
Fターム[2D054GA62]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 方向、方位、角度 (101)
Fターム[2D054GA62]に分類される特許
81 - 100 / 101
小口径推進工法
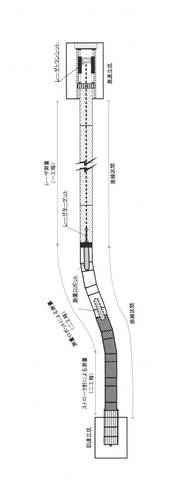
【課題】 発進からの直線区間に続いて次に曲線区間を有する線形を有する現場を、より簡便に安価な工事費で良好な施工性をもって小口径推進を実現可能とする新しい技術手段を提供する。
【解決手段】 発進立坑からの直線区間に続いて次に曲線区間を有する線形での小口径推進工法であって、到達点から曲線開始位置までの長さ分には掘進機、ポンプ筒、強制管および誘導機が配置され、曲線開始位置から発進立坑までの直線長さ分には推進管(ヒューム管)が配置されるように、直線区間でのレーザーによる測量と直線区間並びに曲線区間での測量ロボットの走行による測量とを組み合わせて測量して掘進する。
(もっと読む)
シールド掘進機

【課題】 種々の断面形状のトンネルを掘削でき、構造を簡単化でき、掘削能力が高く、強度的また耐久性の面で優れ、あらゆる土質を含む地山を掘削する場合に対応できる、シールド掘進機を提供する。
【解決手段】 掘進機本体2の前端側部分に第1軸心A1の回りに回転可能に支持された回転ドラム40、回転ドラム40に第2軸心A2の回りに回転可能に支持されたカッター支持フレーム50、カッター支持フレーム50に第3軸心A3の回りに回転可能に支持され表面に複数のカッタービット61を装備した回転型カッター60、回転ドラム40に第4軸心A4の回りに回転可能に支持された回転型補助カッター70、回転ドラム40とカッター支持フレーム50と回転型カッター60と回転型補助カッター70を夫々独立に回転駆動する第1〜第4回転駆動機構45,55,65,75を備えた。
(もっと読む)
推進機位置計測システム
【課題】 推進管がローリングしてもターゲットの画像が変位するのを防止すること。
【解決手段】 推進機10に連結される推進管12に設置されて測点Si間の挟角θiに関する情報を演算装置18に転送する計測装置16は、前方用撮像素子58と後方用撮像素子60を収納する内部筐体20と、前方用ターゲット36と後方用ターゲット38が固定されたカバー24と、カバー24に連結された外部筐体22を備え、内部筐体20はベアリング48、50を介して外部筐体22に回転自在に支持され、内部筐体20の底部には内部筐体20の重心を鉛直線上にバランスさせるためのバランスウエイト62が固定されており、推進管12のローリングに伴って外部筐体22がローリングしても、内部筐体20の重心はバランスウエイト62によって常に鉛直線上に維持される。
(もっと読む)
先導管及びこの先導管の配管工法
【課題】地中への圧入過程で障害物に当接した場合であっても、圧入することができる新規な先導管及びこの先導管の配管工法を提案する。
【解決手段】地中推進装置により地中に埋設管を設置する工程に先立ち地中に配管される先導管であって、円筒状に成形され徐々に後端に継ぎ足されて行く外管2と、円筒状に成形され上記外管2内に回動可能に挿通されてなるとともに徐々に後端に継ぎ足されて行く内管3と、この内管3の先端に着脱可能に配置されてなるとともに先端には上記外管2の先端よりも前方に位置してなる掘削ビット16が設けられた掘削ヘッド4と、を備えてなる。
(もっと読む)
掘削機の掘削地点評価装置
【課題】 推進管(一般に「円筒形のヒューム管」)の角度方向の連結部分(曲線部分)に柔軟に対応する掘削機の掘削地点評価装置を提案すること。
【解決手段】 トンネル内を掘り進む掘削機に後続状態に連結された前方側推進管と後方側推進管に目視可能な範囲内でそれぞれ水平バランス用吊り下げ手段を介して複数個の接続手段を設け、また各接続手段に先端部及び後端部がそれぞれ連結された長さが既知の複数本の棒状体を設け、接続手段に設けられかつ接続手段の回転体の回転角をそれぞれ検出する検知手段の角度信号及び棒状体の長さに関する情報に基づいて掘削機の現在位置を評定すること。
(もっと読む)
変位計の位置計測方法および位置計測装置
【課題】 小形軽量で、狭隘な設置スペ−スに設置できるとともに、計測器等の修理や部品交換に容易に応じられる、変位計の位置計測方法および装置を提供する。
【解決手段】 距離計測手段30を介し、最先の一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を基準値として計測する。 前記一対の変位計28の折れ角の初期値を演算する。 この後、前記変位計28に一対の変位計28を順次連結して延伸する。 その際前記距離計測手段30を介して、延伸した一対の変位計28の両端部と、その枢支部27の少なくとも3位置の三次元位置を計測する。 前記延伸した一対の変位計28の折れ角を算出する。 前記折れ角と、延伸した変位計28の枢支部27における三次元位置と、延伸に伴ない変化する先行の折れ角を相対量として検出する。 前記検出角度と変位計28の長さを基に、最先または所望の変位計28の位置を演算する。
(もっと読む)
管路位置測定システム
【課題】 推進工法やシールド工法等における見通しの効かない管路の施工時であっても、管路先端部の位置をリアルタイムで測定する。
【解決手段】 基点部8と管路4の先端部5との間に掛け渡され、節点9を有する線状体11と、節点9での基点部8側と先端部5側の線状体11の軸方向角度をそれぞれ検出する角度検出装置12と、基点部5での線状体11の軸方向角度を検出する角度検出装置14とを備え、各角度検出装置12,14で検出された線状体11の軸方向角度と、線状体11の長さとから、隣接する線状体11の節点9の座標を順次算出して、管路4先端部5の位置を測定するように構成した。
(もっと読む)
地盤の安定化用管体設置工法、トンネルの先受け工法及びそれに用いる掘削装置
【課題】削孔深度が深くなっても削孔速度が減速せず、削孔効率に優れた地盤の安定化用管体設置工法、トンネルの先受け工法及びそれに用いる掘削装置を提供する。
【解決手段】外管1と、内管2と、この内管1の先端側に取付けられたダウンザホールハンマー4と、このダウンザホールハンマー4の先端に取付けられ、このダウンザホールハンマー4による打撃力のみを与えて削孔を行うと、地盤が有する削孔反力との関係で削孔方向が偏心させる力を生じさせる形状の内管ビット20と、を備えた掘削装置を用いて地盤の安定化用の管体を地盤内に設置する工法であって、直線削孔の時には、前記内管ビット20に軸心回りの回転力、及び前記ダウンザホールハンマー4による打撃力を与えつつ削孔を行い、削孔に伴う孔曲りの修正時には、前記内管ビット20による打撃力のみで削孔を行い、上記の削孔を目標長まで削孔した後、前記外管1は地盤中に残置させて地盤の安定化用の管体とする。
(もっと読む)
既設埋設管破砕用カッタヘッドの案内装置および案内方法と既設埋設管の更新方法
【課題】 既設埋設管破砕用カッタヘッドを振れ回りを防止しつつ、計画線に沿わせて確実に前進させることができる案内装置を提供する。
【解決手段】 本発明の案内装置100によれば、上下方向揺動手段60および水平方向揺動手段70を用いて揺動部材40を揺動させることにより、既設埋設管1に係合している係合体30を基準として、この揺動部材40の後端に接続されているカッタヘッド7を所望の位置に案内して位置決めし、固定することができる。
(もっと読む)
変位計測装置及びこれを用いたトンネルの情報化施工方法
【課題】 不連続面を挟む両側岩盤の相対的変位を三次元的に検出し、計測コストの低廉化が図れる変位計測装置を提供する。
【解決手段】 変位計測装置1は岩盤2内に孔井3を削孔し亀裂などの不連続面4を挟む両岩盤に固定する。変位計測装置1は固定手段5によって固定設置された前部構造体6と後部構造体7を有する。前部構造体6は孔井軸に直交する壁面8に照準9を貼着する。後部構造体7の前方には撮像手段としてのカメラ10を設ける。カメラ10により取得した照準9の光学画像を二値化解析してモニター画面に二値化照準画像を表示し照準中心の座標変化と照準輪郭線の変化を評価して岩盤2の相対的変位を三次元的に検出するほか、相対的な傾斜角も評価できる。照準と撮像手段からなる一系統の計測手法によって相対的な三次元変位を検出評価するので低コストでの多種計測が実現できる。
(もっと読む)
方向制御削孔方法およびその装置
【課題】固い地盤における曲線推進能力を向上させる。
【解決手段】曲がり可能な内管5の先端に、軸心方向に対して傾斜した受圧面を有するテーパービット6を取り付け、内管5に対して軸心周りの回転力及び軸心方向に沿う推進力を作用させる回転推進手段7とを備えた削孔装置を用い、回転推進手段7により内管5に推進力を与えつつ軸心周りに揺動させて、その先端のテーパービット6の受圧面にかかる力により推進方向を変化させながら内管5を地中に曲線推進させる。
(もっと読む)
岩盤破砕装置
【課題】 トンネル内のような狭い空間内でも効率良く所望の方向に割岩することのできる岩盤破砕装置を提供すること。
【解決手段】 自走式作業車両に油圧シリンダによって上下に回動するブームを設け、該ブームの先端部に上下・左右に回動可能なブラケットを取り付け、該ブラケットに伸縮可能なスライドアームを支持して、該スライドアームの先端部に平歯車とピニオンを並列に設けた回転装置を介して割岩機をその軸回りに回転自在に取り付け、さらに前記ブームを回動させる油圧シリンダに、その作動位置を検出するセンサを設けるとともに、該センサによって検出される作動位置が予め設定した所定の範囲を越えないように油圧シリンダの作動を制御する制御装置を設けた。
(もっと読む)
水平方向掘削先端位置の測定装置
【課題】比較的小さな径を有する管などの水平系の掘削において、地中の水平方向掘削先端位置を的確に測定することができる水平方向掘削先端位置の測定装置を提供する。
【解決手段】水平方向掘削先端位置の測定装置において、ターゲットユニット10と、このターゲットユニット10にリンク支持機構を介して支持され、所定リンク長を有するリンク3と、このリンク3の後端にリンク支持機構30を介して支持されるとともに、水平保持台23を有する計測ユニット20と、前記ターゲットユニット10、前記リンク3及び前記計測ユニット20を内蔵し、掘削機1の後端に取り付けられる弾性変形可能なスリーブ管2とを備え、前記スリーブ管2は掘削中の進路変更に伴って弾性変形し、前記計測ユニット20の位置と前記リンク3の相対角度でターゲット位置を測定する。
(もっと読む)
水平方向掘削先端位置の測定システム
【課題】比較的小さな径を有する水平系の掘削において地中の水平方向掘削先端位置を的確に測定することができる水平方向掘削先端位置の測定システムを提供する。
【解決手段】水平方向掘削先端位置の測定システムにおいて、ターゲットユニット3と、このターゲットユニット3にリンク支持機構を介して支持され、所定リンク長を有するリンク4と、このリンク4の後端にリンク支持機構を介して支持される計測ユニット5よりなる測定装置と、前記ターゲットユニット3、前記リンク4及び前記計測ユニット5を内蔵し、掘削機1の後端に取り付けられる弾性変形可能なスリーブ管とを備え、切掘機1による切掘量がリンク長さとなる毎に、前記スリーブ管2中心の2点に渡したリンク3の角度を、前記計測ユニット5により、方位角、重力加速度方向を基準とする座標に変換し、前記スリーブ管の各点の位置を求める。
(もっと読む)
曲線用測量筒体
【課題】小口径管の曲線推進工事において、直線用の標準掘進機を用いて曲線推進を低コストで高精度に推進施工できる曲線用測量筒体を提供する。
【解決手段】本発明は、小口径管の直線用の標準掘進機を用いて曲線推進施工を可能にするための曲線用測量筒体において、標準掘進機の後方に非磁性体から成る第1筒体と、第1筒体の後方に掘進機外径とほぼ同径の外殻を有する鋼材から成る第2筒体とを接続した曲線用測量筒体を、各筒体の前後の接続部は屈曲可能に嵌合し、第1筒体内に電磁誘導発信器とジャイロセンサユニットを搭載し、第2筒体内にジャイロセンサユニットを稼動されるためのジャイロセンサユニット等を搭載した曲線用測量筒体である。
(もっと読む)
地中位置計測方法及びシステム
【課題】複数の地中位置において同時に対地三次元座標を計測できる地中位置計測方法及びシステムを提供する。
【解決手段】地上又は地中の既知三次元座標の複数の基準位置Rから、自己相関が強く相互相関が弱い識別符号列Pで変調された周期性基準信号frを、所定搬送周波数fcの回転磁界3に乗せて地中2へ発信する。地中2の計測位置Qに三以上の受信コイル素子群21が所定相互関係で取り付けられた磁界計測装置20を所定姿勢Sで配置し、回転磁界3により各コイル素子21に誘起される信号fqを計測する。各コイル素子21の計測信号fqと各識別符号列Pとの相関に基づき計測位置Qにおける各基準信号frの位相τを検知し、各基準信号frの位相τのコイル素子相互間位相差Δτとコイル素子群21の所定相互関係及び姿勢Sとから、各基準位置Rの向きθRを検出する。各基準位置Rの既知三次元座標と向きθRとから、計測位置Qの対地三次元座標を算出する。
(もっと読む)
測量器械設置用台
【課題】
地中に推進管を埋設する推進工法において、掘進機の位置や推進管の埋設状況をリアルタイムできわめて迅速に計測することができる測量器械設置用台を提供する。
【解決手段】
測量器械Bが搭載された台本体2とその両側端部に垂直に立設された吊りアーム3,3と当該吊りアーム3,3の上端部にそれぞれ水平に突設された回転軸4,4とを備えて構成する。台本体2には重り5、重り調整機構6および気泡管7をそれぞれ取り付け、回転軸4,4にはベアリング8、ロータリーダンパー9および電磁ブレーキ10をそれぞれ取り付ける。台本体2は測量器械Bを脱着自在に固定できるように構成する。吊りアーム3は縦長の逆V字形をなす枠状に形成し、回転軸4は各吊りアーム3の上端部に鋼管Aの推進方向と直交する方向に水平に突設する。
(もっと読む)
トンネル掘削機及びトンネル掘削機のローリング抑制方法
【課題】 ローリング修正のための掘進をほとんどせずとも容易にローリングを解消又は防止できるトンネル掘削機及びトンネル掘削機のローリング抑制方法を提供する。
【解決手段】 地山側に臨んだ先端部にカッタ部3を有する前胴5と、前胴5に屈曲自在又は伸縮自在に係合乃至連結される後胴6とを備えたトンネル掘削機1において、前胴5と後胴6とを軸回りに揺動乃至回動自在に係合乃至連結すると共に、前胴5と後胴6との間に前胴5の軸回りへの回動に対して後胴6より反力を与えて前胴5のローリングを規制乃至抑制する姿勢制御手段7を設けたものである。
(もっと読む)
削孔装置の削孔位置管理方法
【課題】
絶対方位によらず基準方位に対する方位角度差のみで座標を算出して画一的に管理することができ、より高精度に削孔装置の位置を管理することができる削孔装置の削孔位置管理方法の提供
【解決手段】
削孔装置に連結され、チューンドドライジャイロ、加速度計及び回転角検知手段からの出力に基づいて傾斜角及び方位角を算出する算出手段とを有する方位傾斜角検知装置を使用し、傾斜角及び方位角と移動距離とに基づいて削孔装置の位置座標を算出する方法において、方位傾斜角検知装置を予め設定した現場座標系Y軸の軸方向に向けて配置し、その状態で方位傾斜角検知装置により現場座標系Y軸の方位を算出し、算出された現場座標系Y軸の方位を基準方位とし、その後、方位傾斜角検知装置を削孔装置に組み込んで削孔作業を行い、所定距離を削孔する毎に各測定位置における測定方位と基準方位との方位角度差を検出し、方位角度差に基づいて位置座標算出を行う。
(もっと読む)
シールド掘進機の位置計測方法
【課題】地上からの探り孔や到達位置付近からの水平ボーリングによる位置確認孔の施工を必要とせず、リアルタイムでシールド掘進機3の位置を確認することのできる方法を提供する。
【解決手段】所定の掘進到達予定位置から地盤1中へ、シールド掘進機3による掘進予定位置の周囲へ向けて、導波棒5を、掘進計画基線Oと直交する平面における前記掘進計画基線Oとの交点を原点とするxy座標系の各象限を通るように複数挿入し、シールド掘進機3から各導波棒5に伝達された振動を、各導波棒5に取り付けた加速度センサ6によって検出し、検出値の大きさやその比較によってシールド掘進機3の位置を求める。
(もっと読む)
81 - 100 / 101
[ Back to top ]