
Fターム[2C150EF23]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 圧力 (40)
Fターム[2C150EF23]に分類される特許
21 - 40 / 40
オンライン対戦型メンコゲーム機
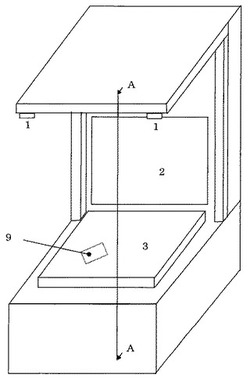
【課題】従来のメンコは、同じ場所に対戦者が居なければ対戦できなかった。また、メンコを使用したコンピュータゲームがなかった。また、メンコ等の玩具(アナログ玩具)とテレビゲームのような玩具(デジタル玩具)が融合した玩具がなかった。
【解決手段】メンコ対戦中に発生する力をデジタル化して、エアーコンプレッサ等の機械によって再現し、ネットワーク化することで、コンピュータ対戦・オンライン対戦が可能となり、対戦者がその場に居なくても対戦することができる。対戦マットに圧力センサが組み込まれており、メンコが叩きつけられた時に生じる圧力を圧力情報として検出する。ネットワークを介して、圧力情報とメンコが保持している情報を送信する。このデータを基にエアーコンプレッサを利用し、エアー噴出し口から空気を放出することでメンコを裏返させる力を加える。対戦者のメンコはプロジェクタを使用し対戦マットに投影することとする。
(もっと読む)
管楽器演奏装置および管楽器の自動演奏方法

【課題】管楽器からの音の音色や音程の再現性を高めることを可能とする、管楽器の演奏装置・管楽器の自動演奏方法を提供すること。
【解決手段】リードを備えた管楽器のマウスピースに取り付けられる管楽器演奏装置において、空気をマウスピースに導く流路と、流路内を流れる空気流量を調節する流量調整部と、接触部材がリードに対して接触する箇所を変更する位置変位部と、接触部材の押圧方向について定められる接触部材の基準位置と、接触部材がリードを押圧する押圧力を対応させた対応データを記憶する記憶部と、接触部材がリードに接触して押圧する際に生じる目標押圧力を特定する目標押圧力特定部とを設け、位置変位部を記憶部の対応データに基づき目標押圧力特定部により特定された目標押圧力に対応する接触部材の目標位置に基づき接触部材の位置を変位させるように制御した。
(もっと読む)
動作玩具
【課題】玩具の小型化に適し、かつ、回動体の円滑な動作を損なわない検知機構を持つ動作玩具を提供すること。
【解決手段】回動体が付設された軸を備える動作玩具において、前記軸に接触した前記回動体の回転に伴って発生する軸振動を検知し該軸振動に応じた電気信号を出力する圧電素子と、所定の動作を行う動作手段と、前記圧電素子からの電気信号に基づいて前記動作手段に所定の動作を行わせる制御手段と、を備えることを特徴とする。
(もっと読む)
羽ばたき飛行機
【課題】複雑かつ重量な駆動制御回路装置を要することなく、回転モータを高速回転駆動して大出力を得るとともに、回転モータが出力する大出力を大きな機械的損失を伴うことなく羽ばたき運動に変換することにより、パワー伝達効率に優れ、加えて高い羽ばたき振動数で羽ばたき運動することにより機敏な高機動飛行をすることができる優れた羽ばたき飛行機を提供する。
【解決手段】共振型羽ばたき飛行機において、羽ばたき翼がフラッピング振動およびフェザリング振動の2自由度において連成共振振動する翼振動系を構成し、フラッピング振動支軸で軸支された羽ばたき翼により円周方向に慣性力を発生する振動モータを支持して設け、前記振動モータが発生する慣性力によりフラッピング振動トルクおよびフェザリング振動トルクを得る。
(もっと読む)
反応出力装置
【課題】ユーザを識別して、そのユーザの動作から受ける印象に応じて反応を出力できる反応出力装置を提供する。
【解決手段】反応出力装置1では、好悪の程度を数値で表現した好悪判定値を用いることによって、ユーザ毎に好悪の程度を記憶できる。この好悪判定値はユーザ毎にそれぞれ設定され、反応出力装置1に対して行われるユーザの所定の動作の種類によって、そのユーザに設定された好悪判定値のみが更新される。この好悪判定値の更新は、ユーザの動作の種類毎に各々設定された好悪値が、好悪判定値に加算(又は減算)されることによって行われる。そして、好悪判定値のレベルに対応して香りの種類がそれぞれ設定されている。よって、ユーザの好悪判定値に対応する特定の香りが香り放出口11からユーザに提示されることで、反応出力装置1のユーザに対する好悪の程度をそのユーザに提示できる。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10はアンテナ58を含み、RFIDタグ12、14および16から送信されるかつRFIDの情報を重畳した電波を受信する。ユーザA、BおよびCは、それぞれ、タグ12,14および16を所持または装着している。したがって、ロボット10は、RFIDの情報を取得して、その近傍或いは周囲に存在するユーザA、BおよびCを認識する。また、ロボット10は、RFIDの情報を取得した際の電波強度から最近傍に存在するユーザを特定し、当該ユーザに対してコミュニケーション行動を取る。
【効果】 近傍或いは周囲に存在するユーザを個別に認識することができ、特定したユーザに適したコミュニケーション行動を取ることができる。
(もっと読む)
音響を発生する飛行遊具
【課題】本発明は音を発生する飛行遊具を提供することを目的とする。
【解決手段】飛行遊具に音源メモリ、制御機構、変換器、スピーカ、電池から構成する音響発生手段を搭載する。
(もっと読む)
表情付け音声発生装置
【構成】 表情付け音声発生装置10は、コンピュータ22を含み、このコンピュータは、手人形(12)を操作する手に装着する手袋型センサ(14)に設けられるセンサ161a‐164,181および182からのセンサ値に基づいて、解釈テーブル24を参照して、その手人形のジェスチャを同定し、そのジェスチャを、ジェスチャ−表情対応テーブル26を参照して、モーフィング点(モーフィング率)にマッピングする。そのモーフィング率に従って、歌声データベース28に予め蓄積されている元歌声(normal, dark, whisper, wet)をモーフィングして、スピーカ34から発音する。この手は手人形の反り返りの程度で音量を制御する。
【効果】 ジェスチャによって音声モーフィングを制御することができる。
(もっと読む)
玩具
無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。第2の玩具(12)のある所にある第1の玩具(10)からの第1の表現応答をアクティブにするステップと、前記第1の玩具(10)から前記第2の玩具(12)に、前記第1の表現応答を示すトリガーデータを送信するステップと、前記第2の玩具(12)が、前記データを受信した際に、メモリ(34)から第2の表現応答を選択し、前記第2の表現応答をアクティブにし、前記第1の玩具(10)に対する前記第2の表現応答を示すトリガーデータを送信するステップとを含むことを特徴とする第1(10)及び第2(12)の玩具間の交信の方法が提供される。 (もっと読む)
音声発生玩具
【課題】音声発生玩具に於いて、容易に携帯可能で、場所を問わずに音声を発出し得る音声発生玩具を提供する。
【解決手段】感圧スイッチ13を備えた複数の無線タグユニット12a〜12jを任意の位置に配し、使用者が感圧スイッチ13を押圧することによって、該無線タグユニット12a〜12jを特定する為の個別情報を受信部16に無線送信する。受信部16は該個別情報に基づいて受信部側記憶部17に格納された音声データを発出する。
(もっと読む)
電子神経部品、電子頭脳、及び、ロボット
【課題】専門的な知識を持たない一般人や若年者にも理解され易く、製作や変更が容易で、且つ、従来よりも生命らしい構造を備える電子頭脳を構成する電子神経部品を提供する。
【解決手段】電子頭脳を構成する複数の電子神経部品のうちの1つであって、論理回路を搭載した論理演算素子111を含み論理演算素子及びその周辺をフレキシブルな部材112で取り囲んでいる1つの胴体110と、論理演算素子に接続された入力線121を含み入力線及びその周辺をフレキシブルな部材122で取り囲んでいる1つ以上の入力触手120と、論理演算素子に接続された出力線151を含み出力線及びその周辺をフレキシブルな部材152で取り囲んでいる1つ以上の出力触手150とを備え、入力触手から入力された信号に基づいて論理演算素子で演算された演算結果が出力触手から出力される。
(もっと読む)
脚式移動ロボットの脚体関節アシスト装置
【課題】小型且つ簡単な構成でロボットのエネルギー消費を低減しつつ、脚体の関節アクチュエータの負担を軽減することができる脚体関節アシスト装置を提供する。
【解決手段】アシスト装置11はばね手段21(気体ばね)を備えており、シリンダ23内のピストン24がロボットの脚体3の膝関節8における大腿部4および下腿部5の相対的変位運動(屈伸運動)に応じて上下動する。ピストン24の上下の気室25,26に気体が充填されている。膝関節8での曲げ度合いが所定値以下であるときには、気室25,26がシリンダ23内の溝28を介して連通して、ばね手段21は弾性力を発生せず、曲げ度合いが所定値を超えると、気室25,26が互いに密封状態となってばね手段21が弾性力を発生し、その弾性力が膝関節8に補助駆動力として作用する。
(もっと読む)
脚式移動ロボットの力センサ異常検知装置
【課題】床反力を検出する力センサの異常を精度良く検知するようにした脚式移動ロボットの力センサ異常検知装置を提供する。
【解決手段】脚式移動ロボットにおいて、ロボットを起動させるときに足踏み動作を行なうようにロボットの動作を制御し(S104)、足踏み動作のときの力センサの出力が所定の範囲内にあるか否か判定し(S106,S108,S110,S112,S114)、その判定結果に基づいて力センサの異常を検知する(S102)。
(もっと読む)
脚式移動ロボット
【課題】足部に帯電する静電気を効果的に放電して除去するようにした脚式移動ロボットを提供する。
【解決手段】基体と、2本の脚部と、そのそれぞれの先端に足関節を介して連結される足部22と、足部22と脚部の間に配置されて足関節を駆動する電動モータ20と、足部と脚部の間に配置されて足部22が接地する床面Fから作用する床反力を検出する6軸力センサ56とを少なくとも備えると共に、足部22に床面と接地するときの衝撃を緩衝する緩衝部材224を備えてなる脚式移動ロボットにおいて、足部22の緩衝部材224に導電部材226を設ける。
(もっと読む)
脚式移動ロボット
【課題】 足部に設けられる床反力検出器の小型化・軽量化が可能な脚式移動ロボットを提供する。
【解決手段】 6軸力センサの中心Pbは、ロボットの起立静止状態において平面視で板バネ部S1〜S4の底面側に設けられた接地領域のうちの最遠点までの距離が最小となる位置Pa上に設けられており、平面視で6軸力センサの中心Pbから各板バネ部S1,S2,S3,S4の底面の接地領域それぞれの最遠点までの距離L1,L2,L3,L4が等しくなっている。そして足首関節の中心Pcは、平面視で位置Paに対して後方にオフセットしている。
(もっと読む)
脚式移動ロボット
【課題】 簡素な構造でありながら、着地時の衝撃を吸収でき、軽量化された足部を備えた脚式移動ロボットを提供する。
【解決手段】 脚式移動ロボットの足部17は、板バネ部S1,S2,S3,S4を備えている。板バネ部S1,S2,S3,S4は、それぞれ板バネであるバネ部62b1,62b2,62b3,62b4と、減衰機能を有する第一の中間部材と、滑り止めの機能を有する第一の足底部材64と、を備えており、床面に接地した際に、撓みつつロボットの自重を支持する。
(もっと読む)
警備ロボット
【課題】車などの移動体に搭乗可能なロボットであって、ロボット自ら異常の度合を判定し、それに応じて動作するようにした警備ロボットを提供する。
【解決手段】加速度センサ(内界センサ)およびCCDカメラ、マイクロフォンなどの外界センサを備え、それらの出力から得られる情報に基づいて車Vに生じつつある異常の度合をSMALL,MEDIUM,LARGEと判定し(S10から16)、判定された異常の度合に応じて注意、警告、制止のいずれかからなる防止動作を行う(S18から28)。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
会話処理装置および方法、並びに記録媒体
【課題】 ユーザに楽しく自然な会話を提供する。
【解決手段】 ロボット1のプロファイルメモリ121には、ユーザの趣向に関するデータ(プロファイルデータ)が記憶されている。サーバ101の話題データベース110には、話題となる情報が記憶されており、その情報は、ロボット1に対してインターネットなどを介して提供される。ロボット1は、提供された情報のうち、プロファイルメモリ121に記憶されているプロファイルデータをフィルタとし、フィルタ112Bによりフィルタリングした結果、残った情報のみが、話題メモリ76に記憶される。話題メモリ76に記憶されている情報は、ユーザと会話している時に用いられる。
(もっと読む)
21 - 40 / 40
[ Back to top ]