読む)
無人機を操縦する装置
本発明は、無人機8を操縦する装置10であって、筐体傾き検出器12と、複数のタッチセンシティブエリア30、32、34、36、38、40、42を表示するタッチ画面16とが備わった筐体を備える、装置10に関する。無人機には、ユーザーからのコマンドを何も受信していない場合に静止飛行のために自律式安定化システムが備わっている。装置は、(i)無人機の自律式安定化システムを作動させるモードであって、無人機に送信された操縦コマンドはタッチセンシティブエリアによって発せられた信号の変換によって生じるモードと、(ii)無人機の自律式安定化システムを作動停止させるモードであって、無人機に送信された操縦コマンドはハウジングの傾き検出器によって発せられた信号の変換によって生じるモードと、の間で無人機の操縦モードを交互に切り換える作動/作動停止ボタンを形成する、触知性エリア30によって操作される手段を備える。 (もっと読む)
応答するブック・システムとそれを実現する方法。
【課題】 現実的な応答するブック・システムを提供する。
【解決手段】 本発明の応答するブック・システムは、(A)検知システムを有するブックと、前記検知システムは、前記ブックの複数の検知可能なページから現在のページを検知し、(B)記憶装置と、前記記憶装置は、前記検知可能なページに関連するコンテンツを記憶し、(C)リモート・レスポンダと、前記リモート・レスポンダは、前記現在のページに関連するコンテンツを再生或いは表示する、を有する。
(もっと読む)
情報再生装置及び情報入力装置
【課題】 フィギアやカードを用いて多彩な出力が可能な情報再生技術を提供する。
【解決手段】 少なくとも底部にドットパターンが形成されたフィギアと、前記フィギアが載置されるステージと、前記ステージに設けられた1又は2以上の読取孔より読取光を照射してその反射光でドットパターンを読み取る光学読取手段と、前記読取結果に対応した音声情報および/又は画像情報を記憶する記憶手段と、前記記憶手段から読み出した音声および/または画像情報を出力する出力手段とを備えた台座とからなる情報再生装置としたことによって、フィギアの底面のドットパターン毎に異なる音声等を出力することができるため、ユーザに対して、あたかもフィギアのキャラクタが発声しているような親近感を抱かせることができる。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
パーソナルロボット
【課題】 往復運動における外力等により生じる位置ずれを簡易、かつ、低コストの手段で効率よく解消する。
【解決手段】 頭部2がステッピングモータ211により回動制御されるパーソナルロボットであって、頭部2の特定の回動位置を検出する光センサ214aと、光センサ214aからの検出信号に基づき、頭部2を当該頭部2が正面を向いた位置を基準に所定の回動範囲をもって往復運動するようにステッピングモータ211を制御する制御手段と、を備え、光センサ214aが、頭部2が正面を向いた位置を検出するように設けられた構成としてある。
(もっと読む)
ビデオゲームシステムのための表示の調整方法
本発明は、ビデオゲームシステム(1、3)のための表示の調整方法(49)に関する。本システムは、車両(1)の姿勢のセンサ(31)を有する遠隔操縦車両(1)と、表示ユニットを備え、サーキット(57)上の車両(1)を遠隔操縦するのに用いられる電子エンティティ(3)とを備える。本方法は、センサ(31)を介して車両(1)の瞬間姿勢を動的に取得するステップと、センサ(31)から出力される瞬間姿勢の値を基にしてサーキットの少なくとも1つの傾斜パラメータを動的に推定するステップと、サーキットの単数(複数)の傾斜パラメータの推定値に応じて電子エンティティの表示(49)を調整するステップとを含むことを特徴とする方法。  (もっと読む)
(もっと読む)
制御装置、対戦型ロボットシステム、及びロボット装置
【課題】 操作者によって操作されて対戦する複数のロボット装置の制御に関し、種々の工夫を行って趣向性を高めることが可能な制御装置を提供する。
【解決手段】 操作者によって操作されて対戦する複数のロボット装置3、5を制御する制御装置19は、複数のロボット装置3、5のいずれかが操作者によって操作されて攻撃動作が実行される前に、当該攻撃動作が実行されることにより他の対戦相手のロボット装置3、5が受ける物理的影響の度合いが予め定められた範囲内に収まるように、実行される攻撃動作を自動調整する自動調整部23を備える。
(もっと読む)
1 - 20 / 26
[ Back to top ]