
Fターム[2C150EF22]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 重力又は自重 (33)
Fターム[2C150EF22]に分類される特許
1 - 20 / 33
ロボット装置、ロボット制御方法、ロボット制御プログラム、およびロボットシステム
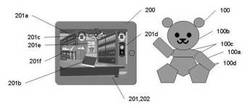
【課題】ユーザーへの情報の表現力を向上させるとともに、ユーザーの関与によって表現内容を変化させるロボットシステムを提供する。
【解決手段】ロボットと映像表示端末の組み合わせにより、現実のサービスを寸劇表現することで、ユーザーによる機能発見と感情移入を容易にしてユーザーへの情報の表現力を向上させるとともに、得られるユーザー属性と環境属性を反映し表現内容を変化させることでユーザーが飽きさせないようにする。
(もっと読む)
ロボット、状況認識方法および状況認識プログラム

【課題】各種のセンサを用いずにロボットが保持されている保持状況を認識することを課題とする。
【解決手段】ロボット1は、ロボット1の各部位間を接続する関節に設けられた複数のサーボモータ33P、33R、33Y、35R、35L、37R及び37Lを有する。さらに、ロボット1は、各サーボモータ33P、33R、33Y、35R、35L、37R及び37Lのトルクを用いて、ロボット1の部位に対する拘束状況を検知する。
(もっと読む)
フライングディスク
【課題】飛翔体として遊戯者が投げ合うことのできるフライングディスクであって、熟達者でなくても有る程度の飛距離を出すことができ、水平移動のスピードが落ちた場合にゆっくりと下降してキャッチがしやすいフライングディスクを提供すること。
【解決手段】中央に開口を設けた上壁部および当該上壁部の外周囲に下方に向かう湾曲面若しくは傾斜面を形成した円盤本体と、前記開口の中央部に配置されたプロペラおよび当該プロペラを回転させる駆動装置と、前記プロペラの回転によって生じる下降気流を受けて円盤本体に回転力を付与するように、前記プロペラとは異なる角度で取り付けられた翼状部材を設けたことを特徴とするフライングディスク。
(もっと読む)
玩具
【課題】玩具を提供すること。
【解決手段】無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。
(もっと読む)
遠隔制御機器の駆動制御装置
【課題】模型ヘリコプタの駆動制御装置において、機体がヨー軸に対して回転運動をおこなっている場合でも、ロール軸およびピッチ軸の位相のずれに影響されずロールとピッチの操作が行える。
【解決手段】駆動制御装置は、ヨー軸角速度検出手段とメインロータ回転数検出手段を備え、これらの検出値から位相制御手段において、ヨー軸に対する回転運動によるロール軸およびピッチ軸の位相のずれ量を求め、ロール操作信号およびピッチ操作信号を補正して、ロールおよびピッチの制御を行うことができる。
(もっと読む)
組み立て方認識機能を備えた玩具ブロックシステム
【課題】ブロック遊びに関して子供の発育段階を簡易かつ的確に判定する玩具ブロックシステムを提供する。
【解決手段】遊戯端末装置と、該遊戯端末装置に通信ネットワークを介して接続されるサーバとで構成され、遊戯端末装置で検出されたブロックの形状・設置場所・時間の情報を、前記サーバに送信し、前記サーバは、その記憶部に格納された情報を参照して、前記遊戯端末装置から送信された前記ブロックの情報に基づいて、前記利用者の発育段階を解析し、前記解析された発育段階を表示するための情報を生成する。
(もっと読む)
シート状玩具
【課題】車玩具の通過を検知したときの状況等に応じて出力する音声を制御することで、遊び方にバリエーションを持たせることが可能なシート状玩具を提供する。
【解決手段】表面に車玩具を走行させて遊ぶための道路A及び駐車スペースBが描かれたシート状玩具10であって、前記道路A及び前記駐車スペースBの上を車玩具が通過したことを検知するための複数の検知部15を備えた通過検知手段14と、音声を出力するためのスピーカ12と、シート状玩具10全体の作動を制御するための制御装置100と、を備え、前記制御装置100は、予め複数の音声データを記憶した音声記憶手段120と、前記通過検知手段14が車玩具の通過を検知したときに、前記音声記憶手段120が記憶する複数の音声データから1の音声データを選択する音声選択手段130と、前記音声選択手段130が選択した音声データを前記スピーカ12に対して出力するスピーカ制御手段140と、を備えるようにした。
(もっと読む)
送信コントローラ用補助ユーザーインターフェース
【課題】送信コントローラにコンポーネントを拡張的に追加することなく、送信コントローラに、より良好なユーザーインターフェースを提供する。
【解決手段】補助ユーザーインターフェースデバイスと互換性のある送信コントローラは、作動パラメータを記憶するメモリと、制御ユーザーインターフェースと、補助ユーザーインターフェースコネクタと、送信コントローラプロセッサとを有する。送信コントローラプロセッサは、補助ユーザーインターフェースデバイスに作動パラメータに送信し、補助ユーザーインターフェースデバイスからのパラメータ命令に従って作動パラメータを変更するようになっている。
(もっと読む)
視覚的力表示器並びに視覚的力理科教材及び科学玩具
【課題】使用する際の向きの制約を受けることなく、作用している力の向きと大きさを視覚的に表示できる力表示器を提供することを目的とする。
【解決手段】3軸加速度センサ20から取得するx軸方向、y軸方向及びz軸方向の加速度に基づいて、軸方向の各々について、3軸加速度センサ20に作用する重力以外の力に対応する短周期加速度値(Sx、Sy及びSz)及び3軸加速度センサ20に作用する重力に対応する長周期加速度値Lx、Ly及びLzを求める。次いで、短周期加速度値(Sx、Sy及びSz)及び長周期加速度値Lx、Ly及びLzに基づいて、軸方向の各々について表示情報を生成する。この表示情報に基づいて軸方向に作用する力の向きと大きさを表示する。
(もっと読む)
脚式移動ロボット
【課題】足首部のコンパクト化が可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、下腿リンク34に設けられ、ピッチの方向に揺動可能な揺動部材52と、下端54aが揺動部材52の前端52bに連結された前側ロッド54と、上端56aが揺動部材52の後端52cに連結され、下端56bが足首関節の揺動軸線より後方にて足平22に連結された後側ロッド56と、前側ロッド54を駆動するアクチュエータ58と備える足首関節駆動機構50を有する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。 足首関節はピッチ方向に回転するピッチ回転軸部18R(L)を有し、ピッチ回転軸部ピッチ回転軸部18R(L)の軸線が、左右方向内側が外側より低くなるよう傾斜する。
(もっと読む)
ロボット
【課題】 軽量、安全かつ優れた制御性能を共に達成することができるロボットを提供することを目的とする。
【解決手段】 本体1と、3自由度変位できる肩関節部2と、上腕リンク3と、2自由度変位できる肘関節部4と、前腕リンク5と、を備え、すべてのアクチュエータが前記本体1に設置され、前記アクチュエータが4本以上の一関節筋11〜14を介して前記肩関節部2と前記上腕リンク3とを駆動し、3本以上の二関節筋15〜17を介して前記肘関節部4と前記前腕リンク5とを駆動する。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
回転翼無人機用のナビゲーション電子カード支持体
本支持体300は、機械的振動を吸収する材料によって形成される機械的インターフェース310を介して、無人機内に設けられているハウジング内に固定されるように設計されている。環状形状の機械的インターフェースは、ハウジング内に設けられている対応する環状肩部上にフィットするように設計されている。ハウジング内のホルダーの固定部301は、少なくとも1つの接続支柱302がナビゲーション電子カード320を支持しているとともに該固定部の一端に自由に取り付けられている状態で、機械的インターフェース310を支持する。無人機用の電源バッテリー400もホルダー内に収納される。ナビゲーション電子カードは特に、無人機の重心に位置決めされるように該カードに配置される、加速度計のようなナビゲーションセンサー321を含むことができる。 (もっと読む)
外付け式人間型手のためのアクチュエータおよび電子機器のパッケージング
【課題】外付け式人間型手のためのアクチュエータおよび電子機器のパッケージングを提供すること。
【解決手段】人間型ロボット用の下腕アセンブリは、第1の側および第2の側を有する腕サポートと、腕サポートの第1の側に取り付けられる複数の手首アクチュエータと、腕サポートの第2の側に取り付けられる複数の指アクチュエータと、腕サポートの第1の側にやはり配置される複数の電子機器とを備える。
(もっと読む)
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具は、ユーザから入力された音声に応えて、話し、歌い、動き、踊る能力を有する。予めプログラムされたパラメータと、各種センサからのリアルタイム入力との組合せに基づいて玩具の動きおよびそれに伴う音を制御およびカスタマイズするために、各種モータ、アクチュエータ、マイクロフォン、スピーカ、および集積回路手段が用いられる。玩具は、高度なインタラクティブ性、ならびにユーモア、自発性、および予測不可能性をユーザに提供する。 (もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
頭部運動による入力装置及び方法
【課題】ロボットや無線操縦機器などの産業・娯楽機器や、電動車椅子や電子文字盤などの福祉機器を直観的なインターフェースで操作することが望まれているが、習得が難しい問題や、利用制約が大である問題があった。
【解決手段】操作者のジョイスティック的な頭部運動を検出する傾斜センサ等を、頭部に装着し、ヘッドマウントディスプレイ等で表示することにより、直観的なインターフェースで、外部機器や仮想空間の物体を操作できる。
(もっと読む)
脚式移動ロボット
【課題】 構造が簡素であり低コストに足部の爪先部を形成することができる脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボット1は、上体3と、上体3に関節を介して駆動可能に連結される2本の脚部2と、脚部2の先端に関節を介して駆動連結に連結される足部22とを備える。足部22は、足部22の接地端である足平部100を有し、足平部100の爪先110から一定間隔離れた部位に、横全体に亘って爪先部102の厚みより薄い屈曲部112を形成し、屈曲部112は、足平部100の前後方向に所定の幅を有する溝114からなり、溝114は、足平部100の前後方向の幅が爪先部102の後端から前端に向かって爪先部102の中間まで延びて形成されている。
(もっと読む)
クッキング玩具
【課題】総合的に料理全体を、料理の手順に合わせて子供が楽しみながら学ぶことができる仮想調理を行うことが可能な音声又は画像処理システムを提供する。
【解決手段】仮想調理を行うための遊戯に使用される音声又は画像処理システムであり、異なった形態の仮想調理を各々行う複数の入力装置11、12、13及び14と、各々の入力装置11、12、13及び14から入力されたデータに基づいて、各入力装置11、12、13及び14に対応する音声又は画像処理を行い、その結果を出力再生装置4に出力する音声又は画像処理装置3と、を備えた。
(もっと読む)
1 - 20 / 33
[ Back to top ]