
Fターム[2D050FF03]の内容
杭、矢板の設置・撤去及びそれらの付属品 (4,237) | 制御装置(方法) (204) | 電気・電子手段(方法) (114)
Fターム[2D050FF03]の下位に属するFターム
Fターム[2D050FF03]に分類される特許
1 - 20 / 20
杭又は壁体の打設装置及び打設方法並びにバイブロハンマ
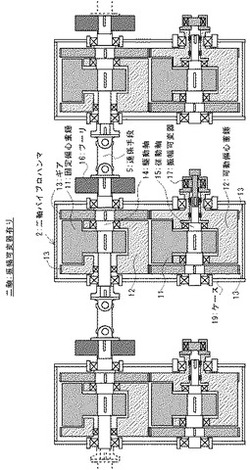
【課題】複数のバイブロハンマを連係させた大型の杭又は壁体用の打設装置を提供する。
【解決手段】ベース部材と、杭又は壁体を把持する把持装置と、複数の多軸バイブロハンマ2と、を備えた杭又は壁体の打設装置において、多軸バイブロハンマ2は、回転駆動手段による回転力を一端に伝達される駆動軸14と、従動軸15と、駆動軸14及び従動軸15の各々に装着された一対の固定偏心重錘11及び可動偏心重錘12と、駆動軸14の一端に伝達された回転力を伝達するための複数のギア13と、固定偏心重錘11に対する可動偏心重錘12の位相差を変更又は保持するために従動軸15の一端に装着された振幅可変器17と、隣り合う多軸バイブロハンマ2の間に設けられかつ双方の多軸バイブロハンマ2における駆動軸14同士を連係させる連係手段5と、を有する。
(もっと読む)
杭打設システム

【課題】障害物の影響を抑え、測量時の正確性を高める。
【解決手段】この杭打設システムは、鋼管杭の位置を測量するためのトータルステーションと、トータルステーションのターゲットとなる光学プリズムとを備えている。光学プリズムは、鋼管杭の上端部に設置されている。
(もっと読む)
油圧圧入機支持力測定装置
【課題】本発明は、鋼管矢板等の杭を圧入しながら地盤の支持力を測定できると共に前記支持力をリアルタイムで記録、管理できる油圧圧入機支持力測定装置を提供する。
【解決手段】油圧圧入機10の第1ジャッキ用油圧ホース30の中間部には油圧圧入機支持力測定装置34の圧力変換器取付体36が配設されている。この圧力変換器取付体36には第1ジャッキ用油圧ホース30を流れて油圧ジャッキ装置18に流入するオイルが流れるようになっている。圧力変換器取付体36には圧力変換器38が設けられ、圧力変換器38は圧力変換器取付体36を通過するオイルの圧力を電流に変換する機能を有している。圧力変換器38はひずみ測定器42と接続されている。ひずみ測定器42はプリンター46と接続されており、鋼管矢板1を圧入している時の圧力の値等をプリントすることができるようになっている。
(もっと読む)
地盤の振動を減衰させる方法、および同装置
【課題】 例えば杭打ち作業のように、振動公害を発生する虞れの有る地盤振動を減衰させる技術を提供する。
【解決手段】 震源の周囲の地表を覆って圧電制振板5A,5Bを配置し、その上に加圧重錘6を載置する。前記圧電制振板は、上側鋼板と下側鋼板との間に圧電素子を挟んで構成されている。地盤振動は前記圧電素子に対して繰返し圧力を与えて発電させる。このようにして地盤の振動エネルギーが電気エネルギーに変換され、地盤振動が減衰する。発生した電気エネルギーを電気抵抗に流し、熱エネルギーに再変換して放散させても良いが、バッテリに充電して有効利用することもでき、また、発生電圧を検出して振動の強さを計測することもできる。
(もっと読む)
鋼矢板の打設管理装置及びその打設管理方法
【課題】 鋼矢板の効率的な打設管理、及び継手部の健全性の確認ができる鋼矢板の打設管理装置及び鋼矢板の打設管理方法を提供することである。
【解決手段】 鋼矢板の打設管理装置16は、地盤中に打設される鋼矢板1に設置した測距用ターゲット17を、打設位置から離れた座標既知点より視準して測距データを得るトータルステーション18と、鋼矢板の継手部2に沿って配線された被覆電線10と鋼矢板1との間の絶縁抵抗を測定する絶縁抵抗計15と、鋼矢板の継手部の温度を測定する温度測定器19と、打設手段26を駆動させる駆動電流を測定する電流変成器20と、前記測距データに基づく三次元座標によって鋼矢板頭部の平面位置、打設高さ、打設速度を算出する演算処理装置21とから構成され、前記測距データを無線信号に変換して送出する送信機23と、該送信機23からの無線信号を受信して演算処理装置21に送出する受信機24とを備えたことである。
(もっと読む)
矢板の打設支援システム
【課題】既設矢板の隣に順次、新たな矢板を互いの継手部どうしを嵌合させて打設する際に、隣り合う既設矢板に干渉して所定位置に打設できなくなることを防止して、高精度で所定位置に打設できる矢板の打設支援システムを提供する。
【解決手段】新たな鋼矢板12cの上端部に取り付けた1つの反射体4からの反射光を検知した自動追尾光波測距測角器1の検知データに基づいて、演算装置により算出した鋼矢板12cの基準点の2次元平面座標と、鋼矢板12cに隣り合う既設鋼矢板12bの基準点の演算装置に記憶されている2次元平面座標との比較に基づいて、鋼矢板12cの2次元平面での目標打設位置の指標データを算出し、この指標データをバイブロハンマ8を吊設したクレーン6のオペレータ室7に配置したモニターにリアルタイムで表示する。
(もっと読む)
杭打機
【課題】杭打機本体の前部が浮き上がった状態でフリー降下機構を作動させたときでも、油圧モータが過回転状態になったり、負圧が発生したりすることを防止し、油圧モータを保護することができる杭打機を提供する。
【解決手段】リーダに上下動可能に設けたオーガ駆動装置を昇降させるためのオーガ昇降用油圧モータ18を駆動する昇降用油圧回路20aと、オーガ昇降用油圧モータを自由回転させてオーガ駆動装置をフリー降下させるためのフリー降下用油圧回路20bとを備えた杭打機において、前記フリー降下用油圧回路を作動させた状態で、前記オーガ駆動装置が上昇したときに前記オーガ昇降用油圧モータから作動油が流出するフリー降下回路49に、オーガ昇降用油圧モータからの作動油の流出を規制するためのチェック弁29を設ける。
(もっと読む)
基礎構造の構築方法
【課題】信頼性の高い基礎構造を効率的に構築することが可能な基礎構造の構築方法を提供する。
【解決手段】建物1の荷重を載荷させる直接基礎部2と鋼管杭3からなる杭基礎部30とを備えた構造物の基礎構造の構築方法である。
そして、直接基礎部の反力と鋼管杭の各杭位置が負担する杭反力とを算出する杭反力算出工程と、最低杭長L1を算定し、推定支持力P1の推定誤差の吸収が可能となる最長杭長L2を確保できる鋼管杭3を選択する杭選択工程と、鋼管杭を最低杭長まで貫入した後に支持力の確認をおこない、杭反力以上の支持力が確認できるまで貫入を続け、全長を打設する前に杭反力以上の支持力が確認された場合に鋼管杭の余剰分31がある場合はそれを撤去する杭打設工程と、を備えている。
(もっと読む)
杭打用アタッチメントのトルク計測器用校正装置
【課題】現場において反力受けを構築する必要なく、また、トルク計測装置を分離して工場等に搬入する必要がなく、現場において簡単に校正作業が行なえる杭打用アタッチメント用のトルク計測装置を提供する。
【解決手段】計測器バー36を杭打用アタッチメント19の駆動軸41にチャック装置22により着脱可能に結合する。反力ブラケット37を地面に載置し、反力受け荷重としてウエイト48および/または杭打用アタッチメントを装着する掘削機以外の作業機を載せる。計測器バー36と反力ブラケット37との間に校正用ロードセル38を設ける。計測器バー36を杭打用アタッチメント19の駆動モータ20により回動させ、校正用ロードセル38により計測される出力信号からトルクを表示装置39により演算し出力する。
(もっと読む)
施工管理装置
【課題】掘削機の掘削ロッド先端の拡大ヘッドを拡翼させて拡大根固め部を築造する拡大根固め工法において、拡大ヘッド拡翼と拡大根固め部築造を客観的・定量的に正確に確認でき、また在来の掘削機の管理装置により低コストで確認できるようにする。
【解決手段】駆動装置の掘削ロッドを回転させる電動機の電流値または積分電流値を計測し、拡翼前の掘削時の電流値・積分電流値と拡翼後の拡大掘削時の電流値・積分電流値を比較し、拡大掘削時の電流値・積分電流値の増加比率が設定値Sよりも大きくなった時に拡大ヘッドが拡翼したと判断する。拡大上下反復工程の電流値・積分電流値が低下して拡翼前の掘削時の電流値・積分電流値に近づき安定した時に拡大工程が完了したと判断する。
(もっと読む)
杭打機
【課題】油圧モータを備えた回転駆動装置の回転出力について、その回転トルクや回転数の可変範囲が広く取れるようにした油圧供給装置を備えた杭打機を提供すること。
【解決手段】油圧モータ121を駆動させて回転を出力する回転駆動装置120に対し、油圧ポンプ1とコントロールバルブ3と、正転側及び逆転側流路25,26と、メインリリーフバルブ5とを有する油圧供給装置を備えたものであって、その油圧供給装置は、正転側流路25に逆転側流路26内の油圧によって開弁するパイロットチェックバルブ5が設けられ、そのパイロットチェックバルブ5を跨ぐように接続された増圧流路27には、メインリリーフバルブ4の設定値で開弁するようにした開閉弁6と、一次側の作動油を減圧して二次側へ送る電磁比例減圧弁8と、作動油の圧力を増圧して二次側に吐出する油圧ブースタ9と、逆流を防止するチェックバルブ10とが設けられた杭打機。
(もっと読む)
低空頭杭打機
【課題】上部に障害物のある現場においてもより能率良く杭打ち作業が行なえる低空頭杭打機を提供する。
【解決手段】走行体1に旋回装置3を介して旋回体2を設置し、旋回体2にパワーユニット5および運転室4を設置する。運転室4を下部4aと上部に分割する。旋回体2にリーダ10を取付け、リーダ10に沿って昇降可能に杭打用回転駆動装置24を装着する。リーダ10の高さを運転室4の上部を除いた高さとほぼ等しくする。
(もっと読む)
懸垂式杭打機
【課題】リーダにかかるモーメントを軽減させるようにした懸垂式杭打機を提供すること。
【解決手段】ベースマシン2,3のブーム4に対し、そのブーム先端より高い位置に上部6aを突き出してリーダ6が連結支持され、ベースマシンのウインチ31から送り出されたワイヤロープ15の巻き出し及び巻き戻しによって、リーダ6に装着された作業装置80を昇降させるものであって、リーダ6のトップシーブ8には前後に複数のフロントシーブ26とリヤシーブ25とが備えられ、リーダ6又はブーム4には、そのリーダ6がブーム4の先端部にピン結合された連結部pに近接して複数のバランスシーブ22が備えられ、トップシーブ8を介してリーダ6の後方から前方の作業装置80まで掛け渡されたワイヤローブ15が、リーダ後方にてバランスシーブ22とリヤシーブ25との間で複数回掛け渡しできるようにした懸垂式杭打機1。
(もっと読む)
杭打機
【課題】 リーダの機体左右方向の無理な傾き操作を防止した杭打機を提供すること。
【解決手段】 ベースマシン2,3に対して機体前後方向に揺動自在に軸支されたリーダ7を、機体後方からステーシリンダ9を備えた伸縮可能な2本のバックステー8によって起立させ、ステーシリンダ9の伸縮作動によってリーダ7を機体前後方向と機体左右方向にも傾き調節が可能なものであって、ステーシリンダ9のストロークを計測するストロークセンサ31と、リーダ7の機体左右方向の傾きに対応した警報値を設定し、ストロークセンサから得られる計測値に基づいて算出した値が当該警報値を超えた場合に警報を発し、又は警報手段を動作させる警報装置32とを有する杭打機1。
(もっと読む)
既設杭撤去装置
【課題】 油圧スイベルジョイントを省略して安全かつ長寿命の既設杭撤去装置を提供する。
【解決手段】 リーダに沿って昇降するオーガマシン1と、オーガマシン1によって回転される回転部2と、回転部2と一体に回転するように回転部2に設けられて既設杭の切断又は引抜きのために使用されるアクチュエータと、回転部2と一体に回転するように回転部2に設けられてアクチュエータの作動の制御を行う作動制御手段4と、を備える。また、作動制御手段4は、作動油タンクと、作動油タンクから作動油をアクチュエータへ供給する油圧ポンプ6と、油圧ポンプ6を駆動させるモータ7と、アクチュエータの作動状態を切り換える電磁弁8と、電磁弁8及びモータ7の制御を行う制御部9と、を有する。
(もっと読む)
チュービング装置
【課題】 工法に応じて昇降シリンダのスピードを変化させるチュービング装置を提供すること。
【解決手段】 チャック機構によって把持したケーシング等を、複数本の昇降シリンダを伸縮させることによって上下させるとともに、回転を与えて地盤への押込みや引抜きを行うものであって、昇降シリンダ19は、そのロッド室191とヘッド室192に対して作動油が供給或いは排出されることよって伸縮する油圧シリンダであって、各昇降シリンダ19のロッド室はロッド側ライン31に、各昇降シリンダのヘッド室はヘッド側ライン32にそれぞれ接続され、その複数の昇降シリンダのうち少なくとも1本を残した他の昇降シリンダ19b,19cは、ロッド側ラインに接続されたロッド室が切換手段35によって当該昇降シリンダのヘッド室との接続に切り換えられるようにしたチュービング装置10。
(もっと読む)
杭用チャックの制御方法、および同装置
【課題】 振動式杭打抜機用の起振機に装着されているチャックを回転させる機構を改良して、該チャックを支持しているベアリングが小容量のものでも充分な耐久性を発揮することができ、かつ、該チャックに把持されている杭のz軸周り回転角位置を、地球基準で容易に制御できるようにする。
【解決手段】 チャック4の回転軸4bにブレーキ胴6aを固着するとともに、該回転軸に対してスプライン8を介してドリブン歯車7を取り付け、駆動モータMによって回転駆動する。前記のブレーキ胴6aを、固定シュー6b及び可動シュー6cで制動することにより、起振機に対してチャックを強固に固定する。前記駆動モータMの正,逆転・停止は、ジャイロ機構Jによる回動角位置検出信号αに基づき、自動制御回路CPUによって行なわれる。
(もっと読む)
杭穴の掘削方法及び基礎杭構造
【課題】掘削効率が高め、より安定した強度の根固め部を確実に築造する。
【解決手段】地面14から掘削ヘッド5で杭穴15の軸部17を掘削する(a)。この間、常にオーガーの積算電流値等の地盤掘削データを記録する。 設計時の拡径開始位置19aで掘削ロッド1の回転を止め(b)、逆回転して拡径掘削を始める。設計値と積算電流値とを比較分析し、支持地盤に至るまで拡径掘削を続ける。所定の強度地盤の出現が確認できたならば、その位置を支持地盤19bとする(c)。杭穴底16付近で掘削ヘッド5から根固め液を吐出し均一に撹拌・混合する(d)。掘削ヘッド5を杭穴底16に当てて回転して、所定の地盤強度を再度確認する(e)。掘削ヘッド5を引き上げながら、杭穴軸部17で杭周固定液を吐出する(f)。既製杭10を杭穴15内に沈設し、根固め部18内に、環状突起11を位置させ保持して、基礎杭構造21を構成する(g)。
(もっと読む)
杭打機用深度測定装置
【課題】クレーンのブームの先端にオーガマシーンを支持固定した型式の杭打機へ簡単に装着することができ、貫入体の貫入深さ等を正確に測定できる安価な杭打機用深度測定装置を提供する。
【解決手段】ラフタークレーン又はトラッククレーンのブームの先端に軸支したオーガマシーンにより貫入体を回転させつつ土中へ貫入させる型式の杭打機に装備され、前記オーガマシーン前方の支持金具に固定する電動ウインチと、架台上にワイヤ巻取りリールとロータリエンコーダを配備して、先端部を前記電動ウインチの吊上げフックに固定して基端部を前記ロータリエンコーダの回転プーリによりワイヤを一定の張力状態で巻き取り可能にした計測用ワイヤとから成る深度計と、ロータリエンコーダから発信した計測用ワイヤの移動量に対応する距離情報信号が入力されて当該距離情報信号から貫入体の地中への貫入深さを演算表示するコンピュータを備えた制御部とから構成する。
(もっと読む)
杭打機
【課題】 リーダをベースマシン上部に略水平に倒伏した輸送時に、オーガ駆動装置を移動させる誤操作をしたことをオペレータに知らせる。
【解決手段】 ベースマシン2に起伏可能に設けたリーダ3の起伏状態を判別するリーダ起伏リミットスイッチLSdと、オーガ駆動装置7の移動操作を検出する下降パイロット圧検出プレッシャースイッチ26及び上昇パイロット圧検出プレッシャースイッチ27と、リーダ5の倒伏時にオーガ駆動装置7の移動操作を行うと警報を発するブザーBとを有し、該ブザーBの作動時に、オーガ移動用油圧回路29を遮断してオーガ駆動装置7の移動を停止させる遮断弁30を作動させる電気回路40を油圧回路12に付設した。
(もっと読む)
1 - 20 / 20
[ Back to top ]