
Fターム[2C150EF21]の内容
Fターム[2C150EF21]の下位に属するFターム
重力又は自重 (33)
圧力 (40)
磁気 (19)
電荷 (7)
電気抵抗 (11)
電圧又は電流 (18)
熱(温度差を含む) (26)
音又は声 (102)
超音波 (11)
光 (118)
電波 (88)
反射を利用 (10)
水 (18)
Fターム[2C150EF21]に分類される特許
1 - 9 / 9
化粧玩具および化粧玩具用装着体
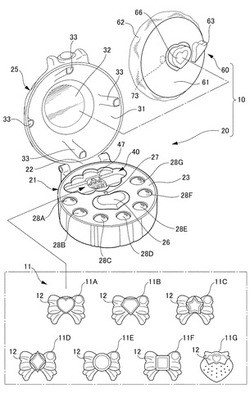
【課題】 より多くの種類の演出を楽しめると共に、より面白い演出を楽しむことができる化粧玩具および化粧玩具用装着体を提供する。
【解決手段】 化粧玩具10は、化粧料容器を模した玩具本体20と、化粧用パフを模して形成され玩具本体20に収納可能な模型体60と、を有してなり、識別情報を有する装着体11が玩具本体20に装着可能なものである。玩具本体20は、装着体11が着脱される着脱部40と、着脱部40に装着された装着体11の識別情報を検知する突起検知部47と、を有する。模型体60は、突起検知部47により取得された識別情報に基づいて発光する発光部73を有する。
(もっと読む)
遠隔操作ロボット

【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
懐く挙動を示す玩具
ユーザーに懐く挙動を示す玩具、およびそのような挙動をシュミレートする方法が提供される。玩具は、ユーザーからの対話的入力を受ける入力センサ(18)と、ユーザーとコミュニケートする出力装置(24)と、プロセッサ(12)と、機械語命令を格納したメモリ(16)と、を備える。機械語命令により、プロセッサ(12)は、対話的入力を受け取り、受け取った入力信号を処理し、制御信号を出力装置に送る。プロセッサ(12)は、受け取った入力信号をポジティブまたはネガティブに分類し、当該分類に従ってメモリ(16)に記憶・蓄積された入力信号を調整する。制御信号は、蓄積された入力に依存している。 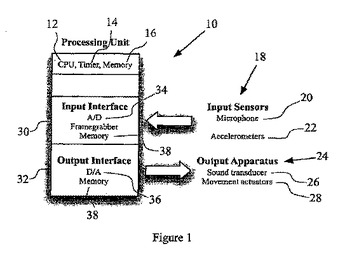 (もっと読む)
(もっと読む)
合体玩具
【課題】 合体による形状変化に基づき合体玩具を性能変化させるとともに、ユーザーのオリジナルな商品に変化させる。
【解決手段】 主体部と複数の副体部からなる合体玩具であって、主体部は副体部と合体するための接合部と、副体部との合体により性能変化を受けるための認識部および表示部とを備え、一方、副体部は主体部と接合するための接合部と、主体部に性能変化を与える情報手段とを有し、合体により主体部に性能変化が表示される。
(もっと読む)
ゲーム媒体、ゲーム機及びゲームシステム
【課題】情報特定の利便性を向上し、汎用性を向上したゲーム媒体、及び、このゲーム媒体の情報を書き替えるゲーム機、ゲームシステムを提供する。
【解決手段】パーツ11〜17に、ゲームに登場するキャラクタの一部分の形態、能力値の情報が記憶されたRFIDタグ21〜27をそれぞれ内蔵し、ゲーム機40のタグリーダ・ライタ42を用いてRFIDタグ21〜27の情報を読み出して、キャラクタの全体の形態、能力値を決定し、また、ゲームの進行に応じて、タグリーダ・ライタ42を用いて、RFIDタグ21〜27の情報を書き替える。
(もっと読む)
脚式移動ロボット制御装置および脚式移動ロボット、並びに、脚式移動ロボット制御方法
【課題】オペレータの操作なしに、特定箇所に物を水平に載置することができ、腕部の伸張可能な範囲の制約が軽減された高さの特定箇所に物を載置することができる脚式移動ロボット制御装置および脚式移動ロボット、並びに、脚式移動ロボット制御方法を提供する
【解決手段】脚式移動ロボット制御装置1は、複数のリンクから構成される、物を把持する腕部および移動するための脚部が、上体部に連結される脚式移動ロボットを、この脚式移動ロボットRの姿勢および各リンクの位置に関する姿勢位置データと腕部R3に作用する外力に関する外力データとに基づいて、制御するものであって、データ取得手段3と、全身協調制御手段5と、載置判定手段7と、を備える構成とした。
(もっと読む)
アドオン装置へのインターフェイスに関する方法及びシステム
子供の玩具として実施化されることが可能である方法及びシステム10が記載される。当該システム10は、システム10によってホストされる相互作用的な環境へアドオン装置20a又はストーリをインターフェイスするように動作可能である。システム10は、システム10へ導入されたアドオン装置から通知225を受信するように動作可能である応答エンジン30を有する。応答エンジンは、アドオン装置20aへのチャレンジ235を生成するように動作可能であり、前記チャレンジは、埋め込まれた透かしを含む。応答エンジン30は、アドオン装置20aからチャレンジ235に応答して送信された対応する応答を受信するように動作可能である。更に、応答エンジン30は、アドオン装置20aが前記対応する応答を生成する際にチャレンジ235から正確に透かしを抽出することが可能であるか否かを決定するために、前記対応する応答を分析するように更に動作可能である。当該システム10は、これにより、システム10へ新しい装置20aを受け入れることが選択的に可能であり、これにより、システム10を用いて使用される偽造品又は複製品を防ぐことが可能である。 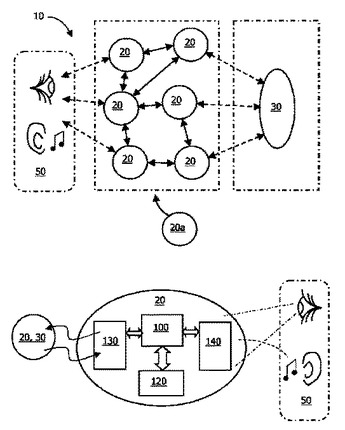 (もっと読む)
(もっと読む)
ロボット、ヒント出力装置、ロボット制御システム、ロボット制御方法、ロボット制御プログラム及び集積回路
従来から、利用者を識別し、利用者毎に異なる行動パターンを取るペットロボットや、ペットロボット自身の行動履歴に基づいて、段階的に行動パターンを変化させ、成長の過程を演出するペットロボットが存在する。 本発明は、メモリカードを所持した利用者と接する際に、メモリカードから、メモリカードの識別情報、利用者に関する情報、利用者がロボットに接した履歴情報など、各種の情報を取得し、取得した情報を反映したする行動をすることで、利用者に、より高い満足感を与えることができるロボットを提供する。 (もっと読む)
1 - 9 / 9
[ Back to top ]