
Fターム[2D054GA82]の内容
立坑・トンネルの掘削技術 (8,857) | 制御・検知・計測・探知 (1,264) | 検出手段 (180) | 光・レーザ光によるもの (65)
Fターム[2D054GA82]に分類される特許
1 - 20 / 65
トンネル施工情報投影システム
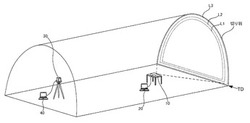
【課題】トンネル施工時、切り羽面に表示する情報量を増大させることができ、トンネル施工の支援に大きく資することが可能なトンネル施工情報投影システムを提供する。
【解決手段】本発明のトンネル施工情報投影システムは、トンネル施工時、切り羽面に対し施工に関連する情報を投影することで、トンネル施工の支援を行うトンネル施工情報投影システムにおいて、前記切り羽面に投影するデータを記憶するパーソナルコンピューター20と、前記パーソナルコンピューター20と接続され、前記パーソナルコンピューター20からの入力に基づいて前記切り羽面に投影を行うプロジェクター10と、規定の基準点を前記切り羽面に照射するトータルステーション30と、からなり、前記パーソナルコンピューター20は、前記トータルステーション30によって照射された前記切り羽面上の前記基準点に基づいて前記データを補正し、投影用の補正データを生成し、前記補正データを前記プロジェクター10に入力することを特徴とする。
(もっと読む)
地山状況予測方法

【課題】日常の施工管理として、簡易に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能な地山状況予測方法およびトンネル掘削方法を提案する。
【解決手段】第一の計測断面に切羽側計測点を設定するとともに、切羽側計測点から坑口側に距離aだけ離れた坑口側計測点を設定する作業と、切羽側計測点と坑口側計測点との位置関係である初期値を計測する作業と、切羽Kが計測断面から距離bだけ離れた位置に到達した段階で、切羽側計測点と坑口側計測点との位置関係である計測値を計測する作業と、初期値と計測値との差である相対変位を算出する作業とを行う第一工程と、切羽Kが第二の計測断面を通過後、第一工程と同様に相対変位を算出する第二工程とを備え、第一工程で算出した相対変位と第二工程で算出した相対変位との比較に基づいて、切羽Kより前方の地山状況を予測する。
(もっと読む)
管設置装置及び管設置方法
【課題】計画した所望の地中位置に管を設置できる管設置装置及び管設置方法を提供する。
【解決手段】断面矩形状の管(先頭管6)を、地中10に形成された空洞部から地中に設置する場合に、先に地中に入れる管の先頭開口側の内側に、管の推進方向と交差する回転中心線Lを回転中心として回転する回転掘削体46を有した掘削機械26を設置し、管を押圧するとともに掘削機械で地中を掘削することにより、管を推進させて地中に設置する管設置装置において、管の位置を検出する位置検出手段95と、位置検出手段により得られた情報によって回転掘削体の回転方向を切換えるための回転切換手段90とを備えた。
(もっと読む)
推進力上昇位置の検出方法
【課題】長距離・曲線推進施工において、推進管列の推進力の上昇位置を的確に判断し、安全で確実に長距離・曲線推進施工が行える推進力上昇位置の検出方法を提供する。
【解決手段】推進工法で移動する管体内の見通し可能な範囲をつなぐ位置に配置した複数の自動追尾する光波測距儀で、互いの位置を自動計測してそのデ−タを演算することで先導体位置の座標を算定する自動測量システムを用いた推進力上昇位置の検出方法であって、管内に複数の前記光波測距儀を所定の間隔で配置した自動測量システムを用い、元押ジャッキ力を管列2の後端に作用させる前の各光波測距儀の位置座標と、元押ジャッキ力を管列後端に作用させて先端先導体1が移動したときの各光波測距儀の位置座標との各移動距離を算出し、その移動距離の大小差によって推進力の上昇位置を判断する推進力上昇位置の検出方法である。
(もっと読む)
小口径管曲線推進装置及び小口径管曲線推進工法
【課題】掘進機後退時の引抜き鋼棒による管内設備やカメラの破損を防止する。
【解決手段】カメラ2a,2b(光学式カメラ測量センサー)とターゲット2cを設置したカメラユニット2と、カメラユニット2を走行させるレール体3とを備えた撮像ユニット4を連結し、ターゲット2cをカメラ2a,2bで撮像することにより掘進機Kの位置と方向を計測し、この計測結果に基づいて小口径管5の曲線推進行い、外周面に雄ねじ6を有する引抜き鋼棒7と、雄ねじ6と遊嵌する雌ねじ8を内周面に有し引抜き鋼棒7を遊嵌状態で連結させるカプラ9と、を備え、引抜き鋼棒7をカプラ9で遊嵌することにより発進立坑Hから掘進機Kまで引抜き鋼棒7を曲線状に配置し、引抜き鋼棒7の位置を上部から下部に変換する位置変換アタッチメント10を掘進機Kと撮像ユニット4の間に介装する。
(もっと読む)
テールクリアランス測定装置
【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部32と、コンピュータ34とを含んで構成されている。カメラ部32は、テール部14の内周面1402および該内周面1402に対向するセグメント20の外周面2002を撮影して画像データを生成するものである。カメラ部32は、テール部14の内周面1402およびセグメント20の外周面2002の周方向に90度の間隔をおいた4個所を撮影するように4個設けられている。コンピュータ34は、ケーブルを介してカメラ部32から供給される画像データに基づいてテール部14のスキンプレート14Aの内周面1402とセグメント20の外壁面2002とのテールクリアランスを導出する。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネルと地山掘削機との位置関係にかかわらず、かつ、既設トンネルに発信器を取り付けることなく、既設トンネルとの距離を測定可能な地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
地山掘削機の位置検出システム及びそのシステムを備えた地山掘削機
【課題】既設トンネル内に設定された基準線に対する地山掘削機の中心軸のずれ量を測定して、地山掘削機の位置を検出可能な位置検出システム及びそのシステムを備えた地山掘削機を提供する。
【解決手段】位置検出システム2は、地山掘削機1の外殻1aに取り付けられて、既設トンネル3までの距離を測定可能な距離センサー10〜13と、既設トンネル3の内周面に取り付けられて、既設トンネル3の外殻3a及び地山を透過可能な信号を発信する発信器20〜27と、地山掘削機1の外殻1aに取り付けられて、発信器20〜27から発信された信号を受信可能な受信器30〜33と、を備えている。
(もっと読む)
方向制御削孔方法及び装置
【課題】計測誤差・削孔誤差が生じる可能性が小さく、しかも方向を制御しながら削孔するに好適な方向制御削孔方法とする。
【解決手段】削孔管5を有し、削孔管先端部50Fに角速度検出手段AD及び傾斜角検出手段BDを設けてなる削孔装置を用いて、削孔管5を推進させつつ、角速度検出手段ADにより角速度を検出し、積分することにより方位角変化量を求め、他方で、傾斜角検出手段BDにより削孔区間の先端における傾斜角を検出し、方位角変化量と傾斜角とを用いて、削孔区間の基端に対する先端の相対位置を求め、この作業を所定回繰り返して削孔管5を地中に段階的に進行させた段階で、削孔管5内に挿入式計測装置40を挿入し、削孔管先端部50Fまで移動させて孔先端部の現在位置を計測し、この計測値に基づいて相対位置を合算して得た孔先端部の現在位置を補正し、この補正値を基準として更に削孔管5を地中に段階的に進行させる。
(もっと読む)
固定式計測装置及び方向制御削孔装置
【課題】作業時間が長くなるのを抑えることができ、しかも方向を制御しながら削孔するに好適な固定式計測装置を提供する。
【解決手段】削孔管先端部50Fに角速度検出手段AD、傾斜角検出手段BD及びこれらのケース体を設けた削孔装置と、孔先端部の現在位置を計測する挿入式計測装置40と、削孔管5を引き戻した後、削孔区間の基端から先端まで推進させつつ、角速度検出手段ADにより角速度を検出し、積分して方位角変化量を求め、他方で、傾斜角検出手段BDにより削孔区間の先端における傾斜角を検出し、これらの値を用いて削孔区間の基端に対する先端の相対位置を求める機構と、これらの作業を所定回繰り返した段階で、削孔管5内に挿入式計測装置40を挿入し、削孔管先端部50Fまで移動させて孔先端部の現在位置を計測し、この計測値に基づいて孔先端部の現在位置を補正する機構とを備える。
(もっと読む)
自動測量方法
【課題】掘進機の位置及び向きの自動測量に関し、掘進機の位置及び向きを、測量することができる自動測量方法を提供する。
【解決手段】下記の手順により掘進機の位置及び向きを自動測量する。(1)自動追尾式測距測角儀の前回測量時の位置データ及びそれ以降の移動データから、自動追尾式測距測角儀の今回測量時の位置及び向きを予測し、坑口側に設置した複数の基準点の視準角を予測する工程。(2)(1)の予測結果をもとに、自動追尾式測距測角儀から、坑口側の複数の基準点を視準して自動追尾式測距測角儀の位置を検出する工程。(3)掘進機の測量位置データから、掘進機に設置した複数のターゲットの位置及び視準角を予測する工程。(4)(3)の予測結果をもとに、自動追尾式測距測角儀から掘進機に設置した複数のターゲットの位置を検出する工程。(5)掘進機の複数のターゲットの位置の検出結果をもとに、掘進機の位置と向きを求める工程。
(もっと読む)
削孔工法
【課題】可撓性ロッドを具備する自在ボーリングマシンを用いて削孔を行った後に、掘削されたボーリング孔の崩壊或いは崩落を防止して、その後の作業に必要な機器を確実に予定箇所へ到達させることが可能な削孔工法の提供。
【解決手段】削孔手段(16)から削孔流体を噴射して地盤を削孔し、閉鎖部材(3)を押圧し前記固定手段(20)を剪断破壊して閉鎖部材(3、3A)を前記ロッド(10)外側の領域(地中の領域101)に押し出し、削孔後の作業に必要な機器(7、7B、8)を前記ロッド(10)内側の中空部分(13)内へ挿入して当該ロッド(10)の先端まで移動する。
(もっと読む)
推進管情報管理システム
【課題】推進工法に適用されてそのまま管路となる推進管の履歴を施工時以降も管理可能として、当該推進管の高度な品質管理と供用後の維持管理性を向上することが可能な推進管情報管理システムを提供する。
【解決手段】推進工法に用いられて坑内で位置が遷移する推進管4個々に、それらに個別の情報を記録したIDシール8を貼り付け、製造後から施工前までの適宜時点で、推進管それぞれのIDシールの情報を管理室のコンピュータのデータベースソフトに蓄積して、推進管の管理用データベースを作成するようにした推進管情報管理システムであって、少なくとも推進管の内周面4bに貼り付けられるIDシールと、管理用データベースに推進管個々の施工時以降における情報を追加するために、推進管内周面のIDシールをカメラ機能で読み取ってコンピュータに送信する携帯電話10とを備えた。
(もっと読む)
路面変状管理システム
【課題】人為操作によるオートレベルで測量する場合に、携帯電話を入力端末とし、計測者が携帯電話を操作して入力処理を完了できて便利であり、システム構成としても経済的で簡易なものとし得、携帯電話からのデータ送出によりリアルタイム処理に適合し得る路面変状管理システムを提供する。
【解決手段】計測者が携帯し、計測範囲データから路面9の測点リスト(xxx1等)の一覧表を生成すると共に、測点リストの各測点における測量値の入力を受け付けて計測結果データを生成する測量用アプリケーションを搭載した携帯電話8を備え、ホストパソコン6と携帯電話8とを無線通信で接続し、ホストパソコンは計測範囲データを携帯電話に送出し、携帯電話の測量用アプリケーションは、携帯電話の画面に測点リストの一覧表を表示し、一覧表への測量値の入力を受け付け、入力完了指示を受け付けることで、計測結果データをホストパソコンへ送出する。
(もっと読む)
掘進機
【課題】地中に推進管を埋設するために用いられる掘進機および方向修正装置の耐久性を向上する。
【解決手段】カッターヘッドを備えた先頭体と、本体と、先頭体を支持する方向修正装置とを備えており、方向修正装置は、掘進機の本体の先端付近に備えられるジャッキシリンダと、掘進機の先頭体の後端付近に備えられるジョイントとを有しており、ジャッキシリンダは、本体の内側面に設置された支持台に設けられた貫通孔と、ジャッキシリンダの貫通孔とに軸を挿通することで、少なくとも上下方向に回転駆動可能であり、その前端部には、先端付近が球体または略球体状に成形されたシリンダロッドを備えており、ジョイントは、その内面が、シリンダロッドの球体または略球体と同一またはほぼ同一の大きさの球面または略球面に成形されており、ジョイントの内面とシリンダロッドの球体または略球体とが嵌合することにより、掘進機の先頭体を首振り自在に支持する。
(もっと読む)
掘削機
【課題】掘削の中断を回避して効率よく掘削を行うことができるトンネル掘削機を提供することである。
【解決手段】上記した目的を解決するために、本発明における課題解決手段は、傾斜角検知手段で検知した掘削機本体のローリング角とピッチング角と、掘削機外設置機器を持たないヨーイング角検知手段で検知したヨーイング角とから掘削機本体の姿勢を推定し、推定した掘削機本体の姿勢に基づいてカッタヘッドの位置を制御することを特徴とする。
(もっと読む)
推進工法における掘削ヘッド回転速度検出装置
【課題】推進工法に用いる推進機を改造することなく掘削ヘッドの回転速度を検出できるようにする。
【解決手段】発進坑内に設置されたレーザーセオドライトからターゲットに向けてレーザー光線を照射するとともに、このレーザー光線を遮る状態と通過させる状態とを作り出す遮光部材がスクリュコンベアと一体に回転するように設ける。ターゲットは、レーザー光線を受光している状態と受光していない状態を識別するとともに、所定の時間内における受光状態の変化に基づいてスクリュコンベアの回転速度、したがってその先端に設けられている掘削ヘッドの回転数を演算し、その前面に設けられている表示器に表示する。この表示器をレーザーセオドライトで視認することにより、掘削ヘッドの回転数を容易に確認することができる。
(もっと読む)
小口径管泥水式曲線推進装置及び小口径管泥水式曲線推進工法
【課題】小口径管であっても、長距離の泥水式曲線推進を可能とする。
【解決手段】
小口径管泥水式曲線推進装置1は、ケーシング2と、ケーシング2の軸方向に固定された送泥管3及び排泥管4と、ケーシング2の端部に固定され、送泥管3及び排泥管4をそれぞれ取り付ける取付孔50,51を備えた接続ブロック5と、ケーシング2の軸方向に固定されたレール6と、ケーシング2に設けられ、小口径管7とケーシング2の間隔を保持する保持部材80と、を有する接続体8を備え、推進の前後方向を撮像するカメラ9と、カメラ9の近傍に設けたターゲット10と、カメラ9とターゲット10とを一体に固定するカメラキャリア11と、を備えている。
(もっと読む)
掘削孔曲がり度測定装置及びそれを用いた掘削孔曲がり度測定方法
【課題】口径が比較的小径で、曲がりがあるために見通しができない形状の掘削孔の曲がり度を、掘削孔の内部環境による影響を受けることなく、しかも、手間を要することなく、簡便に正確な測定ができる掘削孔の曲がり度測定装置及びそれを用いた掘削孔の曲がり度測定方法を提供する。
【解決手段】掘削孔内に挿入されて掘削孔の曲がり度に応じて曲がり可能にされた内部空洞の筒体20と、この筒体20の一端部側に配置されて筒体20の他端部側に向けてレーザー光を照射するレーザー発光部22と、筒体20の他端部側に設置されてレーザー発光部22からのレーザー光が照射されるスクリーン24と、スクリーン24よりも他端部側に配置されてスクリーン24を撮像する撮像手段26と、撮像手段26の撮像データを伝送する伝送手段28と、伝送された撮像データに基づいて筒体20先端の位置ずれを算出する制御装置とを有する。
(もっと読む)
3次元レーザスキャナを用いたトンネル掘削施工支援システム
【課題】トンネル掘削工事の作業が煩雑になることなく簡便に断面の計測、掘削断面、覆工断面の評価、管理を行うことができ、工期の短縮、施工精度の向上を図る。
【解決手段】トンネル壁面の複数箇所に設置されるターゲットのトンネル座標のデータ記憶手段と、トンネル断面の基準データ記憶手段と、比較断面の表示属性のデータ記憶手段と、3次元の計測データのターゲットの位置を認識してターゲットのスキャナ座標とデータ記憶手段に格納されたトンネル座標を求める認識処理手段と、ターゲットのスキャナ座標およびトンネル座標に基づき座標変換パラメータを求めスキャナ座標の計測データをトンネル座標の計測データに変換する座標変換処理手段と、トンネル座標の計測データと基準データとを比較演算して比較断面データを求める比較演算処理手段と、出力処理手段とを備え、表示属性のデータ203と比較断面データ208に基づき比較断面の情報を出力する。
(もっと読む)
1 - 20 / 65
[ Back to top ]