
Fターム[2D054GA64]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 力、歪、トルク (15)
Fターム[2D054GA64]に分類される特許
1 - 15 / 15
地盤探査装置と探査方法。
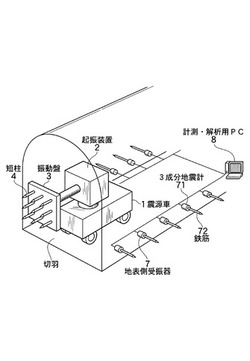
【課題】短時間で地盤内の状況を探査できる装置と方法を提供する。
【解決手段】震源車と、震源車に搭載した、周波数を連続的に変化させた振動を発振する起振装置と、その振動を切羽に伝える短柱と、震源車に搭載した搭載受振器と、トンネルの壁面に設置する地表側受振器と、受振信号収録装置と、信号処理・解析処理装置(PC)から構成する。前記の起振装置では、X―Y―Z方向に向けた3次元的な振動を発振できるように構成する。
(もっと読む)
シールド機

【課題】テールプレートのひずみ及びテールエンドクリアランスを測定可能なシールド機及びクリアランス測定方法を提供する。
【解決手段】油圧ジャッキ17の押圧部13にはクリアランス計15が設置される。クリアランス計15は、スキンプレート3内周面とセグメント9の外周面の隙間であるテールクリアランス25を測定する。テールプレート11にはひずみ計21とストローク計23が設置される。ひずみ計21は、テールプレート11のひずみを測定するためのものであり、テールプレート11のスキンプレート3側と、テールプレート11後端部に2箇所設置される。ストローク計23は、テールプレート11後端の内周面とセグメント9外周面の隙間であるテールエンドクリアランス27を測定する為のもので、テールプレート11の後端部内面に設置される。
(もっと読む)
探査システム、シールド機及びシールド機の掘進工法
【課題】切羽近傍の複数箇所の地山情報を取得し、それら複数の地山情報に基づいて地山の安定度を判定可能な探査システム及びこの探査システムを備えたシールド機並びにこのシールド機を用いた掘進工法を提供する。
【解決手段】シールド機1は、切羽7の安定度を探査するための探査システム8を備えている。探査システム8は、シールド機1の上部に設置された上部探査装置9と、シールド機1の内部に設置された前方探査装置10と、カッターヘッド2に設置された切削抵抗検出装置と、上部探査装置9、前方探査装置10及び切削抵抗検出装置により測定された測定結果に基づいて地山Eの安定度を判定するための判定装置12と、各装置の測定結果や判定結果を表示するための表示装置13と、を備えている。
(もっと読む)
函体施工方法
【課題】既設の構造物への影響を抑えながら既設の構造物の上方に函体を設置できる函体施工方法を提供する。
【解決手段】地下構造物3が埋設された地山Mに新たな函体1を順次繋ぎ合わせながら推進させるための函体施工方法において、函体1を設置するために既設の地下構造物3の周囲の地山を掘削し、その掘削に伴って生じる地下構造物3の変位に基づいて、地下構造物3の上方の地山Mを掘削した際の地下構造物3への影響を評価する評価値(浮き上がり量L)を求め、評価値が第1の閾値以上の場合には、少なくとも地下構造物3の上方を函体1で横切る際に、掘削によって撤去される土砂と函体1の自重とをバランスさせるためのウエイト9を地下構造物3の上方に設置した状態で函体1を推進させ、評価値が第1の閾値未満の場合には、少なくとも地下構造物3の上方を函体1で横切る際に、ウエイト9を設置することなく函体1を推進させる。
(もっと読む)
シールド掘進機の掘削断面土層判定装置および判定方法
【課題】 シールド掘進機の前方における土層を精度よく検出することができ、もって効率的な掘削管理に寄与することができるシールド掘進機の掘削断面土層判定装置および判定方法を提供する。
【解決手段】 シールド掘進機1の切羽側には複数のカッタビット30が設けられており、カッタヘッド2の回転中心となる中心軸から異なる距離をおいて配置された複数のカッタビット30に歪ゲージ41が取り付けられている。歪ゲージ41では、カッタヘッド2を回転させて掘進を行う際のカッタビット30の歪値を検出する。掘進管理装置47では、歪ゲージ41で検出される各カッタビット30の歪値と、カッタビット30の位置に基づいて、シールド掘進機1の切羽側における土層を判定する。
(もっと読む)
シールド掘進機
【課題】切羽に対する掘削断面が上下及び/又は左右で非対称の異形掘削断面で、シールドジャッキの配設間隔をその異形掘削断面の周縁に沿って等間隔としても、切羽における上記異形掘削断面の一部分に生じる推力不足の問題を回避できるシールド掘進機を提供することにある。
【解決手段】シールド掘進機1の掘進機本体3に、既設のセグメント6に反力を取って掘進機本体3を前進させるためのシールドジャッキ7を、異形掘削断面の周縁に沿って等間隔を隔てて複数配設し、異形掘削断面を、異形掘削断面の図心Gを通って掘進機本体3の前進方向と直交する方向に延出された仮想ラインXで、広面積部Bと狭面積部Aとに仮想的に二分割し、シールドジャッキ7の内の広面積部Bに配置された広面積部シールドジャッキ7bが、シールドジャッキ7の内の狭面積部Aに配置された狭面積部シールドジャッキ7aよりも、ジャッキ推力が大きいものを含む。
(もっと読む)
シールド機及びチャンバ内閉塞管理方法
【課題】シールド機のチャンバ内の土砂の流動性を監視し、チャンバ内の土砂の閉塞場所を早期に発見でき、チャンバ内の土砂閉塞を未然に防ぐシールド機、チャンバ内閉塞管理方法を提供する。
【解決手段】シールド機1において、カッタ部7により掘削された土砂は、カッタスポーク11の隙間から、チャンバ8内へ流入し、隔壁5の下方に設けられた穴部から、スクリューコンベア22により排出される。カッタスポーク11のチャンバ8側には、流動性計測器17が設置され、チャンバ8内の土砂の流動性を計測する。隔壁5には、複数の土圧計19と温度計21が設置され、土圧計19は、チャンバ8内の土砂の土圧の変化を測定する。温度計21は、チャンバ8内の土砂の温度を測定する。
(もっと読む)
チャンバ内土砂流動の測定装置
【課題】掘削地盤の性状の急変に対応することを可能にすること。
【解決手段】掘進機12には、チャンバ20内における混合物の流動方向とその大きさを把握する測定装置10aが設置されている。装置10aは、チャンバを隔成する隔壁を貫通して、チャンバ20内に出没可能に設置される計測ロッド50を備え、計測ロッド50の変形量から、混合物の流動方向とその大きさとを推定する。一方、予めチャンバ20の機械モデルを設定し、混合物の粘土式に基づいて、チャンバ20内の流速の大きさ,方向,分布の可視化された複数の流動解析結果を求めておく。そして、測定装置10aにより得られた推定値と流動解析結果との相関関係の良好なものを選択して、選択された流動解析結果を推定値が得られた時点の流動状態とする。
(もっと読む)
土圧式シールド工法の推進管理方法
【課題】トンネル掘進中のチャンバー内における掘削土砂の塑性流動状態をリアルタイムで把握し、管理することができる土圧式シールド工法の推進管理方法を提供する。
【解決手段】測定装置25にて算出した回転トルクの時系列の算出値と流動解析で推定した回転トルクの時系列の推定値とを比較し、流動解析にて推定した回転トルクの精度を検証する。この精度が高い場合は、流速及びずり速度を可視化する。この流速とずり速度との関係が適切の場合は掘削土砂の流動方向及び流速を算出する。そして、チャンバー19内の掘削土砂の流動方向及び流速をモニタ等に表示することにより、掘削土砂の流動状態をリアルタイムで確認する。
(もっと読む)
シールド掘進機における地中障害物探査装置と探査方法
【課題】金属製以外の障害物であっても容易にその存在を検知することができる検知構造と方法を提供する。
【解決手段】シールド掘進機のカッターフェイスやカッタースポークの内部に、探査回転体を取り付ける。この探査回転体の一部に探査ビットを取り付ける。この探査ビットは、他の掘削ビットよりも破損しやすいように形成する。探査ビットの破損の状態を検知して表示するように構成する。
(もっと読む)
管路位置測定システム
【課題】 推進工法やシールド工法等における見通しの効かない管路の施工時であっても、管路先端部の位置をリアルタイムで測定する。
【解決手段】 基点部8と管路4の先端部5との間に掛け渡され、節点9を有する線状体11と、節点9での基点部8側と先端部5側の線状体11の軸方向角度をそれぞれ検出する角度検出装置12と、基点部5での線状体11の軸方向角度を検出する角度検出装置14とを備え、各角度検出装置12,14で検出された線状体11の軸方向角度と、線状体11の長さとから、隣接する線状体11の節点9の座標を順次算出して、管路4先端部5の位置を測定するように構成した。
(もっと読む)
掘進機および計測装置
【課題】 チャンバ内の土砂の性状を、リアルタイムでより合理的に把握できる掘進機および計測装置を提供すること。
【解決手段】 計測装置20を、カッタ3の板状部材17に連結され、チャンバ9内に突出した棒状材19、棒状材19に設置された歪みゲージ21、コンピュータ(図示せず)等で構成する。棒状材19は、一端が板状部材17に固定されるか、ピン接合される。掘進機1がカッタ3を回転させて地山を掘削すると、カッタ3の板状部材17に連結された計測装置20は、掘削土砂が充満したチャンバ9内を回転移動する。計測装置20の歪みゲージ21は、チャンバ9内の掘削土砂から受ける力による棒状材19のたわみ(変位もしくは変形)を計測する。計測装置20では、コンピュータ(図示せず)等に歪みゲージ21が計測した計測値を送り、計測値に基づいてチャンバ9内の掘削土砂の性状を把握する。
(もっと読む)
地山の地質構成予測方法
【課題】特殊な物理探査計測機器を必要とすることなく、また掘削作業と併行しながら、日常的な施工管理の一環として、簡単かつ高精度で地山の地質構成を正確に把握する。
【解決手段】地山の明かり掘削部の周辺領域に任意数の観測点を設定し、発破掘削の前後において前記観測点の変位を測定した結果から変位計測データを取得し、掘削進行状況を反映した3次元解析モデルにおいて、予め地質分布に基づきブロック割りを行い、各ブロック領域内において地盤定数は一定値であるとする条件の下で、前記変位計測データを与条件として逆解析を行うことにより、ブロック領域毎に地山の地盤定数を同定する。
(もっと読む)
シールド掘削機における掘削土処理装置
【課題】 掘削すべき地盤が岩盤、固形粘土等の自立性を有する地盤であっても崩壊性を有する砂地盤等であってもそれぞれの地盤に対応した方法で掘削して掘削土を還流泥水により排出し、泥水から分離させて効率良く排除することができる掘削土処理方法を提供する。
【解決手段】 礫や砂地盤を掘削する場合には、作泥材槽からベントナイト溶液を主体とする泥水からなる作泥材をシールド掘削機のチャンバー内に供給、充満させて、切羽の崩壊を防止しながら掘削し、掘削土をスクリューコンベアで混合還流槽に排出して該混合還流槽と貯水槽間に設けた泥水還流管路を循環する水に近い泥水によって搬出してその途上で掘削土を分離、排除する。この際、粒径の大きい固形分を分離したあとの水分の多い泥水の一部を作泥材の一部として使用する。また、岩盤や固形粘土層の地盤を掘削する場合には、作泥材に代えて貯水槽内の水に近い泥水を使用してチャンバーに供給する。
(もっと読む)
シールド掘進機・カッタ駆動軸のスラスト荷重検出装置とその荷重検出方法
【課題】 掘進作業過程における前面荷重、即ちカッタ駆動軸に作用するスラスト荷重を精度よく検出することにより、作業中における前面荷重の正確な値を把握する。
【解決手段】 掘進作業過程におけるカッタ駆動軸3に作用するスラスト荷重を検出するシールド掘進機・カッタ駆動軸のスラスト荷重検出装置であって、カッタ駆動軸3の内部に設けた、スラスト荷重を検出する荷重せンサ6を具備する駆動軸変位/ひずみ変換・増幅ロッド5と、シールド掘進機操作盤に設けた、実測荷重値を明示するために、ひずみ測定器を内蔵した荷重監視・記録装置12と、を備えたものである。
(もっと読む)
1 - 15 / 15
[ Back to top ]