
Fターム[2D054GA20]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 制御目的 (383) | 遠隔操作 (14)
Fターム[2D054GA20]に分類される特許
1 - 14 / 14
埋設管推進装置
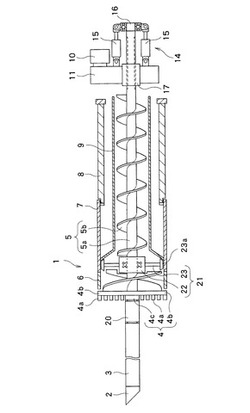
【課題】埋設精度が高く長距離の掘削が可能な埋設管推進装置を提供する。
【解決手段】埋設管推進装置は、第1工程と第2工程とからなる二工程式による埋設管(8)の埋設に使用する埋設管推進装置であって、第1工程で誘導穴をあけるために使用可能な誘導管(3)と、誘導管に接続される第2工程で使用されるカッターヘッド(4)と、カッターヘッドの後部に配置されるカッター口部(6)と、カッター口部の後部に位置し、埋設管を案内可能な先導管(7)と、カッターヘッドに取付けられ、カッター口部内及び先導管内に配設されたスクリュー部(5)と、スクリュー部を回転可能にカッター口部に支持するためのヘッド支持部(21)とを備えることを特徴とする。
(もっと読む)
掘進機

【課題】地中に推進管を埋設するために用いられる掘進機および方向修正装置の耐久性を向上する。
【解決手段】カッターヘッドを備えた先頭体と、本体と、先頭体を支持する方向修正装置とを備えており、方向修正装置は、掘進機の本体の先端付近に備えられるジャッキシリンダと、掘進機の先頭体の後端付近に備えられるジョイントとを有しており、ジャッキシリンダは、本体の内側面に設置された支持台に設けられた貫通孔と、ジャッキシリンダの貫通孔とに軸を挿通することで、少なくとも上下方向に回転駆動可能であり、その前端部には、先端付近が球体または略球体状に成形されたシリンダロッドを備えており、ジョイントは、その内面が、シリンダロッドの球体または略球体と同一またはほぼ同一の大きさの球面または略球面に成形されており、ジョイントの内面とシリンダロッドの球体または略球体とが嵌合することにより、掘進機の先頭体を首振り自在に支持する。
(もっと読む)
トンネル掘進システム、水平方向測定方法
【課題】トンネル掘進機の水平方向を測定できるようにする。
【解決手段】本発明の水平方向測定方法は、非開削で地中を掘削するトンネル掘進機の水平方向を地上で測定する。水平方向測定方法では、トンネル掘進機の先導体内に、当該先導体の進行方向に対してあらかじめ定めた角度だけ異なる水平方向に磁力線が向くように磁界を発生させる発信部を取り付けておく。そして、地上で、磁界測定ステップと水平方向検出ステップを行う。磁界測定ステップは、磁力線を検出する受信コイルの鎖交面の法線方向を水平に維持して、鎖交面の法線方向が変化するように回転させながら、受信コイルに生じる電圧を測定する。水平方向検出ステップは、測定した電圧が最小となるときの鎖交面の法線方向に垂直な水平方向に対して前記あらかじめ定めた角度だけ異なる水平方向を検出する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 所定位相の電磁波を発振する発振手段と、符号発生手段からの符号信号と上記電磁波とを合成し、合成電磁波を生ずる合成手段と、上記シールド掘進機に設けられ、上記合成電磁波に対応した磁場を形成して送出する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場を検出して上記合成電磁波を受信する受信手段と、受信された合成電磁波を上記符号信号と同期した符号信号を用いて波形反転演算を行ない、上記所定位相の電磁波と同位相の電磁波を取り出す演算手段と、上記演算手段によって取り出された電磁波の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機の後方に埋設管を結合した推進体を立抗から掘削しながら推進させ、上記埋設管によって形成される管路を敷設する推進シールド工法において、上記シールド掘進機に電磁波を送信する送信コイルを装着し、上記シールド掘進機の到達予定位置に上記電磁波の受信コイルを設けると共に、上記受信コイルを上記立抗に向かって延在する軸に対して回転し得るように形成し、上記受信コイルの受信強度にもとづいて上記シールド掘進機を上記受信コイル位置に誘導するようにした構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機に設けられ、所定位相の磁場を形成する電磁波を送信する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場と、上記磁場に起因する誘導電流によって形成された位相の異なる磁場との合成磁場に対応した電磁波を受信する受信手段と、受信された電磁波をフーリェ変換することにより上記磁場に対応する成分と上記位相の異なる磁場に対応する成分とに分離する分離手段と、分離された上記所定位相の磁場に対応する成分の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
シールドジャッキの圧力制御装置
【課題】同時掘進中に油圧ラインを切り換える必要がなく、マシンの挙動を乱すことなく方向制御し得るシールドジャッキの圧力制御装置を提供する。
【解決手段】圧油供給ライン15と、圧油供給ライン15をシールドジャッキ11に接続する第一制御圧力側ライン24と、第一制御圧力側ライン24に設けられ、第一制御圧力側ライン24内の油圧を可変に減圧する第一減圧弁26と、第一減圧弁26より下流の第一制御圧力側ライン24に設けられた第一開閉弁27と、圧油供給ライン15をシールドジャッキ11に接続する第二制御圧力側ライン25と、第二制御圧力側ライン25に設けられ、第二制御圧力側ライン25内の油圧を可変に減圧する第二減圧弁29と、第二減圧弁29より下流の第二制御圧力側ライン25に設けられた第二開閉弁30とを備える。
(もっと読む)
掘削位置測定具
【課題】掘削孔の形状に関わらず掘削位置を十分に効率的且つ高い精度で測定できる掘削位置測定具を提供すること。
【解決手段】本発明の掘削位置測定具40Aは、先端面10cにビット部材10dを備える掘削機10によって地中に掘削孔80を形成する際に使用されるものであって、所定の長さ及び形状を有し、一端が掘削機10に固定され、他端が坑口80aから外側に突出するように配置される被計測ロッド25と、この被計測ロッド25を収容する容器35と、この容器35中に収容されて被計測ロッド25を浮遊させる液体50と、を備える。
(もっと読む)
地中位置検出装置
【課題】ボーリング等による地中掘削時にリアルタイムで精度よく地中の掘削先端位置を把握できる地中位置検出装置を提供する。
【解決手段】掘削機の掘削先端部に設置される発信器1の1次励磁コイル2から発信された磁気信号によって、受信器11の3台の3軸検出コイル12、13、14のそれぞれのX軸コイル、Y軸コイル、Z軸コイルに誘起電圧が誘起され、この誘起電圧に基づいて制御装置18が発信器1(掘削先端位置)を示す位置データを算出して表示装置17に表示するとともに、発信器1の温度センサ3、ピッチ角度センサ4、ロール角度センサ5のセンサ信号をセンサ用アンテナ15が受信し、制御装置18が検知温度、検知ピッチ角度、検知ロール角度を算出して表示装置17に表示する。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置
【課題】 推進オペレータ自らがカッタヘッド案内装置のローリング量を確認し、カッタヘッド案内装置制御手段の操作もその場で行え、作業性の優れた既設埋設管破砕用カッタヘッド案内装置を提供する。
【解決手段】 カッタヘッド案内装置100にローリング量自動計測手段90を備え、且つ発進坑内3又は推進オペレータ用操作盤85にローリング量表示と、カッタヘッド案内装置100の上下方向揺動手段60及び水平方向揺動手段70の操作機能と、を配すると共に、カッタヘッド案内装置100自体に駆動用油圧ユニット付制御手段80を搭載する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】従来のようにターゲットからの反射光を利用せずに距離の計測やシールド掘進機の位置や姿勢の確認ができ、中間計測機に傾斜計等を搭載しやすい構成とし、更に中間計測機の埋設管内での移動がスムースにできるシールド掘進機の推進方向制御装置を提供する。
【解決手段】シールド掘進機1に設けられ、後方に向けて発光する面光源からなるターゲット1Bと、シールド掘進機の水平方向または埋設管の延長方向の傾斜角度を計測する傾斜計1Cと、立抗4内に設けられターゲットの発光を撮像してターゲットの変位量を確認するカメラまたは撮像装置5と、カメラまたは撮像装置によって確認されたターゲットの変位量と距離と傾斜計の角度とにもとづいてシールド掘進機の位置及び姿勢を求める演算手段26とを備え、演算手段の演算結果にもとづいてシールド掘進機の推進方向と、推進計画線との誤差を演算し、シールド掘進機の推進方向を制御するもの。
(もっと読む)
掘削機並びに掘削システム及び掘削方法
【課題】 トンネルの掘削を行うにあたり熟練度を必要とせず、掘削作業を安全に行うことができる掘削システムを提供する。
【解決手段】 上記目的を達成するための掘削システムは、拡散型のレーザを照射する3次元レーザレーダと、掘削機に備えられた掘削手段や駆動手段を動作させる駆動制御装置と、を備えた掘削機と、前記掘削機の動作を監視、あるいは掘削機を遠隔操作する操作・監視手段と、前記3次元レーザレーダに対して制御信号を出力すると共に3次元画像作成情報を得、当該3次元画像作成情報に従って3次元画像データを作成し、作成された3次元画像データを前記操作・監視手段に送信し、前記3次元画像に基づいて計測対象面の掘削箇所を特定し、特定した掘削箇所を掘削する旨の信号を前記駆動制御装置へ出力する演算装置と、を備えたことを特徴とする。
(もっと読む)
鋼管削進機および地中推進工法
【課題】この発明は、上部の狭い発進坑においても、容易に土中管路を形成することができる鋼管削進機および地中推進工法を提供することを目的とする。
【解決手段】上述の課題を解決するため、この発明の鋼管削進機1は、レール7と、レール上を進退するスライド部材8と、鋼管を地中に押込む移動部2を有し、スライド部材8と移動部2が着脱可能に接続されることを特徴とするものであり、固定部3と、移動部2とをそれぞれ分離した状態で発進坑に搬入し、発進坑内で固定部3と移動部2とを接続して鋼管削進機1を組立て、この鋼管削進機1によって鋼管を発進坑から地中に挿入し、鋼管の挿入が終了したら固定部3と移動部2を切り離してそれぞれ分離して発進坑から搬出するものである。
(もっと読む)
シールド掘進機・カッタ駆動軸のスラスト荷重検出装置とその荷重検出方法
【課題】 掘進作業過程における前面荷重、即ちカッタ駆動軸に作用するスラスト荷重を精度よく検出することにより、作業中における前面荷重の正確な値を把握する。
【解決手段】 掘進作業過程におけるカッタ駆動軸3に作用するスラスト荷重を検出するシールド掘進機・カッタ駆動軸のスラスト荷重検出装置であって、カッタ駆動軸3の内部に設けた、スラスト荷重を検出する荷重せンサ6を具備する駆動軸変位/ひずみ変換・増幅ロッド5と、シールド掘進機操作盤に設けた、実測荷重値を明示するために、ひずみ測定器を内蔵した荷重監視・記録装置12と、を備えたものである。
(もっと読む)
1 - 14 / 14
[ Back to top ]