
Fターム[2C150EF29]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 音又は声 (102)
Fターム[2C150EF29]の下位に属するFターム
特定の音又は声に反応 (21)
Fターム[2C150EF29]に分類される特許
1 - 20 / 81
ロボット装置、ロボット制御方法、ロボット制御プログラム、およびロボットシステム
【課題】ユーザーへの情報の表現力を向上させるとともに、ユーザーの関与によって表現内容を変化させるロボットシステムを提供する。
【解決手段】ロボットと映像表示端末の組み合わせにより、現実のサービスを寸劇表現することで、ユーザーによる機能発見と感情移入を容易にしてユーザーへの情報の表現力を向上させるとともに、得られるユーザー属性と環境属性を反映し表現内容を変化させることでユーザーが飽きさせないようにする。
(もっと読む)
知育用メカトロ融合型木製積木

【課題】感性的側面における優れた素材による積木を提供する。
【解決手段】蝦夷松等の木材によって立方体、直方体、円柱、四角錐、三角錐等の多面体であったり球等の所定の立体形状に構成された木製積木1であって、外部要因を検知する光センサ、傾きセンサ、磁気センサ、音センサ、接触センサ、カラーセンサ又は温度センサ等の検知装置と、検知装置で検知した信号を処理する制御装置と、制御装置からの出力に応じて作動する発光体、振動体、発音体等の作動装置と、電源部とを内部に有する。
(もっと読む)
コミュニケーションロボット
【課題】使用者がロボットに向けて発話するとき、使用者がより話し易く、より親しみを感じることができるコミュニケーションロボットを提供する。
【解決手段】使用者が発する話し言葉を検知する音声検知手段と、所定の応答反応を表出する反応表出手段とを有したコミュニケーションロボットに、使用者の話し言葉に反応して予め定められた複数パターンの応答反応を表出させる。このとき、話し言葉が通常表現であるか否かの判定、話し言葉が同意要求表現であるか否かの判定、話し言葉が断定表現であるか否かの判定の少なくともいずれかの判定を実施し、判定結果に基づいて異なる応答反応を表出させる。
(もっと読む)
動作体玩具
【課題】 興趣性の高い動作体玩具を低コストで実現する。
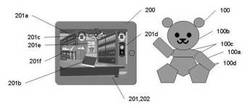
【解決手段】 動物または人の形を模した形状を有する動作体玩具100であって、音声出力部を有し、かつ、肢部131〜133が動作可能に取り付けられた胴体部120と、胴体部120に対して、動作可能に取り付けられた首部によって支持されており、移動体通信機器150が嵌合されることで、移動体通信機器150を動作体玩具100の顔面位置において保持する頭部110と、頭部110において保持された移動体通信機器150に対するユーザ入力に応じて出力される信号を、胴体部120が有する音声出力部及び胴体部120に取り付けられた肢部131〜133を動作させる制御部に伝送するための伝送部材114とを備えることを特徴とする。
(もっと読む)
動作体玩具
【課題】 興趣性の高い動作体玩具を低コストで実現する。
【解決手段】 動物または人の形を模した形状を有する動作体玩具100であって、音声出力部を有し、かつ、肢部131〜133が動作可能に取り付けられた胴体部120と、胴体部120に対して、動作可能に取り付けられた首部によって支持されており、移動体通信機器150が嵌合されることで、移動体通信機器150を動作体玩具100の顔面位置において保持する頭部110と、頭部110において保持された移動体通信機器150に対するユーザ入力に応じて出力される信号を、胴体部120が有する音声出力部及び胴体部120に取り付けられた肢部131〜133を動作させる制御部に伝送するための伝送部材114とを備えることを特徴とする。
(もっと読む)
玩具
【課題】玩具を提供すること。
【解決手段】無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。
(もっと読む)
ロボット端末及びロボットシステム
【課題】ロボットが実行できる処理を工夫して、他のロボット端末との間でコミュニケーションを図ることを実現すること。
【解決手段】ロボット端末300に、ロボット端末400との同期をとる同期手段と、人間からのアクションの有無を判定する判定手段と、ロボット端末400と協働して使用者に披露すべきアクションを実行するためのアクションデータが格納されるメモリと、メモリに格納されているアクションデータに基づくアクションを実行する実行手段と、所定時間を計時する時計とを備え、同期手段によってロボット端末400との同期がとられた後であって、時計によって所定時間の計時中に、判定手段によって人間からのアクションがないと判定された場合に、実行手段によってメモリに格納されているアクションデータに基づくアクションを他のロボット端末と協働して実行させる。
(もっと読む)
可動眼球玩具および人形玩具
【課題】 電力によって開閉部位が動作する可動眼球玩具を組み込むことで飾った状態でも目が稼働する人形玩具を提供する。
【解決手段】 本発明の人形玩具は、可動眼球玩具10を備えており、この可動眼球玩具10は、開閉部位を有し、電力によって開閉部位を開閉させる動作装置23を有した二個の眼球と、電力供給装置29と、二個の眼球の動作装置23を同時に動作させる動作同期手段と、二個の眼球を所定の位置に固定する眼球固定手段と、を備え、動作同期手段はプログラムに従って各種処理を実行する演算装置31、および、少なくとも二個の眼球の動作装置23を同時に動作させる同期プログラムが記憶された記憶装置32からなる制御装置21によって構成され、さらに、外部環境の変化を検出した場合に制御装置21に環境変化検知信号を送出する環境変化検出装置25を有している。
(もっと読む)
ユーザー間コミュニケーション促進用ロボット
【目的】擬似ペット同士が互いに自発的に交信・交流を行うことができる擬似ペットもしくは縫ぐるみ等のキャラクタ形態物を提供する。
【構成】ユーザーが連れて歩く擬似ペット(コンピュータを含み、電気的に作動する装置で、肉体に相当する部分を有するもの)であって、近傍のエリアにある他の擬似ペットに受信されるように、「擬似ペットによる所定の挨拶信号」を、無線で送信するための挨拶信号送信手段と、近傍のエリアにある他の擬似ペットから無線で送信された「擬似ペットによる所定の挨拶信号」を受信するための挨拶信号受信手段と、を含むことを特徴とする擬似ペットもしくは縫ぐるみ等のキャラクタ形態物である。
(もっと読む)
会話ロボット
【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
遠隔操作ロボット
【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
発光風鈴
【課題】
従来からの音色鑑賞に加え釣鐘外において風力と連動した発光を伴う可視的観賞の両方が可能な風鈴を提供する。
【解決手段】
釣鐘から吊り下げられている紐や短冊に発光機能を持たせることにより、風力に連動した光の3次元的な揺らぎと音色とが混ざり合った従来にはない独特の鑑賞手段を有する発光風鈴が提供できる
(もっと読む)
鉄道模型
【課題】空間の利用効率および鉄道車両の再現性を向上しつつ、さらに車両に動きを加えることで興趣を高める。
【解決手段】鉄道模型100は、壁面160に固定するための背板110と、背板に固設され、鉄道車両を模した鉄道車両模型の一部であり少なくとも鉄道車両の先頭部を含む部分筐体112と、外部から制御情報を取得する情報取得部114と、部分筐体に設けられた変動体116と、取得された制御情報に応じて、変動体を異なる態様に変動させる変動制御部122とを備える。
(もっと読む)
交流型玩具
制御情報生成装置および形状制御装置
【課題】音節の発音内容を規定した発音情報に基づいて、口を模した部分を持つ装置における口の形状を変化させる制御を行いながらも、口の形状の変化を自然なものにすること。
【解決手段】本発明の実施形態に係る形状制御システムにおいては、発音装置および口を模した部分を有する形状変化装置を、形状制御装置を用いて制御する。形状制御装置は、発音情報に基づいて発音装置を制御するとともに、発音情報から制御情報を生成して、この制御情報を用いて形状変化装置を制御する。形状制御装置は、発音情報から制御情報を生成するときに、口の形状が変わるときにおける変化前から変化後までの遷移時間を示す遷移情報を、予め決められたアルゴリズムに従って決定する。そして、形状制御装置は、口の形状が変化させるときには、遷移時間で徐々にその形状が変化するように形状変化装置を制御する。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
コマンド認識装置、コマンド認識方法、及びコマンド認識ロボット
【課題】ユーザが意図した場合に発話によりロボットの動作を制御するためのコマンドを認識する、コマンド認識装置、コマンド認識方法及びコマンド認識ロボットを提供する。
【解決手段】発話情報から単語列情報を決定又は選択する発話理解部21と、前記発話情報と前記文に基づいて音声確信度を算出する音声確信度算出部221と、画像情報と前記文に含まれる語句情報に基づいて語句確信度を算出する語句確信度算出部22と、音声確信度及び語句確信度に基づいて、前記単語列情報のコマンドを実行するか否かを判断する動作制御指示部225とを備える。
(もっと読む)
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具
動かすことおよび取り外すことができる本体部品を有するインタラクティブな話す玩具は、ユーザから入力された音声に応えて、話し、歌い、動き、踊る能力を有する。予めプログラムされたパラメータと、各種センサからのリアルタイム入力との組合せに基づいて玩具の動きおよびそれに伴う音を制御およびカスタマイズするために、各種モータ、アクチュエータ、マイクロフォン、スピーカ、および集積回路手段が用いられる。玩具は、高度なインタラクティブ性、ならびにユーモア、自発性、および予測不可能性をユーザに提供する。 (もっと読む)
音源定位ロボット
指向性の高いトカゲの耳をモデリングする生態模倣ロボットを提供する。指向性は極めてロバストであり、神経処理は非常に簡単である。したがって移動式の本音源定位ロボットは容易に小型化することができる。本発明は2つの小型マイクロフォンからの音の入力を用いて、トカゲの耳の聴覚を模倣する単一な電気回路に基づく。回路はロバストな指向性をおよそ2−4kHzで生じる。回路の出力はモデル神経システムに供給される。神経系モデルは両側性であり、帯域通過フィルタのセットを含んで、両耳からの入力を比較するシミュレーションされたEIニューロンを有する。本モデルはデジタル信号プロセッサ上のソフトウェアで実装され、ロボットの左右のステアリングモーターを制御する。さらに、神経系モデルは、装置を自動校正するために自己適応できる神経ネットワークを含む。 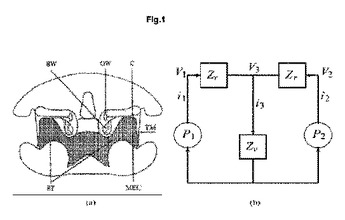 (もっと読む)
(もっと読む)
1 - 20 / 81
[ Back to top ]