
Fターム[2D054GA72]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出物理量 (334) | 回転数・度数・回数 (9)
Fターム[2D054GA72]に分類される特許
1 - 9 / 9
推進工法における掘削ヘッド回転速度検出装置
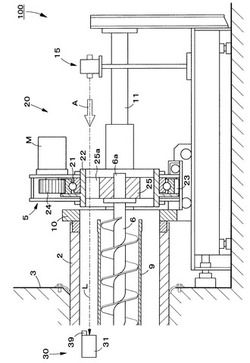
【課題】推進工法に用いる推進機を改造することなく掘削ヘッドの回転速度を検出できるようにする。
【解決手段】発進坑内に設置されたレーザーセオドライトからターゲットに向けてレーザー光線を照射するとともに、このレーザー光線を遮る状態と通過させる状態とを作り出す遮光部材がスクリュコンベアと一体に回転するように設ける。ターゲットは、レーザー光線を受光している状態と受光していない状態を識別するとともに、所定の時間内における受光状態の変化に基づいてスクリュコンベアの回転速度、したがってその先端に設けられている掘削ヘッドの回転数を演算し、その前面に設けられている表示器に表示する。この表示器をレーザーセオドライトで視認することにより、掘削ヘッドの回転数を容易に確認することができる。
(もっと読む)
探査システム、シールド機及びシールド機の掘進工法

【課題】切羽近傍の複数箇所の地山情報を取得し、それら複数の地山情報に基づいて地山の安定度を判定可能な探査システム及びこの探査システムを備えたシールド機並びにこのシールド機を用いた掘進工法を提供する。
【解決手段】シールド機1は、切羽7の安定度を探査するための探査システム8を備えている。探査システム8は、シールド機1の上部に設置された上部探査装置9と、シールド機1の内部に設置された前方探査装置10と、カッターヘッド2に設置された切削抵抗検出装置と、上部探査装置9、前方探査装置10及び切削抵抗検出装置により測定された測定結果に基づいて地山Eの安定度を判定するための判定装置12と、各装置の測定結果や判定結果を表示するための表示装置13と、を備えている。
(もっと読む)
シールド機およびシールド機の制御方法
【課題】 単一のカッタによって、前方の地山を任意の形状に掘削可能であり、シールド機の姿勢や進行方向などの制御を容易に行うことができるシールド機およびシールド機の制御方法を提供する。
【解決手段】 隔壁5には、回転体21が設けられる。回転体21の前面には、フレーム25が設けられる。回転体21にはフレーム25を回転させるためのフレームモータ27が設けられる。フレーム25の一方の端部は、フレーム回転軸35を中心に回転可能なように回転体21に接合され、フレーム25は、回転体21に対して異なる回転軸で回転動作が可能である。フレーム25の回転体21との接合部とは反対側の端部近傍に、複数の刃を有するカッタ29が設けられる。フレーム25にはカッタモータ31が設けられ、カッタ29は、カッタ回転軸37を中心に回転可能である。なお、カッタ回転軸37はフレーム回転軸37および回転体回転軸33に対し偏心している。
(もっと読む)
トンネル掘削効率を監視するための装置および方法
複数のカッタアセンブリ(10)を回転可能に支持する回転カッタヘッド(93)を有する、トンネル掘削機(90)。複数の計器パッケージ(50)は、回転カッタヘッドに取り付けられ、各計器パッケージは、関連付けられたカッタアセンブリと接触する遠位端を有する。計器パッケージは、関連付けられたカッタアセンブリを監視するために、加速度計(32)と、磁力計(33)と、温度センサ(34)とを含む、複数のセンサを含む。センサは、計器パッケージの遠位端に装着され、カッタアセンブリと接触したままとなるように偏向される。計器パッケージは、無線送信機を含み、メッシュまたはピアツーピアネットワーク内で相互接続される。バッテリパック等の電力供給装置(176)は、各計器パッケージに対して提供される。センサからのデータを使用して、トンネル掘削機の動作の制御および/またはカッタアセンブリの状態の監視を行なってもよい。 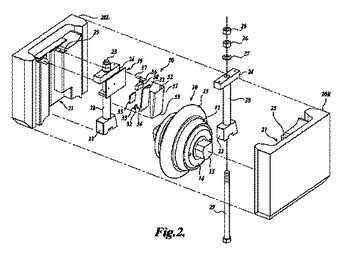 (もっと読む)
(もっと読む)
掘削機および切羽の前方探査方法
【課題】地盤を破壊することなく、周囲への影響の少ない方法で、S波を発生させる、トンネル切羽の前方探査方法を提供する。
【解決手段】シールドマシン1は、カッターフェース7とスキンプレート9とからなり、カッターフェース7には、発振部3と受振部5とを交互に配置する。発振部3と受振部5は、シールドマシン1からトンネル前方切羽に突出している。発振部3は、管22と、管22内に圧着した発振器13により構成され、超磁歪素子27を有する発振器13が振動することで、発振部3にて非破壊でS波を発生可能である。
(もっと読む)
角穴掘削マシン
【課題】バケットやブームが掘進ケーシング内の各部に当たらないように駆動される角穴掘削マシンを提供する。
【解決手段】バケット12を上下方向に回動させるブーム55と、このブーム55を掘進ケーシング30に対して前後方向に移動するスライドフレーム70とを備え、バケット掘削機10が切羽を掘削するとともに掘削された礫や土砂を集める角穴掘削マシン1であって、スライドフレーム70の前後位置を検出する前後位置検出器と、ブーム55の上下方向の回動位置を検出するブーム回動位置検出器と、スライドフレーム70の前後位置検出値とブーム55の回動位置検出値とに応じてバケット掘削機10が掘進ケーシング30内の各部に当たらないようにブーム55の上下方向の回動範囲を規制するブーム回動範囲規制手段とを備える。
(もっと読む)
矩形掘進機
【課題】 従来のように掘削後に掘進機内や後方函体でローリングの修正を行うのではなく、掘削段階でローリングの修正を行えるようにした矩形掘進機を提供する。
【解決手段】 複数のカッター12を軸支して自転公転させる円形の駆動部13を外殻11から分離してカッター12の公転位置で軸支し、外殻11の内部左右位置に内側へ伸縮できるローリング修正ラムジャッキ16を設け、左右のローリング修正ラムジャッキ16の伸縮ロッド16aを駆動部13の突起13gに当接し、左右のローリング修正ラムジャッキ16を相対的に伸縮させることで駆動部13が外殻11に対して円周方向へ回動できるようにした。
(もっと読む)
土圧式シールド工法の推進管理方法
【課題】トンネル掘進中のチャンバー内における掘削土砂の塑性流動状態をリアルタイムで把握し、管理することができる土圧式シールド工法の推進管理方法を提供する。
【解決手段】測定装置25にて算出した回転トルクの時系列の算出値と流動解析で推定した回転トルクの時系列の推定値とを比較し、流動解析にて推定した回転トルクの精度を検証する。この精度が高い場合は、流速及びずり速度を可視化する。この流速とずり速度との関係が適切の場合は掘削土砂の流動方向及び流速を算出する。そして、チャンバー19内の掘削土砂の流動方向及び流速をモニタ等に表示することにより、掘削土砂の流動状態をリアルタイムで確認する。
(もっと読む)
シールド掘進機
【課題】 種々の断面形状のトンネルを掘削でき、構造を簡単化でき、掘削能力が高く、強度的また耐久性の面で優れ、あらゆる土質を含む地山を掘削する場合に対応できる、シールド掘進機を提供する。
【解決手段】 掘進機本体2の前端側部分に第1軸心A1の回りに回転可能に支持された回転ドラム40、回転ドラム40に第2軸心A2の回りに回転可能に支持されたカッター支持フレーム50、カッター支持フレーム50に第3軸心A3の回りに回転可能に支持され表面に複数のカッタービット61を装備した回転型カッター60、回転ドラム40に第4軸心A4の回りに回転可能に支持された回転型補助カッター70、回転ドラム40とカッター支持フレーム50と回転型カッター60と回転型補助カッター70を夫々独立に回転駆動する第1〜第4回転駆動機構45,55,65,75を備えた。
(もっと読む)
1 - 9 / 9
[ Back to top ]