
Fターム[2D054GA19]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 制御目的 (383) | 掘削機の誘導・探知 (32)
Fターム[2D054GA19]に分類される特許
1 - 20 / 32
孔軌跡の計測装置及び計測方法
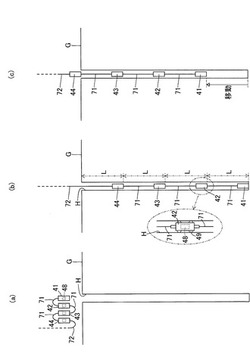
【課題】管体のズレ等を原因とする計測誤差が生じるおそれがなく、しかも計測時間が長くなるとの問題も生じない孔軌跡の計測装置とする。
【解決手段】ロール角、ピッチ角及びヨー角を検出する角度検出装置41…と操作材72とを有し、角度検出装置41…が孔H内に挿入され、この挿入状態において操作材72を引くと角度検出装置41…が孔入口側へ移動して孔Hの軌跡を計測する構成とされた孔軌跡の計測装置であって、角度検出装置41…が直列的に複数備えられ、操作材72が最も孔入口側に位置する角度検出装置44に取り付けられ、角度検出装置41…同士が所定長L離間するように連結材71によって連結され、操作材72を引くと角度検出装置41…が孔入口側へ移動して、それぞれの角度検出装置41…が隣接する角度検出装置42…までの孔軌跡を計測する構成とされる。
(もっと読む)
埋設管推進装置

【課題】埋設精度が高く長距離の掘削が可能な埋設管推進装置を提供する。
【解決手段】埋設管推進装置は、第1工程と第2工程とからなる二工程式による埋設管(8)の埋設に使用する埋設管推進装置であって、第1工程で誘導穴をあけるために使用可能な誘導管(3)と、誘導管に接続される第2工程で使用されるカッターヘッド(4)と、カッターヘッドの後部に配置されるカッター口部(6)と、カッター口部の後部に位置し、埋設管を案内可能な先導管(7)と、カッターヘッドに取付けられ、カッター口部内及び先導管内に配設されたスクリュー部(5)と、スクリュー部を回転可能にカッター口部に支持するためのヘッド支持部(21)とを備えることを特徴とする。
(もっと読む)
相対位置を地中で確認可能なシールドマシン、及び、シールドマシンの相対位置検出方法
【課題】相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高める。
【解決手段】前側スキンプレート19Fにおけるカッター14よりも後方の位置に隔壁20が設けられたシールドマシン1Bであって、隔壁20には、相手方のシールドマシンからシールドマシンの掘進方向に繰り出された小径ボーリング部を内側空間に受け入れ可能な筒状体27が設けられ、この筒状体27には、小径ボーリング部の内側空間における底面方向の位置を計測するためのセンサ板21が設けられている。
(もっと読む)
シールド掘進機における推進ジャッキの推力設定方法
【課題】同時掘進組立工法において、作動中の推進ジャッキにより必要な総推力及び曲げモーメントを得てシールド掘進機の掘進方向制御を行う。
【解決手段】セグメント組立箇所に対応する推進ジャッキ群(J9〜J12)を不作動とする一方、残りの推進ジャッキを作動させる場合には、J9〜J12の中央位置を軸線角度θ2で表し、J1〜J16を、軸線角度θ2に対応する軸線AX2の両側に二分される2つのグループA2,B2に分け、各グループについて、軸線AX2の方向に傾斜する勾配を有する第1の推力分布LA2,LB2を設定する。この推力分布の勾配率は軸線方向強さr2により決定される。この推力分布に従い、各推進ジャッキの推力分担率Qi’を算出し、偏差係数αA,αBを用いて変更して推力分担率Qiを算出する。推力分担率Qiと目標総推力とに基づいて各推進ジャッキの第1の推力目標値TQiを設定する。
(もっと読む)
小口径推進工法
【課題】掘進時に周辺地山との摩擦を防止し、構築した管渠と周辺地山との隙間を無くした小口径推進工法を提案する。
【解決手段】予め、管渠の構築予定路に沿ってロッド4を挿通しておき、このロッド4に掘進機5を接続し、ロッド4を引き込むことによって掘進機5が拡径しながら進行する。地中を進行する掘進機5に後続して、前端を外側に折り返して反転させた可撓性のチューブ体6を配設し、前記チューブ体6の内側に流体を送給して、反転させたチューブ体6を外側に押し広げ、掘進機5の進行に伴ってチューブ体6を繰り出すことにより折り返し部分6bを前進させた後、前記チューブ体5を硬化させて管渠を構築する。
(もっと読む)
小口径管曲線推進装置及び小口径管曲線推進工法
【課題】掘進機後退時の引抜き鋼棒による管内設備やカメラの破損を防止する。
【解決手段】カメラ2a,2b(光学式カメラ測量センサー)とターゲット2cを設置したカメラユニット2と、カメラユニット2を走行させるレール体3とを備えた撮像ユニット4を連結し、ターゲット2cをカメラ2a,2bで撮像することにより掘進機Kの位置と方向を計測し、この計測結果に基づいて小口径管5の曲線推進行い、外周面に雄ねじ6を有する引抜き鋼棒7と、雄ねじ6と遊嵌する雌ねじ8を内周面に有し引抜き鋼棒7を遊嵌状態で連結させるカプラ9と、を備え、引抜き鋼棒7をカプラ9で遊嵌することにより発進立坑Hから掘進機Kまで引抜き鋼棒7を曲線状に配置し、引抜き鋼棒7の位置を上部から下部に変換する位置変換アタッチメント10を掘進機Kと撮像ユニット4の間に介装する。
(もっと読む)
シールド機
【課題】テールプレートのひずみ及びテールエンドクリアランスを測定可能なシールド機及びクリアランス測定方法を提供する。
【解決手段】油圧ジャッキ17の押圧部13にはクリアランス計15が設置される。クリアランス計15は、スキンプレート3内周面とセグメント9の外周面の隙間であるテールクリアランス25を測定する。テールプレート11にはひずみ計21とストローク計23が設置される。ひずみ計21は、テールプレート11のひずみを測定するためのものであり、テールプレート11のスキンプレート3側と、テールプレート11後端部に2箇所設置される。ストローク計23は、テールプレート11後端の内周面とセグメント9外周面の隙間であるテールエンドクリアランス27を測定する為のもので、テールプレート11の後端部内面に設置される。
(もっと読む)
推進管情報管理システム
【課題】推進工法に適用されてそのまま管路となる推進管の履歴を施工時以降も管理可能として、当該推進管の高度な品質管理と供用後の維持管理性を向上することが可能な推進管情報管理システムを提供する。
【解決手段】推進工法に用いられて坑内で位置が遷移する推進管4個々に、それらに個別の情報を記録したIDシール8を貼り付け、製造後から施工前までの適宜時点で、推進管それぞれのIDシールの情報を管理室のコンピュータのデータベースソフトに蓄積して、推進管の管理用データベースを作成するようにした推進管情報管理システムであって、少なくとも推進管の内周面4bに貼り付けられるIDシールと、管理用データベースに推進管個々の施工時以降における情報を追加するために、推進管内周面のIDシールをカメラ機能で読み取ってコンピュータに送信する携帯電話10とを備えた。
(もっと読む)
掘削孔用装置
【課題】掘削孔用装置に搭載された慣性センサからの慣性データ信号における不要な振動に対して減衰効果を与える電子回路を提供する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
(もっと読む)
トンネル掘進システム、水平方向測定方法
【課題】トンネル掘進機の水平方向を測定できるようにする。
【解決手段】本発明の水平方向測定方法は、非開削で地中を掘削するトンネル掘進機の水平方向を地上で測定する。水平方向測定方法では、トンネル掘進機の先導体内に、当該先導体の進行方向に対してあらかじめ定めた角度だけ異なる水平方向に磁力線が向くように磁界を発生させる発信部を取り付けておく。そして、地上で、磁界測定ステップと水平方向検出ステップを行う。磁界測定ステップは、磁力線を検出する受信コイルの鎖交面の法線方向を水平に維持して、鎖交面の法線方向が変化するように回転させながら、受信コイルに生じる電圧を測定する。水平方向検出ステップは、測定した電圧が最小となるときの鎖交面の法線方向に垂直な水平方向に対して前記あらかじめ定めた角度だけ異なる水平方向を検出する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 所定位相の電磁波を発振する発振手段と、符号発生手段からの符号信号と上記電磁波とを合成し、合成電磁波を生ずる合成手段と、上記シールド掘進機に設けられ、上記合成電磁波に対応した磁場を形成して送出する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場を検出して上記合成電磁波を受信する受信手段と、受信された合成電磁波を上記符号信号と同期した符号信号を用いて波形反転演算を行ない、上記所定位相の電磁波と同位相の電磁波を取り出す演算手段と、上記演算手段によって取り出された電磁波の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機の後方に埋設管を結合した推進体を立抗から掘削しながら推進させ、上記埋設管によって形成される管路を敷設する推進シールド工法において、上記シールド掘進機に電磁波を送信する送信コイルを装着し、上記シールド掘進機の到達予定位置に上記電磁波の受信コイルを設けると共に、上記受信コイルを上記立抗に向かって延在する軸に対して回転し得るように形成し、上記受信コイルの受信強度にもとづいて上記シールド掘進機を上記受信コイル位置に誘導するようにした構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機に設けられ、所定位相の磁場を形成する電磁波を送信する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場と、上記磁場に起因する誘導電流によって形成された位相の異なる磁場との合成磁場に対応した電磁波を受信する受信手段と、受信された電磁波をフーリェ変換することにより上記磁場に対応する成分と上記位相の異なる磁場に対応する成分とに分離する分離手段と、分離された上記所定位相の磁場に対応する成分の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
削孔機における先端ビットの偏位方向検出装置及び削孔方法
【課題】 削孔管の先端に取り付けた先端ビットの向きを正確に検出することにより、精度の高い削孔を行うことが可能な、削孔機における先端ビットの偏位方向検出装置及び削孔方法を提供する。
【解決手段】 削孔管20の先端部に設けた先端ビット40に取り付けた固定磁石部60と、固定磁石部60に対向するように、削孔管20内に挿入するジャイロスコープ30の先端部に取り付けられ、当該ジャイロスコープ30の中心軸方向を回転軸として回転可能であり、固定磁石部60との間に生じる吸引力及び反発力により、固定磁石部60に対して所定位置に停止する回転磁石部70と、回転磁石部70の回転角度を計測する回転角度計測器80と、を備える。
(もっと読む)
掘進機の位置確認方法、掘進機
【課題】地中を掘進する掘進機の位置確認を、構造簡単にして低コストに、且つ、正確に行う。
【解決手段】シールド掘進機1Aには、基準位置に対する相対位置情報が表示された表示面を裏側にしてターゲットプレート(面板9A)が設けられている。2台のシールド掘進機の距離が所定距離に縮まった状態で、シールド掘進機1Bの側からボーリングロッド21によりボーリングし、面板9Aを穿孔してサンプリング片を採取する。当該サンプリング片の表示内容により当該サンプリング片の前記基準位置からのずれ量を求め、これをもとにシールド掘進機1Aとシールド掘進機1Bとの相対位置を確認する。
(もっと読む)
土中位置誘導方法および土中位置誘導システム
【課題】 シールドマシン等の掘進機を土中で到達目標に誘導する土中位置誘導方法および土中位置誘導システムを提供する。
【解決手段】 後着機1bの走行軌跡を記録し、当該記録した走行軌跡から後着機1bの進行方向を算出し、後着機1bの到達目標である先着機1aに対する相対位置を算出し、当該算出した相対位置を到達目標を中心とした座標系における位置に変換し、当該変換した座標系での後着機1bの位置および進行方向に基づいて、後着機1bを到達目標の方向へ誘導するための誘導データを作成し、相対位置と進行方向と誘導データの内容とを表示するための誘導指示画面を作成して表示する。
(もっと読む)
掘進機同士の地中接合方法および掘進機の位置検出方法
【課題】簡易かつ安価に掘進機同士の地中における接合を行うことを可能とした掘進機同士の地中接合方法と、停止状態の掘進機を利用して他の掘進中の掘進機の位置を簡易かつ安価に検出することを可能とした掘進機の位置検出方法を提案する。
【解決手段】停止状態の第一掘進機1に向けて、第二掘進機2を掘進させることで第一掘進機1と第二掘進機2との接続を行う掘進機同士の地中接合方法であって、第一掘進機1から放射状に形成された少なくとも4本のボーリング孔13,13,…にそれぞれ計測基準点12を設ける工程と、各計測基準点12と第二掘進機2の面板21に設けられた機械基準点22との距離を弾性波により測定する工程と、各計測基準点12と機械基準点22との距離により第二掘進機2の掘進方向を調整しながら掘進させる工程と、を備えている。
(もっと読む)
連結構造及び連結方法
【課題】地中掘削に用いられる管状部材を回転させずに当該管状部材の端部同士の連結を容易にする連結構造及び連結方法を提供する。
【解決手段】連結構造3は、地盤の掘削に用いられるボーリングマシンの端部同士を連結する連結構造であって、第一雄ネジ部313が外周部312に設けられた第一ボーリングマシン311と、第二雄ネジ部323が外周部322に設けられた第二ボーリングマシン321と、第一ボーリングマシン311の第一雄ネジ部313、及び、第二ボーリングマシン321の第二雄ネジ部323に螺合する管状雌ネジ部材331と、を備える。連結構造3によれば、管状雌ネジ部材331のみを回転させることだけで、第一ボーリングマシン311も第二ボーリングマシン321も回転させずに、これらボーリングマシンの端部同士の地中連結を容易に行うことができ、作業効率の向上が可能となる。
(もっと読む)
掘削位置測定具
【課題】掘削孔の形状に関わらず掘削位置を十分に効率的且つ高い精度で測定できる掘削位置測定具を提供すること。
【解決手段】本発明の掘削位置測定具40Aは、先端面10cにビット部材10dを備える掘削機10によって地中に掘削孔80を形成する際に使用されるものであって、所定の長さ及び形状を有し、一端が掘削機10に固定され、他端が坑口80aから外側に突出するように配置される被計測ロッド25と、この被計測ロッド25を収容する容器35と、この容器35中に収容されて被計測ロッド25を浮遊させる液体50と、を備える。
(もっと読む)
地中位置検知方法
【課題】簡易な構造で、地上障害物に影響されることなく、掘削装置の地中位置を容易に検知することができる地中位置検知方法を提供する。
【解決手段】掘削装置1の地中位置を検知する地中位置検知方法において、掘削装置1に磁石2を設け、この磁石2を、掘削装置1の軸方向に伸びるy軸と直交するx軸およびz軸を含む平面上で回転させることで回転磁場を発生させ、少なくとも三つの測点P1,P2,P3で磁石2が発生させる回転磁場の磁束密度のx軸成分およびz軸成分をそれぞれ時刻暦として測定し、x軸成分およびz軸成分より各測点P1,P2,P3間の位相差をそれぞれ算出し、得られた位相差を、各測点を前記原点を含むxz平面にそれぞれ投影した各投影点から磁石2の位置を見込む見込み角度とみなし、この見込み角度より磁石2の位置のx座標およびz座標を算出し、他方、掘削装置1の掘削距離より磁石2の位置のy座標を算出する。
(もっと読む)
1 - 20 / 32
[ Back to top ]