
Fターム[2D054GA62]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 方向、方位、角度 (101)
Fターム[2D054GA62]に分類される特許
21 - 40 / 101
トンネル切羽前方探査装置
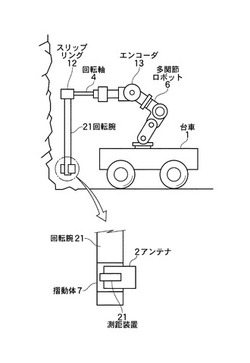
【課題】正確にトンネル前方の地中の状態を探査できる装置を提供する。
【解決手段】トンネル切羽前方の地盤内を探査する装置であって、台車1と、台車1に搭載し、円の軌跡上を移動する電磁レーダーのアンテナ2と、アンテナ2の軌跡上の位置を知る回転角発生装置と、電磁レーダーのアンテナ2と切羽との距離を測定する測距装置21と、アンテナ2の切羽側に位置した板体であって、アンテナ2の移動方向の前方をソリ状に形成した摺動体7と、摺動体7のトンネル軸方向への移動を許容する伸縮治具と、データを収録、解析する解析装置とより構成した。
(もっと読む)
掘削孔用装置

【課題】掘削孔用装置に搭載された慣性センサからの慣性データ信号における不要な振動に対して減衰効果を与える電子回路を提供する。
【解決手段】指向性装置22はゾンデの形状の円筒ハウジング32を有する。従来型のバッテリーパック43と指向性装置34とがハウジング32の内部に搭載されている。三つの減衰回路36、ADC38、信号処理回路40、MWD遠隔測定ユニット42、三つの慣性センサ44、46、48、及び三つの磁力計44’、46’、48’などの部品が指向性装置の内部に搭載されている。慣性センサのそれぞれに一つが対応するよう減衰回路36がある。指向性装置が掘削による振動をうけると、加速度計からの出力電流は、その上に重ねられた周期的又は非周期的なAC様の波形を有する。しかし減衰回路のコンデンサのリアクタンスは周波数と共に増加し、低域フィルターは出力電流中のそのようなAC周波数成分を地面へと短絡する。
(もっと読む)
トンネル掘進システム、水平方向測定方法
【課題】トンネル掘進機の水平方向を測定できるようにする。
【解決手段】本発明の水平方向測定方法は、非開削で地中を掘削するトンネル掘進機の水平方向を地上で測定する。水平方向測定方法では、トンネル掘進機の先導体内に、当該先導体の進行方向に対してあらかじめ定めた角度だけ異なる水平方向に磁力線が向くように磁界を発生させる発信部を取り付けておく。そして、地上で、磁界測定ステップと水平方向検出ステップを行う。磁界測定ステップは、磁力線を検出する受信コイルの鎖交面の法線方向を水平に維持して、鎖交面の法線方向が変化するように回転させながら、受信コイルに生じる電圧を測定する。水平方向検出ステップは、測定した電圧が最小となるときの鎖交面の法線方向に垂直な水平方向に対して前記あらかじめ定めた角度だけ異なる水平方向を検出する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機に設けられ、所定位相の磁場を形成する電磁波を送信する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場と、上記磁場に起因する誘導電流によって形成された位相の異なる磁場との合成磁場に対応した電磁波を受信する受信手段と、受信された電磁波をフーリェ変換することにより上記磁場に対応する成分と上記位相の異なる磁場に対応する成分とに分離する分離手段と、分離された上記所定位相の磁場に対応する成分の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 所定位相の電磁波を発振する発振手段と、符号発生手段からの符号信号と上記電磁波とを合成し、合成電磁波を生ずる合成手段と、上記シールド掘進機に設けられ、上記合成電磁波に対応した磁場を形成して送出する送信手段と、上記シールド掘進機の到達予定位置に設けられ、上記磁場を検出して上記合成電磁波を受信する受信手段と、受信された合成電磁波を上記符号信号と同期した符号信号を用いて波形反転演算を行ない、上記所定位相の電磁波と同位相の電磁波を取り出す演算手段と、上記演算手段によって取り出された電磁波の強度に応じて上記シールド掘進機を上記到達予定位置に誘導する制御手段とを備えた構成。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】 電磁波を用いてシールド掘進機の位置や姿勢の確認を行ない、到達予定位置まで正確に誘導することができる推進シールド工法におけるシールド掘進機の掘進方向制御装置を提供する。
【解決手段】 シールド掘進機の後方に埋設管を結合した推進体を立抗から掘削しながら推進させ、上記埋設管によって形成される管路を敷設する推進シールド工法において、上記シールド掘進機に電磁波を送信する送信コイルを装着し、上記シールド掘進機の到達予定位置に上記電磁波の受信コイルを設けると共に、上記受信コイルを上記立抗に向かって延在する軸に対して回転し得るように形成し、上記受信コイルの受信強度にもとづいて上記シールド掘進機を上記受信コイル位置に誘導するようにした構成。
(もっと読む)
削孔管の先端位置測定方法および先端位置測定システム
【課題】小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置の測定が可能な削孔管の先端位置測定方法および先端位置測定システムの提供。
【解決手段】地中を削孔しながら推進する削孔管Cの先端位置を測定する方法であって、前記削孔管Cの推進方向後端側に受信器30を設けると共に、前記削孔管Cの先端が推進する地中の所定の位置に複数の発信器20を埋設しておき、前記各発信器20から前記削孔管Cの先端方向に測定用音波を発信して当該削孔管Cを伝播する各測定用音波を前記受信器30によって受信した後、受信した各測定用音波を解析して前記削孔管Cの先端位置を測定する。これによって、小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置を測定できる。
(もっと読む)
削孔機における先端ビットの偏位方向検出装置及び削孔方法
【課題】 削孔管の先端に取り付けた先端ビットの向きを正確に検出することにより、精度の高い削孔を行うことが可能な、削孔機における先端ビットの偏位方向検出装置及び削孔方法を提供する。
【解決手段】 削孔管20の先端部に設けた先端ビット40に取り付けた固定磁石部60と、固定磁石部60に対向するように、削孔管20内に挿入するジャイロスコープ30の先端部に取り付けられ、当該ジャイロスコープ30の中心軸方向を回転軸として回転可能であり、固定磁石部60との間に生じる吸引力及び反発力により、固定磁石部60に対して所定位置に停止する回転磁石部70と、回転磁石部70の回転角度を計測する回転角度計測器80と、を備える。
(もっと読む)
推進工法および地中管路
【課題】余堀りを行いながら地中に所定長さの地中管路を形成していく推進工法において、推進管群に蛇行が生じさせないようにする。
【解決手段】余堀りを行いながら地中に所定長さの地中管路を形成していく推進工法であって、始点aおよび終点bである地中管路20を形成するに際し、緩和曲線領域Y1,Y2が形成されるように掘進機を進行させる。緩和曲線領域Y1とY2の間を単曲線領域Xで接続する。直線領域が少ないので、余掘りした掘削穴内で推進管群が蛇行するのを防ぐことができる。
(もっと読む)
矩形掘進機のローリング修正装置
【課題】 推進工法に用いる矩形掘進機において、支持力が少ない地盤でも掘削機本体のローリングを確実に修正できるようにする。
【解決手段】 断面矩形状の外殻の前部に地盤を断面矩形状に掘削するカッターを設けた掘削機本体10と、掘削機本体10の外殻の前端に外周方向へ回動可能に設けられる断面矩形状のフード20と、掘削機本体10の外殻の後端に外周方向へ回動可能に設けられるアダプター30と、そのアダプター30に接続される断面矩形状の函体と、フード20及びアダプター30を回動させる左右の油圧ジャッキ23,33と、掘削機本体10の外周方向の傾きを検知するローリング検知器とで構成し、掘進時にローリング検知器がローリングを検知すると上下又は左右に配置された油圧ジャッキ23,33を相対する方向へ押圧させてフード20及びアダプター30を水平の姿勢へ戻すように回動させる。
(もっと読む)
掘削孔曲がり度測定装置及びそれを用いた掘削孔曲がり度測定方法
【課題】口径が比較的小径で、曲がりがあるために見通しができない形状の掘削孔の曲がり度を、掘削孔の内部環境による影響を受けることなく、しかも、手間を要することなく、簡便に正確な測定ができる掘削孔の曲がり度測定装置及びそれを用いた掘削孔の曲がり度測定方法を提供する。
【解決手段】掘削孔内に挿入されて掘削孔の曲がり度に応じて曲がり可能にされた内部空洞の筒体20と、この筒体20の一端部側に配置されて筒体20の他端部側に向けてレーザー光を照射するレーザー発光部22と、筒体20の他端部側に設置されてレーザー発光部22からのレーザー光が照射されるスクリーン24と、スクリーン24よりも他端部側に配置されてスクリーン24を撮像する撮像手段26と、撮像手段26の撮像データを伝送する伝送手段28と、伝送された撮像データに基づいて筒体20先端の位置ずれを算出する制御装置とを有する。
(もっと読む)
3次元レーザスキャナを用いたトンネル掘削施工支援システム
【課題】トンネル掘削工事の作業が煩雑になることなく簡便に断面の計測、掘削断面、覆工断面の評価、管理を行うことができ、工期の短縮、施工精度の向上を図る。
【解決手段】トンネル壁面の複数箇所に設置されるターゲットのトンネル座標のデータ記憶手段と、トンネル断面の基準データ記憶手段と、比較断面の表示属性のデータ記憶手段と、3次元の計測データのターゲットの位置を認識してターゲットのスキャナ座標とデータ記憶手段に格納されたトンネル座標を求める認識処理手段と、ターゲットのスキャナ座標およびトンネル座標に基づき座標変換パラメータを求めスキャナ座標の計測データをトンネル座標の計測データに変換する座標変換処理手段と、トンネル座標の計測データと基準データとを比較演算して比較断面データを求める比較演算処理手段と、出力処理手段とを備え、表示属性のデータ203と比較断面データ208に基づき比較断面の情報を出力する。
(もっと読む)
推進工法用測量装置
【課題】 埋設管を地中に直接埋設する推進工法で、掘進機を曲進させた掘進路線でも安定して測量することができる低コストの推進工法用測量装置を提供すること。
【解決手段】 埋設管の内部に、軸方向に貫通する空間を有するインナー管8を挿通し、発進立坑に設置した元押装置で掘進機205に推進力を与えて掘削する地中に前記埋設管を埋設して管路を形成する推進工法における測量装置1に、前記インナー管8の貫通する空間を自走する起動台車71と、該起動台車71に連なって前記インナー管8の空間の軸方向に敷設したレール12に沿って走行する測量ジャイロ台車76と、前記掘進機205の発進立坑方向に配設した、前記起動台車71を収納する起動台車収納管2と、前記測量ジャイロ台車76の測量終点となるステーション管5と、前記発進立坑で前記測量ジャイロ台車76の測量始点を設定するランチャーとを備えさせる。
(もっと読む)
推進工法用測量ロボット装置
【課題】 埋設管を地中に直接埋設する推進工法で、掘進機を曲線推進させた路線でも安定して測量することができる低コストの推進工法用測量ロボット装置を提供すること。
【解決手段】 埋設管の内部に、軸方向に貫通する空間を有するインナー管8を挿通し、発進立坑に設置した元押装置で掘進機に推進力を与えて掘削した地中に前記埋設管を埋設して管路を形成する推進工法における測量ロボット装置70に、前記インナー管8の貫通する空間10を自走する起動台車71と、この起動台車71に連なって前記インナー管8の空間10の軸方向に敷設した1本のレール12に沿って走行する測量ジャイロ台車76とを備えさせ、この起動台車71と測量ジャイロ台車76とは屈曲可能に連結され、前記起動台車71は、自走して前記測量ジャイロ台車76を牽引する駆動機72と、距離計測器74と、起動台車制御器75とを有し、前記測量ジャイロ台車76は、ジャイロ77と、ジャイロデータ収集器79とを有しているようにする。
(もっと読む)
シールド機およびシールド機の制御方法
【課題】 単一のカッタによって、前方の地山を任意の形状に掘削可能であり、シールド機の姿勢や進行方向などの制御を容易に行うことができるシールド機およびシールド機の制御方法を提供する。
【解決手段】 隔壁5には、回転体21が設けられる。回転体21の前面には、フレーム25が設けられる。回転体21にはフレーム25を回転させるためのフレームモータ27が設けられる。フレーム25の一方の端部は、フレーム回転軸35を中心に回転可能なように回転体21に接合され、フレーム25は、回転体21に対して異なる回転軸で回転動作が可能である。フレーム25の回転体21との接合部とは反対側の端部近傍に、複数の刃を有するカッタ29が設けられる。フレーム25にはカッタモータ31が設けられ、カッタ29は、カッタ回転軸37を中心に回転可能である。なお、カッタ回転軸37はフレーム回転軸37および回転体回転軸33に対し偏心している。
(もっと読む)
ジャイロ式測位システム
【課題】2基のジャイロセンサで方位を検出できるようにしたジャイロ式測位システムを実現する。
【解決手段】ピッチ方向とヨー方向の2基のジャイロセンサ15,16を取り付けた細長い台板14の両端を、支持軸から偏心させて管状のケーシング10に回転自由に取り付けたジャイロヘッド1と、ジャイロヘッド1の送り込み量を検知するエンコーダによる距離情報から掘進ヘッドの位置ならびに軌跡を検出する。直交3軸方向のうち、ジャイロセンサを1基省略できるので装備も計算も簡単になり、掘進作業が効率化される。
(もっと読む)
掘進機の位置確認方法、掘進機
【課題】地中を掘進する掘進機の位置確認を、構造簡単にして低コストに、且つ、正確に行う。
【解決手段】シールド掘進機1Aには、基準位置に対する相対位置情報が表示された表示面を裏側にしてターゲットプレート(面板9A)が設けられている。2台のシールド掘進機の距離が所定距離に縮まった状態で、シールド掘進機1Bの側からボーリングロッド21によりボーリングし、面板9Aを穿孔してサンプリング片を採取する。当該サンプリング片の表示内容により当該サンプリング片の前記基準位置からのずれ量を求め、これをもとにシールド掘進機1Aとシールド掘進機1Bとの相対位置を確認する。
(もっと読む)
異形断面トンネル掘削機及び異形断面トンネル掘削方法
【課題】簡単な構造であって低コストで製造でき、且つ耐久性が向上して寿命が延びる異形断面トンネル掘削機及び異形断面トンネル掘削方法を提供する。
【解決手段】カッタヘッド5が1回転する間に、カッタヘッド5の回転角度θに応じてカッタジャッキ8のストロークstを制御することで、掘削断面を円形以外の異形断面とする。カッタヘッド5の回転に伴い移動カッタ7に接続されたカッタジャッキ8の側部が軸受部9に押し付けられて軸受部9に生じる面圧をPとし、移動カッタ7の移動に伴い伸縮するカッタジャッキ8の側部が軸受部9に摺接する速度をVとすると、面圧Pに速度Vを乗じた値が、カッタヘッド5が1回転する間、常に所定値以下となるように、カッタヘッド5の回転速度Nとカッタジャッキ8の伸縮速度Vとを、カッタヘッド5が1回転する間の回転角度θに応じて制御する。
(もっと読む)
土中位置誘導方法および土中位置誘導システム
【課題】 シールドマシン等の掘進機を土中で到達目標に誘導する土中位置誘導方法および土中位置誘導システムを提供する。
【解決手段】 後着機1bの走行軌跡を記録し、当該記録した走行軌跡から後着機1bの進行方向を算出し、後着機1bの到達目標である先着機1aに対する相対位置を算出し、当該算出した相対位置を到達目標を中心とした座標系における位置に変換し、当該変換した座標系での後着機1bの位置および進行方向に基づいて、後着機1bを到達目標の方向へ誘導するための誘導データを作成し、相対位置と進行方向と誘導データの内容とを表示するための誘導指示画面を作成して表示する。
(もっと読む)
函体施工方法
【課題】既設の構造物への影響を抑えながら既設の構造物の上方に函体を設置できる函体施工方法を提供する。
【解決手段】地下構造物3が埋設された地山Mに新たな函体1を順次繋ぎ合わせながら推進させるための函体施工方法において、函体1を設置するために既設の地下構造物3の周囲の地山を掘削し、その掘削に伴って生じる地下構造物3の変位に基づいて、地下構造物3の上方の地山Mを掘削した際の地下構造物3への影響を評価する評価値(浮き上がり量L)を求め、評価値が第1の閾値以上の場合には、少なくとも地下構造物3の上方を函体1で横切る際に、掘削によって撤去される土砂と函体1の自重とをバランスさせるためのウエイト9を地下構造物3の上方に設置した状態で函体1を推進させ、評価値が第1の閾値未満の場合には、少なくとも地下構造物3の上方を函体1で横切る際に、ウエイト9を設置することなく函体1を推進させる。
(もっと読む)
21 - 40 / 101
[ Back to top ]