
Fターム[2D054GA62]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 方向、方位、角度 (101)
Fターム[2D054GA62]に分類される特許
61 - 80 / 101
角度センサ
【課題】土中にあって地上から見えない掘進ヘッド等の先端部の向きを検知する。
【解決手段】ケーシング11の軸芯に対して直角に取り付けられ、正方形断面で環状の空間を形成する絶縁カラー12、13と、この空間内の1か所に互いに接近して設けられた1対の接点棒15と、空間内に収容され移動自由な1個の金属球14と、この金属球14が接点棒15の双方に同時に接触したときに回路が閉じるようにした検出回路と、回路が閉じたとき駆動されて音響を発する振動モータ16で角度センサ1を構成する。
(もっと読む)
掘進機の位置測定に用いる角度測定装置及び掘進機の推進工法

【課題】埋設管の姿勢変化により角度測定装置が水平面に対して傾斜しても、屈折角度を正確に測定できる掘進機の角度測定装置及び掘進機の推進工法を提案する。
【解決手段】埋設管内で略水平に取り付けられる取付け板11と、この取付け板11に傾斜角度変更可能に保持された傾斜補正板12と、この傾斜補正板12の傾斜角度を測定する傾斜角度測定器26A,26Bと、傾斜補正板12を水平に角度補正する補正駆動軸13A,13B及び補正モータ21A,21Bと、傾斜補正板12に保持され設計上の敷設ルートに対する屈折角度を測定する屈折角度測定器31と、この屈折角度測定器31の固定子31aと回動子31bとにそれぞれ取着された一対の測定アーム42,44と、これら一対の測定アーム42,44のそれぞれの先端部に掛止される伸縮可能な一対の弾性線材であるテグス46,48と、を備えて角度測定装置を構成した。
(もっと読む)
小口径管埋設用先導体
【課題】 200mm程度の小口径塩ビ管にも適用可能な泥濃方式で、各種条件の地山・切羽の安定、施工の高速化、立坑設備の簡素化が行なえ、長距離土砂移送効率が高く、道路開放に好適で、施工精度の高い小口径管埋設用先導体を提供する。
【解決手段】 水密状態で連結された複数の外筒からなり、前面に土砂切削装置を有し後端に小口径管を連結する先導体外筒と、掘削土砂が注入された添加材と共に攪拌された掘削流動化土砂を所定の切羽圧力が保持されるように土圧センサ及びピンチバルブにより調圧する土圧調整装置と、掘削流動化土砂を小口径管の後端に亘り内部に延設された排泥管状体を介して地上のバキューム装置によりバキューム吸引排土する排土装置と、さらに先導体外筒の上下を貫通して立設された密閉縦型筒状ケーシング内の上方部に縦型電磁コイル及びその下半部に交叉する排泥管に連結可能な排泥用通路を有する縦型誘導磁界発生装置と、を備えた。
(もっと読む)
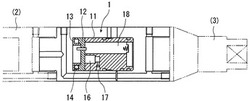
地中位置検出装置
【課題】ボーリング等による地中掘削時にリアルタイムで精度よく地中の掘削先端位置を把握できる地中位置検出装置を提供する。
【解決手段】掘削機の掘削先端部に設置される発信器1の1次励磁コイル2から発信された磁気信号によって、受信器11の3台の3軸検出コイル12、13、14のそれぞれのX軸コイル、Y軸コイル、Z軸コイルに誘起電圧が誘起され、この誘起電圧に基づいて制御装置18が発信器1(掘削先端位置)を示す位置データを算出して表示装置17に表示するとともに、発信器1の温度センサ3、ピッチ角度センサ4、ロール角度センサ5のセンサ信号をセンサ用アンテナ15が受信し、制御装置18が検知温度、検知ピッチ角度、検知ロール角度を算出して表示装置17に表示する。
(もっと読む)
相対位置検出装置、連結構造、及び連結方法
【課題】地中連結を容易にする相対位置検出装置、連結構造、及び連結方法を提供する。
【解決手段】相対位置検出装置は、第一シールド掘進機1の位置に対する第二シールド掘進機2の相対位置を検出する相対位置検出装置であって、第一シールド掘進機1に設けられ、地盤を掘削するとともに第二シールド掘進機2に向けて伸長するボーリングマシン101と、ボーリングマシン101に設けられ、第二シールド掘進機2に向けて伸長し、当該第二シールド掘進機2のカッタ部202のスリットSの間隙よりも小径の伸長部102と、伸長部102に設けられ、放射線を放射する放射部103と、第二シールド掘進機2の内部に設けられ、放射部103が放射する放射線の位置を検出する放射線検出器201と、を備える。
(もっと読む)
シールドトンネルの施工管理方法、施工管理装置、並びに、施工管理プログラム
【課題】従来のシールドトンネルの施工管理方法によれば、シールドマシンの方向制御作業を運転者の経験と勘に頼って行うので、運転者の経験や勘の違いによって、シールドマシンの方向制御作業の精度に差異が生じてしまう。
【解決手段】処理装置にシールドトンネルの施工計画線情報及びトンネル掘削施工過程でのシールドマシンの現状位置情報を入力することによってシールドトンネルの施工計画線及びシールドマシンの現状位置を出力させるとともに、処理装置にシールドマシンの現状位置からの進行予想情報を入力することによって施工計画線に対するシールドマシンの最適な進行予想位置を出力させ、この最適な進行予想位置を出力させるために処理装置に入力した進行予想情報に基づいてシールドマシンを掘進させる。
(もっと読む)
小口径管掘進用装置と掘進システム
【課題】 高価な掘進機の製作を必要とすることなく、施工単価の上昇を抑え、しかも立坑の設置を極力抑えて、直線施工とともに曲線施工を含む長距離の小口径管の推進を実現する。
【解決手段】 小口径管直線・短距離専用掘進機(A)の後端部に連結固定される前筒部(B1)と、その後端部において推進管あるいは仮管(C)に連結される後筒部(B2)とを備え、前筒部(B1)と後筒部(B2)とが曲線造成用ジャッキ部(B3)の介設により立体的に動くようにした機構を有し、後筒部(B2)には磁力線発生装置(B4)とレベル測定装置(H)とが搭載されているとともに、方向変化の計測装置が配設されている小口径管掘進用装置(B)とする。
(もっと読む)
シールド工事における地盤沈下量抑制方法
【課題】シールド機の位置と沈下性状から沈下量を予測してシールド機の掘進管理の制御をリアルタイムで行うことのできるシールド工事における地盤沈下量抑制方法を提供する。
【解決手段】路線上の沈下データ26、28、30、と、シールド機の位置を特定する位置データ34と、シールド機の掘進管理データ38とを連続して求める工程と、上記データと時間データを組み込んでシールド機の位置と沈下データ26、28、30とを関連づける工程と、前記シールド機の位置と沈下データ26、28、30との関連づけに基づいてシールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程とを含む。
(もっと読む)
掘削軌跡の測定方法及び掘削工法
【課題】掘削軌跡の測定について掘削推進機の設置位置がずれても掘削軌跡の基準方位を正しく測定する。
【解決手段】掘削推進機10で地盤に建て込んだ掘削ロッド1の管内に姿勢方位を検出する慣性センサ5を送り込む。その到達点から地上側における掘削ロッド1の地盤内固定点Pまで慣性センサ5を引き戻し、その地盤内固定点Pで測定される基準方位を掘削軌跡の地上側原点として測定する。したがって掘削推進機10の設置位置が掘削過程でずれても基準方位を正しく測定可能であり掘削軌跡を正確に測定できる。
(もっと読む)
推進工法用位置計測方法及びその装置
【課題】
複数接続された推進管の折れ角度及び方向を三次元的に即座に計測でき、各計測点の距離から推進管全体の位置を計測できる。
【解決手段】
推進工法において、掘進機1の後部に一端を固定し他端を複数の推進管2の中を通して発進立坑3内で張力をかけた測定用ワイヤ5を設け、当該測定用ワイヤ5を推進管2内の複数の位置で支持させ、当該各支持は、上記測定用ワイヤ5を遊通させる支持体7で支持し、当該支持箇所で測定用ワイヤ5の外周周囲の上下左右の4箇所に、歪みゲージを有するゲージプレートを設け、上記測定用ワイヤの挙動方向により、上記ワイヤが上記ゲージプレートを押圧して荷重をかけ、当該荷重がかかったゲージプレートの歪みゲージが示す歪み量と荷重がかかった歪みゲージの位置を検出して、各支持点の測定ワイヤの折れ角度及び方向を計測し、各支持点の距離から、上記掘進機及び複数の推進管の位置を計測する。
(もっと読む)
地中推進機の水平位置検出方法
【課題】 地中を推進してトンネルを掘削する推進機の水平位置を、推進機内部に電磁コイル等の信号発信器を搭載せずに簡易に検出可能な地中推進機の水平位置検出方法を提供する。
【解決手段】 地表5の異なる位置A,B,Cに配置した複数の振動センサ6,7,8を用いて、推進機4が地中推進時に発生する振動波の初動振動波形を異なる地表位置A,B,Cで測定し、初動振動波形の各地表位置A,B,Cにおける到達時間の差に基づいて、推進機4の水平位置を検出する。
(もっと読む)
推進機位置計測システム
【課題】 推進管がローリングしても複数のターゲットの画像を処理して推進管の位置を正確に求めること。
【解決手段】 計測装置16−(i−1)がローリングした場合、計測装置16−(i−1)よりも推進方向Xで1つ後方の計測装置16−iにおいて、計測装置16−(i−1)に配置された2つの前方用円形ターゲット34a、36aの中点の座標(X3,Y3)と計測装置16−(i−1)のローリング角φを算出し、これらの算出結果を基に、計測装置16−(i−1)においてローリングに伴う画像104、106をローリング前の画像100、102に変換し、計測装置16−(i−1)における挟角θiを正確に求めるようにしているので、計測装置16−(i−1)がローリングしても、推進管の位置を正確に求めることができる。
(もっと読む)
シールド掘進機における地中障害物探査装置と探査方法
【課題】金属製以外の障害物であっても容易にその存在を検知することができる検知構造と方法を提供する。
【解決手段】シールド掘進機のカッターフェイスやカッタースポークの内部に、探査回転体を取り付ける。この探査回転体の一部に探査ビットを取り付ける。この探査ビットは、他の掘削ビットよりも破損しやすいように形成する。探査ビットの破損の状態を検知して表示するように構成する。
(もっと読む)
孔路計測方法及び装置
【課題】従来、計測と掘削を繰り返しながら計測を行う場合、掘削の入り口が掘削過程で動くことが多く、その動き量の検出ができないため、計測誤差が増大する。従って、計測の初期方位誤差を除去し、計測精度の向上を図る。
【解決手段】掘削孔2の横位置に基準台20を設け、前記基準台20にプローブ1を設置した時の計測基準方位角Aを基準方位角として掘削孔2の計測を行う。また、前記計測基準方位角Aと前記掘削孔2の掘削基準方位角とのずれ量を予め計測しておき、前記計測時に計測した計測基準方位角Aに補正を加える。
(もっと読む)
土圧式シールドにおけるチャンバ内泥土圧の保持方法および装置
【課題】土圧式シールドの掘進停止中のチャンバ内泥土圧を設定値以上に確実に上昇させ、かつ保持することができ、しかもチャンバ内泥土の過剰流動化を防止し得るチャンバ内泥土圧保持方法を提供すること。
【解決手段】土圧式シールド1の掘進停止時に、チャンバ16内の泥土圧を監視し、チャンバ内泥土圧が設定値未満に降下したときに、チャンバ16内に泥土を押し込んだり、チャンバ16内の体積を積極的に減少させ、チャンバ16内の土圧を設定値以上に上昇させるように構成した。
(もっと読む)
孔路計測方法及び装置
【課題】本発明は、プローブの静止時間の角速度信号を平均化して得た角速度バイアス値を以降の角速度信号から差し引くことにより、角速度計固有のバイアスをキャンセルし、バイアスの大きい角速度計でも高精度の孔路計測を行うことを目的とする。
【解決手段】本発明による孔路計測方法及び装置は、計測の前後又は途中でプローブ(1)を静止させ、静止の期間の角速度信号(r)を計測し、これを平均化して角速度バイアス値(m1…)として演算部(7)に記憶し、以降の角速度信号から角速度バイアス値(m1…)を差し引き、角速度計固有のバイアスをキャンセルする方法と構成である。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置
【課題】 推進オペレータ自らがカッタヘッド案内装置のローリング量を確認し、カッタヘッド案内装置制御手段の操作もその場で行え、作業性の優れた既設埋設管破砕用カッタヘッド案内装置を提供する。
【解決手段】 カッタヘッド案内装置100にローリング量自動計測手段90を備え、且つ発進坑内3又は推進オペレータ用操作盤85にローリング量表示と、カッタヘッド案内装置100の上下方向揺動手段60及び水平方向揺動手段70の操作機能と、を配すると共に、カッタヘッド案内装置100自体に駆動用油圧ユニット付制御手段80を搭載する。
(もっと読む)
推進シールド工法におけるシールド掘進機の掘進方向制御装置
【課題】従来のようにターゲットからの反射光を利用せずに距離の計測やシールド掘進機の位置や姿勢の確認ができ、中間計測機に傾斜計等を搭載しやすい構成とし、更に中間計測機の埋設管内での移動がスムースにできるシールド掘進機の推進方向制御装置を提供する。
【解決手段】シールド掘進機1に設けられ、後方に向けて発光する面光源からなるターゲット1Bと、シールド掘進機の水平方向または埋設管の延長方向の傾斜角度を計測する傾斜計1Cと、立抗4内に設けられターゲットの発光を撮像してターゲットの変位量を確認するカメラまたは撮像装置5と、カメラまたは撮像装置によって確認されたターゲットの変位量と距離と傾斜計の角度とにもとづいてシールド掘進機の位置及び姿勢を求める演算手段26とを備え、演算手段の演算結果にもとづいてシールド掘進機の推進方向と、推進計画線との誤差を演算し、シールド掘進機の推進方向を制御するもの。
(もっと読む)
孔内型変位計
【課題】本発明は、二つの個所を結ぶ計画線に基づいて掘削カッターにより掘削貫通させるに際し、掘削孔内の縦方向及び横方向の折れを計測し、該計測値を予め確定している掘削計画線の曲率と比較して掘削カッターの推進方向を決定できるようにした孔内型変位計を提供する。
【解決手段】 本願孔内型変位計は、掘削カッター1による掘削孔2内に連結挿入される管体3の一内壁に形成されたガイド部材6に沿って連結器9を介して連結装入される装入台8と、該装入台8の連結器付近にて頭端部同士がユニバーサルジョイントされた第一及び第二変位計11、12と、該第一及び第二変位計11、12からの計測値を受領し、前記掘削カッター1の推進部に操舵信号を出力する制御手段5とを備えたことを特徴とし、第一及び第二変位計11、12で求めた曲率(変位量)と、予め確定されている計画掘削線の曲率と比較して掘削カッターの推進部をコントロールできるように構成した。
(もっと読む)
片押し自在掘削装置及び片押し自在掘削工法
【課題】 片押し自在掘削装置及び片押し自在掘削工法について、自在掘削の優位性たる曲線掘削を十分に発揮できるようにする。また自在掘削の掘削効率が高く且つ難所に遭遇しても効果的な打撃掘削を十分に発揮できるようにする。
【解決手段】 複数本の延長ロッドを連結したロッド部をアウタツール6の後端部に連結する。アウタツール6の内部には、アウタツール6とロッド部に対して挿抜可能なインナツール7が収容される。したがって、インナツール7が発進側まで到達せずロッド部が単管構造で軽装であることから、曲がりやすく片押し自在掘削による曲線掘削を十分に発揮できる。また、ロッド部が単管構造で軽量であることから、掘削効率が向上し、難所を突破する打撃力が十分に発揮される。
(もっと読む)
61 - 80 / 101
[ Back to top ]