
Fターム[2D054GA02]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 制御目的 (383) | 直進性 (30)
Fターム[2D054GA02]に分類される特許
1 - 20 / 30
孔軌跡の計測装置及び計測方法
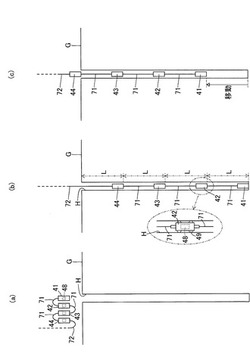
【課題】管体のズレ等を原因とする計測誤差が生じるおそれがなく、しかも計測時間が長くなるとの問題も生じない孔軌跡の計測装置とする。
【解決手段】ロール角、ピッチ角及びヨー角を検出する角度検出装置41…と操作材72とを有し、角度検出装置41…が孔H内に挿入され、この挿入状態において操作材72を引くと角度検出装置41…が孔入口側へ移動して孔Hの軌跡を計測する構成とされた孔軌跡の計測装置であって、角度検出装置41…が直列的に複数備えられ、操作材72が最も孔入口側に位置する角度検出装置44に取り付けられ、角度検出装置41…同士が所定長L離間するように連結材71によって連結され、操作材72を引くと角度検出装置41…が孔入口側へ移動して、それぞれの角度検出装置41…が隣接する角度検出装置42…までの孔軌跡を計測する構成とされる。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機

【課題】既設トンネルと地山掘削機との位置関係にかかわらず、かつ、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネル内に設定された基準線に対する地山掘削機の中心軸のずれ量を測定して、地山掘削機の位置を検出可能な位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
方向制御削孔方法及び装置
【課題】計測誤差・削孔誤差が生じる可能性が小さく、しかも方向を制御しながら削孔するに好適な方向制御削孔方法とする。
【解決手段】削孔管5を有し、削孔管先端部50Fに角速度検出手段AD及び傾斜角検出手段BDを設けてなる削孔装置を用いて、削孔管5を推進させつつ、角速度検出手段ADにより角速度を検出し、積分することにより方位角変化量を求め、他方で、傾斜角検出手段BDにより削孔区間の先端における傾斜角を検出し、方位角変化量と傾斜角とを用いて、削孔区間の基端に対する先端の相対位置を求め、この作業を所定回繰り返して削孔管5を地中に段階的に進行させた段階で、削孔管5内に挿入式計測装置40を挿入し、削孔管先端部50Fまで移動させて孔先端部の現在位置を計測し、この計測値に基づいて相対位置を合算して得た孔先端部の現在位置を補正し、この補正値を基準として更に削孔管5を地中に段階的に進行させる。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 所定位相の電磁波を発振する発振手段と、符号発生手段からの符号信号と上記電磁波とを合成し、合成電磁波を生ずる合成手段と、上記シールド掘進機に設けられ、上記合成電磁波に対応した磁場を形成して送出する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場を検出して上記合成電磁波を受信する受信手段と、受信された合成電磁波を上記符号信号と同期した符号信号を用いて波形反転演算を行ない、上記所定位相の電磁波と同位相の電磁波を取り出す演算手段と、上記演算手段によって取り出された電磁波の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機の後方に埋設管を結合した推進体を立抗から掘削しながら推進させ、上記埋設管によって形成される管路を敷設する推進シールド工法において、上記シールド掘進機に電磁波を送信する送信コイルを装着し、上記シールド掘進機の到達予定位置に上記電磁波の受信コイルを設けると共に、上記受信コイルを上記立抗に向かって延在する軸に対して回転し得るように形成し、上記受信コイルの受信強度にもとづいて上記シールド掘進機を上記受信コイル位置に誘導するようにした構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機に設けられ、所定位相の磁場を形成する電磁波を送信する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場と、上記磁場に起因する誘導電流によって形成された位相の異なる磁場との合成磁場に対応した電磁波を受信する受信手段と、受信された電磁波をフーリェ変換することにより上記磁場に対応する成分と上記位相の異なる磁場に対応する成分とに分離する分離手段と、分離された上記所定位相の磁場に対応する成分の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
小口径管泥水式曲線推進装置及び小口径管泥水式曲線推進工法
【課題】小口径管であっても、長距離の泥水式曲線推進を可能とする。
【解決手段】
小口径管泥水式曲線推進装置1は、ケーシング2と、ケーシング2の軸方向に固定された送泥管3及び排泥管4と、ケーシング2の端部に固定され、送泥管3及び排泥管4をそれぞれ取り付ける取付孔50,51を備えた接続ブロック5と、ケーシング2の軸方向に固定されたレール6と、ケーシング2に設けられ、小口径管7とケーシング2の間隔を保持する保持部材80と、を有する接続体8を備え、推進の前後方向を撮像するカメラ9と、カメラ9の近傍に設けたターゲット10と、カメラ9とターゲット10とを一体に固定するカメラキャリア11と、を備えている。
(もっと読む)
オープンシールド機およびこのオープンシールド機を使用するオープンシールド工法
【課題】 例えば軟弱地盤において同一土質性状であっても掘削断面内の地盤に部分的で僅かな硬軟の違いがある場合などに、シールド機の直進性を向上でき、また、裏込注入材と地山との間の周面摩擦力を増加させてコンクリート函体の沈下低減を図れるオープンシールド機およびこのオープンシールド機を使用するオープンシールド工法を得る。
【解決手段】 刃口を有するフロント部1dと、シールドジャッキ2を有するジャッキ部1eと、コンクリート函体4を吊降ろすテール部1cとで構成されるオープンシールド機1において、前記テール部1cの下部両隅部に、テール部長さ方向にのびる突起部16を鉛直方向に向けて突設した。
(もっと読む)
シールド機およびシールド機の制御方法
【課題】 単一のカッタによって、前方の地山を任意の形状に掘削可能であり、シールド機の姿勢や進行方向などの制御を容易に行うことができるシールド機およびシールド機の制御方法を提供する。
【解決手段】 隔壁5には、回転体21が設けられる。回転体21の前面には、フレーム25が設けられる。回転体21にはフレーム25を回転させるためのフレームモータ27が設けられる。フレーム25の一方の端部は、フレーム回転軸35を中心に回転可能なように回転体21に接合され、フレーム25は、回転体21に対して異なる回転軸で回転動作が可能である。フレーム25の回転体21との接合部とは反対側の端部近傍に、複数の刃を有するカッタ29が設けられる。フレーム25にはカッタモータ31が設けられ、カッタ29は、カッタ回転軸37を中心に回転可能である。なお、カッタ回転軸37はフレーム回転軸37および回転体回転軸33に対し偏心している。
(もっと読む)
地中掘進装置
【課題】地中を掘進する掘進ヘッドの角度を検出し、その信号を確実にキャッチする。
【解決手段】掘進ヘッドの後方に接続した管状の連結ロッドを前進および回転させて地中を掘進する地中掘進装置において、掘進ヘッド2に角度センサ1を接続し、掘進ヘッド2の鉛直方向に対する角度が所定値であることを検知して発光する発光ダイオード16を備えるようにする。地中の掘進なので後方の孔が屈曲していたり水が入っていたりしても光は確実に検出できるから、掘削が地中の奥深くにまで進行した状態であっても掘進ヘッド2の角度を確実に知ることができ、その結果、その角度を基準として掘進ヘッド2の角度を調整することにより、施工精度が向上する。
(もっと読む)
シールドジャッキの圧力制御装置
【課題】同時掘進中に油圧ラインを切り換える必要がなく、マシンの挙動を乱すことなく方向制御し得るシールドジャッキの圧力制御装置を提供する。
【解決手段】圧油供給ライン15と、圧油供給ライン15をシールドジャッキ11に接続する第一制御圧力側ライン24と、第一制御圧力側ライン24に設けられ、第一制御圧力側ライン24内の油圧を可変に減圧する第一減圧弁26と、第一減圧弁26より下流の第一制御圧力側ライン24に設けられた第一開閉弁27と、圧油供給ライン15をシールドジャッキ11に接続する第二制御圧力側ライン25と、第二制御圧力側ライン25に設けられ、第二制御圧力側ライン25内の油圧を可変に減圧する第二減圧弁29と、第二減圧弁29より下流の第二制御圧力側ライン25に設けられた第二開閉弁30とを備える。
(もっと読む)
礫用管埋設装置
【課題】オーガヘッドの背面への礫の噛み込みを防止して掘削効率を高めることができる礫用管埋設装置を提供する。
【解決手段】オーガヘッド21が後退したときにオーガヘッド21の背面に当接する回転支持部材14は、その先端がオーガヘッドの背面の外周縁部にのみ当接するように構成され、その環状の当接部14aの半径方向寸法を数ミリメートル程度に設定できる。これにより、オーガヘッド21の背面と回転支持部材14の当接部14aとの間に噛み込まれ得る土砂や礫の量はわずかであり、大径の礫を噛み込んでオーガヘッド21が後退不能となることを確実に防止できる。
(もっと読む)
テールクリアランス自動計測システムおよびテールクリアランス自動計測方法
【課題】掘削作業を中断させることなくテールクリアランスをリアルタイムで計測する。
【解決手段】撮像手段10と、複数の基準位置と撮像手段10との離間距離と、基準高さと、基準高さに相当するピクセル数とから得られる撮像手段10固有のピクセル比Pfとを記憶する記憶手段21と、撮像手段10とセグメント4との離間距離を取得する離間距離取得手段22と、セグメント4の読取基準点Rに対応するピクセル値を読み取るピクセル値読取手段23と、読取基準点Rに対応するピクセル値と、スキンプレート3上の計測基準点3aに対応するピクセル値と、離間距離取得手段22で得られた離間距離と、ピクセル比Pfとから、テールクリアランスを算出するクリアランス演算手段24とを備えた。
(もっと読む)
シールド掘進機の推進装置
【課題】複数のシールドジャッキの伸縮ロッドを連結したシールド掘進機の推進装置において、連結された各伸縮ロッドの伸長速度、伸長長さに差が生じてもシールドジャッキにこじり力が生じない推進装置を提供する。
【解決手段】シールド掘進機の外殻を成す筒状のシールドフレーム2の内周面に、既設のセグメントに反力を取ってシールド掘進機を前進させるため、周方向に間隔を隔てて配設された複数のシールドジャッキ1と、これらシールドジャッキ1の伸縮ロッド5の端部に首振り可能に装着されたシュー6と、複数のシュー6同士を連結する連結板13とを有し、連結板13で連結される複数のシュー6が、連結板13に固定された一の固定シュー6aと、連結板13に摺動可能に当接された滑りシュー6bとを備え、滑りシュー6bと連結板13との間に、両者を所定範囲での相対移動を許容して係合する係合機構14を介設した。
(もっと読む)
管埋設方法及び管埋設システム
【課題】簡易な設備で地中に水平に管を敷設し、作業にかかる期間や費用を縮減することが可能な管埋設方法及び管埋設システムを提供すること。
【解決手段】先端に螺旋状の羽根112が設けられた鋼管110を水平に管軸を中心として回転させ、鋼管を地中に水平方向に貫入させることを特徴とする。また、鋼管の回転及び貫入は、鋼管の埋設開始位置に設けられた立て坑130に設置する回転装置140によって行われるとすることができる。また、立て坑で、鋼管の後端に別の管120を接続し、接続された管を地中に水平方向に貫入させるとすることができる。
(もっと読む)
シールド掘進機におけるテール部内の競り合い状況計測装置
【課題】テールシールとその内部を押し出される覆工との競り合い状態をリアルタイムに知ることができる、シールド掘進機におけるテール部内の競り合い状況計測方法およびその装置の提供を目的としたものである。
【解決手段】シールド掘進機テール部のテールシール取り付け部に、その円周方向に所定の間隔を隔てて複数の圧力センサー12を設置し、テール部内で組み立てられたセグメントによる覆工20に反力を取って押し出しつつ掘進する際に、各圧力センサー12からの圧力データからテール部内における圧力分布を計測する。
(もっと読む)
掘削軌跡の測定方法及び掘削工法
【課題】掘削軌跡の測定について掘削推進機の設置位置がずれても掘削軌跡の基準方位を正しく測定する。
【解決手段】掘削推進機10で地盤に建て込んだ掘削ロッド1の管内に姿勢方位を検出する慣性センサ5を送り込む。その到達点から地上側における掘削ロッド1の地盤内固定点Pまで慣性センサ5を引き戻し、その地盤内固定点Pで測定される基準方位を掘削軌跡の地上側原点として測定する。したがって掘削推進機10の設置位置が掘削過程でずれても基準方位を正しく測定可能であり掘削軌跡を正確に測定できる。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置
【課題】 推進オペレータ自らがカッタヘッド案内装置のローリング量を確認し、カッタヘッド案内装置制御手段の操作もその場で行え、作業性の優れた既設埋設管破砕用カッタヘッド案内装置を提供する。
【解決手段】 カッタヘッド案内装置100にローリング量自動計測手段90を備え、且つ発進坑内3又は推進オペレータ用操作盤85にローリング量表示と、カッタヘッド案内装置100の上下方向揺動手段60及び水平方向揺動手段70の操作機能と、を配すると共に、カッタヘッド案内装置100自体に駆動用油圧ユニット付制御手段80を搭載する。
(もっと読む)
小口径推進工法
【課題】 発進からの直線区間に続いて次に曲線区間を有する線形を有する現場を、より簡便に安価な工事費で良好な施工性をもって小口径推進を実現可能とする新しい技術手段を提供する。
【解決手段】 発進立坑からの直線区間に続いて次に曲線区間を有する線形での小口径推進工法であって、到達点から曲線開始位置までの長さ分には掘進機、ポンプ筒、強制管および誘導機が配置され、曲線開始位置から発進立坑までの直線長さ分には推進管(ヒューム管)が配置されるように、直線区間でのレーザーによる測量と直線区間並びに曲線区間での測量ロボットの走行による測量とを組み合わせて測量して掘進する。
(もっと読む)
1 - 20 / 30
[ Back to top ]