
Fターム[2C150EF15]の内容
Fターム[2C150EF15]の下位に属するFターム
Fターム[2C150EF15]に分類される特許
1 - 15 / 15
鉄道車両玩具
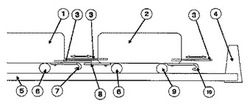
【課題】簡易な壁面または次両目車両へ衝突または接触することによって前進と後進の進行方向を逆転させる機能を有する事を特徴とする鉄道車両玩具を提供する。
【解決手段】本発明は以上のような構造である、1駆動モーター及び前後進逆転機付き先頭車両に、3前後進逆転機連動用の切り替スイッチの組み合わせを実現した前後進逆転機能を設けたことを特徴とする。
(もっと読む)
コマンド認識装置、コマンド認識方法、及びコマンド認識ロボット

【課題】ユーザが意図した場合に発話によりロボットの動作を制御するためのコマンドを認識する、コマンド認識装置、コマンド認識方法及びコマンド認識ロボットを提供する。
【解決手段】発話情報から単語列情報を決定又は選択する発話理解部21と、前記発話情報と前記文に基づいて音声確信度を算出する音声確信度算出部221と、画像情報と前記文に含まれる語句情報に基づいて語句確信度を算出する語句確信度算出部22と、音声確信度及び語句確信度に基づいて、前記単語列情報のコマンドを実行するか否かを判断する動作制御指示部225とを備える。
(もっと読む)
アド・クラフトペーパー
【課題】ビラなどの紙媒体の二次利用を目的とすることに加え、受取人にQRコードの発見のしやすさ、受取人をHPへ誘導することを容易にさせること、そして広告の認知から購買までの距離を縮めること、以上が開発の目的である。
【解決手段】紙媒体の裏面(表面)にペーパークラフトとQRコードを印刷すること。
(もっと読む)
スポーツ競技におけるスタート標示灯システム
【課題】観戦者が出場選手と反射神経の俊敏さを競いたいとの潜在的願望が満たされていない従来スポーツ競技の問題点を解決すること。
【解決手段】スポーツ競技開始の合図となるスタート合図標示灯とそれに反応してスタート動作を起こす出場選手達のスタート動作に連動して点灯するスタート動作標示灯とを観戦者が同一画像内に写真撮影できるよう設置することにより、観戦者が自らスタート合図標示灯に反応しシャッターボタンを押下して撮影した写真画像のスタート合図標示灯とスタート動作標示灯の点滅状態で自分の反射神経の俊敏さを出場選手達と比較できるようにして、この課題を解決する。
(もっと読む)
ロボット
【課題】 ロボットとの対話時に、ユーザがメモとして記録しておきたい部分を自動的に記録し、ユーザがロボットとの対話時に発する音声を基にメモを自動的に再生することにより物忘れ防止が可能なロボットの提供
【解決手段】 ロボットとモニタ対象者の対話中にメモ処理部31は、対話処理部24から正規化されたモニタ対象者の入力音声を取得する。メモ登録処理部31−1は入力音声と登録用キーワードが一致するとそれに続く音声をメモ音声としてメモ音声登録メモリに登録する。また、メモ再生処理部31−2は、入力音声が再生用キーワードと一致するとメモ音声を再生する。また、入力音声が停止用キーワードと一致するとメモ音声再生を停止する。
(もっと読む)
ロボット、音声変更方法及び音声変更プログラム
【課題】ユーザから提示される物体を視覚で認識して言葉を覚えるロボットを提供する。
【解決手段】ロボットはまず、ある対象を想定してそれを示すランダムな音声を発する。ユーザはそれに対して物体を提示し、提示された物体が想定した対象であるならば、ロボットは歓喜の声をあげ、ユーザはその物体が望みの物体であることを知る。次に、ロボットは、同じ言葉を発するが、その言葉がユーザが対象としてふさわしくない場合は物体を提示しない。するとロボットは別の言葉を発し、ユーザが言葉が希望する言葉に近づいたと判断した場合に物体を提示する。これを繰り返すことで、望みの言葉に近づける。そして最終的に2回連続する同じ言葉に対して物体を提示することで言葉を確定させる。
(もっと読む)
ロボット用触覚センサ装置
【課題】弱く接触しても検知することができるとともに、センサをロボットのカバーに取り付けることができることを可能にする。
【解決手段】ロボット40の本体の周囲を覆うカバー50を振動させるアクチュエータ4と、カバーに取り付けられカバーの振動を検出するセンサ5と、アクチュエータを一定の条件で振動をするよう制御する振動制御部3と、アクチュエータにより与えた振動とセンサにより検出された振動とを比較しカバーへの接触の有無を検出する接触検出部2と、を備えている。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10は、スピーカ54、マイク56および眼カメラ60を含み、たとえば、或る会社など、噂が発生し流される場所に配置される。人間14は、たとえば気になる噂があると、端末106からネットワーク100を介してサーバ102にアクセスし、噂登録掲示板を介して当該噂を登録する。当該噂は、噂DB104に記憶(登録)される。コミュニケーションロボット10は、噂DB104から噂を読み出し、当該噂に含まれる情報に基づいて自律移動し、当該噂の検証情報をカメラ60やマイク56を用いて取得する。たとえば、コミュニケーションロボット10が配置された場所に存在する各人間12に所持等させた無線タグ16からの識別情報と噂に含まれる情報とに基づいて噂の当事者12を特定し、当該当事者12に対して噂に関する取材を行う。取材等によって取得した噂の検証情報は、サーバ102に送信され、噂DB104に登録される。登録された当該検証情報は、たとえば噂検証結果掲示板を介して人間14等に開示される。
【効果】 噂に基づく人間の不安や疑問を解消させ、また好奇心を満足させることができる。
(もっと読む)
発音玩具
【課題】 歌唱や伴奏に合わせて動き、カラオケも楽しめる人形を提供することで、飽きることのない玩具を提供する。
【解決手段】 駆動機構を有する人形と、前記人形と一体とされる音声合成装置本体とスピーカ、前記音声合成装置本体内部に設置される音声混合回路から構成され、前記音声合成装置本体はスピーカとハンディマイクとが接続可能であり、前記音声混合回路は、マイク端子から入力されたアナログ信号とオーディオ端子から入力されたアナログ信号をミキサー回路により重ね合わせ、メインアンプを通してから人形の足部に設置されたスピーカから拡声するものであり、ドライバにより駆動機構の動力源への電圧の印加を行い、駆動機構により人形を動作させる発音玩具とするものである。
(もっと読む)
コミュニケーションロボット
【課題】視線移動に際して眼球だけでなく首(頭部)も回転し、視線の演出によってコミュニケーションロボットの意図を伝達するときの視線の動きがごく自然で、ロボットの意図を確実に表現できるロボットを提供する。
【解決手段】コミュニケーションロボット10では、頭部64は所定軸たとえば鉛直軸(S軸)周りに回転できる首を介して設けられ、その頭部には、同じく鉛直軸周りに回転できる眼球48が設けられる。CPUは、注視対象者に視線を移動するとき、眼球による視線の移動に対する首の寄与率(A1)を設定し、寄与率に従って計算した首の関節角度θおよび眼球の関節角度αに基づいて首および眼球を制御する。
(もっと読む)
植物コミュニケーション装置
【課題】 植物とのコミュニケーションを、確実かつ実用的に実現可能とする。
【解決手段】 植物10,用土20,容器30のいずれかに取り付けられた第一電極40と、この第一電極40に高周波電圧を印加する高周波電源50と、この高周波電源50の接地側を接地する第二電極60と、この第二電極60と高周波電源50との間に接続された検出手段70aと、負荷90を動作させる負荷制御手段80とを備え、検出手段70aは、人体が植物10に接近又は接触した場合としない場合との戻り電流の変化を検出し、負荷制御手段80は、人体が植物10に接近又は接触した場合に負荷90を動作させる。
(もっと読む)
音響を発生する飛行遊具
【課題】本発明は音を発生する飛行遊具を提供することを目的とする。
【解決手段】飛行遊具に音源メモリ、制御機構、変換器、スピーカ、電池から構成する音響発生手段を搭載する。
(もっと読む)
ロボット装置
【課題】 低コストで、しかも従来よりCPUやメモリに掛かる負荷を軽減して、対象物を追跡することが可能なロボット装置を提供する。
【解決手段】 所定の行動面上を行動するロボット装置であって、対象物を含む視野からの入射光を前記行動面と略平行な方向に集光する集光レンズ12と、集光された光を受光して信号に変換する複数の光電変換素子とを有するカメラユニット部と、
前記複数の光電変換素子からの出力信号に基づいて対象物の方位を求め、当該方位に応じた方向に前記カメラユニット部を向ける行動を生成する行動生成部とを備える。
(もっと読む)
脚式移動ロボット
【課題】 足部に設けられる床反力検出器の小型化・軽量化が可能な脚式移動ロボットを提供する。
【解決手段】 6軸力センサの中心Pbは、ロボットの起立静止状態において平面視で板バネ部S1〜S4の底面側に設けられた接地領域のうちの最遠点までの距離が最小となる位置Pa上に設けられており、平面視で6軸力センサの中心Pbから各板バネ部S1,S2,S3,S4の底面の接地領域それぞれの最遠点までの距離L1,L2,L3,L4が等しくなっている。そして足首関節の中心Pcは、平面視で位置Paに対して後方にオフセットしている。
(もっと読む)
ロボット用関節装置
【課題】 関節装置のロボットの各関節部への共用化を可能にし、関節軸のハンチングをなくし、位置センサーのゼロ点調整及び位置センサーの作動角の変更を可能にする。
【解決手段】 ハウジング本体11を結合部材で結合した第1及び第2収容体111,112から構成し、この第1及び第2収容体111,112の他端間には関節軸12を差し渡し状態にして回転可能に設け、第1収容体111に設けられたモータ16の回転を第1収容体内に配設された減速機構17を通して関節軸12に伝達し、関節軸11に固定した連結ブロック13を利用して別構成の関節ユニットとの結合を可能にし、さらに、第2収容体112に設けた回転角変更機構19により関節軸の回転角度に対する作動角を変更して位置センサーに伝達する構成にした。
(もっと読む)
1 - 15 / 15
[ Back to top ]