
Fターム[2C150EF13]の内容
Fターム[2C150EF13]に分類される特許
1 - 20 / 42
ロボット端末及びロボットシステム
【課題】ロボットが実行できる処理を工夫して、他のロボット端末との間でコミュニケーションを図ることを実現すること。
【解決手段】ロボット端末300に、ロボット端末400との同期をとる同期手段と、人間からのアクションの有無を判定する判定手段と、ロボット端末400と協働して使用者に披露すべきアクションを実行するためのアクションデータが格納されるメモリと、メモリに格納されているアクションデータに基づくアクションを実行する実行手段と、所定時間を計時する時計とを備え、同期手段によってロボット端末400との同期がとられた後であって、時計によって所定時間の計時中に、判定手段によって人間からのアクションがないと判定された場合に、実行手段によってメモリに格納されているアクションデータに基づくアクションを他のロボット端末と協働して実行させる。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム

【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
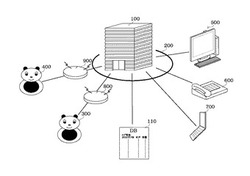
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
遠隔操作ロボット
【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
鉄道模型
【課題】空間の利用効率および鉄道車両の再現性を向上しつつ、さらに車両に動きを加えることで興趣を高める。
【解決手段】鉄道模型100は、壁面160に固定するための背板110と、背板に固設され、鉄道車両を模した鉄道車両模型の一部であり少なくとも鉄道車両の先頭部を含む部分筐体112と、外部から制御情報を取得する情報取得部114と、部分筐体に設けられた変動体116と、取得された制御情報に応じて、変動体を異なる態様に変動させる変動制御部122とを備える。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
コマンド認識装置、コマンド認識方法、及びコマンド認識ロボット
【課題】ユーザが意図した場合に発話によりロボットの動作を制御するためのコマンドを認識する、コマンド認識装置、コマンド認識方法及びコマンド認識ロボットを提供する。
【解決手段】発話情報から単語列情報を決定又は選択する発話理解部21と、前記発話情報と前記文に基づいて音声確信度を算出する音声確信度算出部221と、画像情報と前記文に含まれる語句情報に基づいて語句確信度を算出する語句確信度算出部22と、音声確信度及び語句確信度に基づいて、前記単語列情報のコマンドを実行するか否かを判断する動作制御指示部225とを備える。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 表現の豊富化を可能にするとともに、遷移する際の姿勢や動作が最適化されたロボット装置及び動作制御方法を提供する。
【解決手段】 ロボット装置1は、コントローラ32により、現在の姿勢から目標とされる姿勢又は目標とされる動作までの経路を、行動指令情報S16に基づいて、姿勢及び動作が登録されて構成され、姿勢とこの姿勢を遷移させる動作とを結んで構成されたグラフ上において探索し、探索結果に基づいて動作させて、現在の姿勢から目標とされる姿勢又は目標とされる動作に遷移させることにより、ロボット装置1やコンピュータグラフィックスで動くキャラクターの表現の豊富化が可能になる。
(もっと読む)
人型ロボット
【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
LED光るミニカー
【課題】コレクションとしていたミニカーを防犯アピールとしてミニカーの一端にLED球、CdSセル、ボタン電池を設けたLED光るミニカーを提供する。
【解決手段】ミニカー1の一端にLED球2、CdSセル3、ボタン電池4を設けたLED光るミニカー。
(もっと読む)
情報処理装置、情報処理方法および情報処理プログラム
【課題】発光ダイオードを用いて判定される特定人に所定の事項を出力する。
【解決手段】 情報処理装置10は、LED130が周囲の光を吸収することによりLED130に発生する起電圧Veを測定する測定器135と、測定器135により測定された起電圧Veと予め定められた閾値Sthとを比較する比較部150と、その比較結果に基づきLED130に近づいたものが所定の特定人か否かを判定する判定部155と、判定部155により特定人と判定された場合、判定された特定人用に予め定められた所定の事項をその特定人に対して出力する出力部160とを有する。
(もっと読む)
玩具
【課題】 加速度センサによって検出された加速度に基づいて無重力状態を検出し、無重力状態を入力の一つとして利用する玩具を実現する。
【解決手段】おしゃべり人形1100は、ヌイグルミ状の人形本体1190の中に、直交3軸の加速度を検出する加速度センサ1248とスピーカ1254とコントローラ制御ユニット1160とを備えた電子制御装置1130を内蔵する。電子制御装置1130は、加速度センサ1248で検出する加速度が3軸とも「ゼロ」で有る場合に無重力状態に有ると判定し、スピーカ1254から音声出力するように制御する。
(もっと読む)
脚式移動ロボット
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
コミュニケーションロボットとその動作方法
【課題】サービスを依頼し易いコミュニケーションロボットを提供する。
【解決手段】眼カメラ20が設けられた頭部52と、広視野カメラ53が設けられた胴部54と、頭部を回転させる頭部制御手段61と、コミュニケーションの成立を合図する合図動作制御手段63とを有するコミュニケーションロボットであって、眼カメラ20及び広視野カメラ53の画像を処理する画像処理手段62を有する。頭部52を所定速度で回転する見回り動作を行いながら、広視野カメラ53の画像から予め検出した人の位置で回転速度を落とし、眼カメラ20の画像からロボットに顔を向ける正面顔の人を検出し、検出した場合に合図を送る。サービスを求める人は、ロボットが見回り動作を行っていれば、サービス可能であると知ることができ、ロボットが自分の方を向いたときにロボットを見ていれば、ロボットにサービスを依頼できる。
(もっと読む)
無線タグ
【課題】 分別廃棄が容易な無線タグを提供する。
【解決手段】 アンテナ14にICチップ11を搭載したインレイと、前記インレイの表面に第1の粘着材層13を介して形成される表層12と、前記インレイの裏面に形成される第2の粘着材層15と、前記インレイの縁辺部に前記第1の粘着材層13と前記第2の粘着材層15が接する部分を有し、前記第1の粘着材層13と前記第2の粘着材層の粘着強度15が、表層12と第1の粘着材層13の粘着強度よりも弱く、前記第1の粘着材層13と前記アンテナ14との粘着強度よりも、前記アンテナ14と前記第2の粘着材層15との粘着強度が弱く、第1の粘着材層13とアンテナ14の粘着強度が、第1の粘着材層13と表層12の粘着強度よりも弱いように無線タグ18を構成し、アンテナ14とICチップ11の分別を容易にする。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラム
【課題】プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる動的反応プレゼンロボット、動的反応プレゼンロボットの制御方法及び制御プログラムを得ることを目的とする。
【解決手段】資料の説明を受けている来場者の反応量を測定する反応量測定部2を設け、身体制御部3が反応量測定部2により測定された反応量に応じて身体を制御する。これにより、プレゼンターから資料の説明を受けている来場者の反応に合わせて、身体を制御することができる。
(もっと読む)
1 - 20 / 42
[ Back to top ]