
Fターム[2D129BA08]の内容
Fターム[2D129BA08]に分類される特許
21 - 40 / 130
ドリルヘッド
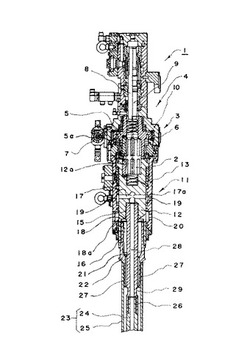
【課題】 削孔ロッドの切り離しおよび継ぎ足しを実施しても、ドリルヘッドとクリーニングスイベルのねじ結合の緩みを全く心配することがなく、削孔効率の向上を図ったドリルヘッドを提供する。
【解決手段】 ドリルヘッドは、トランスミッションハウジング内に、シャンクロッドと、このシャンクロッドを回転する回転駆動装置と、シャンクロッドを打撃する打撃装置と、を内蔵し、
前記シャンクロッドの下端にシャンクロッドと共に回動可能なジョイントアダプタが一体に連結され、このジョイントアダプタ部分は、前記トランスミッションハウジングに連続して設けられたシールケースで被覆されてクリーニングスイベルとなっている。
(もっと読む)
拡大翼を備えた掘削装置及び掘削方法

【課題】 拡大穴を掘削するときの掘削回数を自動的に設定する。
【解決手段】
下端に掘削刃6aと拡大翼7を備えた掘削ロッド5と、掘削ロッド5を駆動するオーガ駆動装置3と、前記掘削刃3aによる拡大穴掘削区域の掘削時における前記駆動手段の電動機4の負荷電流を測定する手段と、を有し、前記測定した電流値に基づき掘削刃6aの掘削力を求め、それに所定の低減率を付して拡大翼7による掘削力を算出し、前記拡大翼7の掘削力に基づき拡大穴の掘削回数を算出する。 前記掘削回数に基づき前記拡大翼7の拡開量を算出し、前記拡大翼7の拡開量に基づき前記拡大翼を拡開制御する。
(もっと読む)
杭引抜き用作業機
【課題】本発明は、杭引抜き用作業機に関し、引き上げるだけでなく押し込み作業もできて、狭い敷地でも容易にケーシング等の組立作業等が出来る様にすることが課題であって、それを解決することである。
【解決手段】走行体上に旋回装置を介して旋回体を設置し、前記旋回体に設けられるアームおよびブームから成る多関節アームの先端にほぼ前後方向に傾動可能にオーガ駆動装置を取り付け、前記オーガ駆動装置に杭の直径より大きい内径のケーシングを取り付け、前記ケーシングは下部に掘削爪を配設すると共にその下部の周囲に傾斜するか又は螺旋状の掘削羽根を設けており、前記ケーシング7をオーガ駆動装置6に対して前後左右に傾動可能に連結した杭引抜き用作業機1とするものである。
(もっと読む)
削岩制御方法および装置
削岩機(1)に属する打撃装置(7)による削岩を制御して、給送モータ(3)により工具を岩盤へ押し付けると同時に工具を回転モータにより回転させることによって工具(9)を介して岩盤へ応力波を送り、これによって、最大送り力を決め、圧力媒体を給送モータ(3)および回転モータ(8)へ供給し、送り力を穿孔条件に従って制御する方法および装置。送り力は送り速度および回転トルクに基づいて制御される。本装置は送りを制御する負荷制御弁を有する。 (もっと読む)
削岩リグ制御システム及び制御方法
削岩機の送りモータ(2)、打撃装置(4)及び回転モータ(3)である消費体への圧力流体供給を制御する油圧流体制御システム(1)であって、前記システムが、各消費体用の調整バルブ(6,7,8)を有し、調整バルブと各消費体との間に流体導管が設けられ、前記システムが、流体導管の少なくとも一つの接続及び遮断用の少なくとも一つの電気制御式補助バルブ(14)を備えた電子制御式補助制御ユニット(11)と、削岩機の少なくとも一つの部材に関する有効流体パラメータ値を感知し、かつ、センサ信号をセンサ入力信号is値として補助制御ユニットに送るための少なくとも一つのセンサと、前記センサ入力信号is値を受信するための少なくとも一つのパラメータセンサ入力信号入力部(S1−S5,I1−I5)と、各補助バルブの信号制御用の少なくとも一つの制御信号出力部(V1−V6)とを有する処理装置(12)とを備え、前記処理装置(12)が、前記センサ入力信号is値をパラメータshould値と比較し、比較結果に対する応答として少なくとも一つの補助バルブに制御信号を出力し、前記少なくとも一つの補助バルブに関する流体導管内の流体フローを調整するように構成されている。本発明は、削岩リグ及び方法にも関する。 (もっと読む)
杭穴掘削装置
【課題】掘削腕にのみに位置確認センサー、杭穴充填物確認センサーを設けて、リアルタイムで、掘削腕の位置と杭穴充填物の状況を把握できる。
【解決手段】掘削ヘッド1は、ヘッド本体2に揺動自在に、掘削刃7を有する掘削腕6を取り付けて構成する。掘削腕6の上部に加速度計16を取り付ける。掘削腕6の下部の裏面に絶縁計17を取り付ける。加速度計16、絶縁計17からのケーブルを、第1センサーノード21に接続する。第1センサーノード21のデータは中継用の第2センサーノード22で受信して、情報の掘削ロッドの送受信ノードで中継して地上に転送する。
(もっと読む)
アースドリル及び杭打ち機
【課題】例えば、リーダを備えない杭打ち機を用い、削孔箇所に礫が埋まっていたり、強度が一様でない地盤を削孔する場合であっても、高精度で削孔することのできるアースドリル及び杭打ち機を提供することを目的とする。
【解決手段】ドリルシャフト20の下端にドリルヘッド40を備えたアースドリル10であって、ドリルヘッド40の上方に、ドリルシャフト20に対して自在固定具34によって回転自在に固定された中空のケーシング30を備え、ドリルシャフト20におけるケーシング30に対向する外周面に径外側向きのシャフト側撹拌翼21を備え、ケーシング30の内周面に径内側向きのケーシング側撹拌翼33を備え、ドリルシャフト20に対するケーシング30の共回りを阻止する係止リブ32を備えた。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及びトンネル施工機械におけるブーム移動制御方法
【課題】既存の削岩機搭載台車に対し、大掛かりな改造を必要とすることなく極簡単に穿孔位置決め制御機構を持たせるようにする。
【解決手段】モニタ2上に、ガイドシェル先端側の移動目標点P、P…と、ガイドシェル後端側の移動目標点K、K…とをマーク表示し、前記ガイドシェル12の先端側及び後端側を夫々移動目標点P、Kに合わせるようにガイドシェル12を移動制御する。この際、前記ガイドシェルの先端側にモニタ2上で物体認識可能なように発光体25を取り付けておき、発光体25のモニタ上での座標を把握するとともに、カメラ座標系における方向ベクトルを特定し、カメラ座標系において、方向ベクトルに基づき前記カメラの設置点を通り前記ガイドシェルの先端側に向けた空間直線Uを想定し、前記ガイドシェル先端側の移動目標点Pから前記空間直線Uに下ろした垂線の距離Lをモニタ画面上に表示する。
(もっと読む)
ロック装置つき振り子型拡大ヘッド
【課題】 正転掘削時に拡大翼の拡開を抑止し、逆転によりその抑止を解除して土圧による拡開を可能にするロック装置を付与する。
【解決手段】 拡大ヘッド本体が、上部本体と下部本体とを、互に所定角度だけ正逆自由回転可能の状態で、回転伝達可能に接続してなり、
上記下部本体に、下端に掘削刃を有する振り子型拡大翼の上端部を、該拡大ヘッド本体の縦断面と平行の面上で、閉縮位置から拡開位置の範囲で揺動自在に軸支し、
上記下部本体に、正転時において、上記拡大翼が閉縮位置から拡開位置へ揺動するのを阻止すべく該拡大翼に係脱自在に係止するロック部材を設け、
上記上部本体に、該上部本体の上記自由逆転により、上記ロック部材の上記拡大翼に対する拡開揺動阻止を解除すべく上記ロック部材を押すロック解除部材を設けた、
ロック装置つき振り子型拡大ヘッド。
(もっと読む)
拡底バケット、ケーシング、及び拡底杭の構築方法
【課題】従来技術に比して、施工性が良く、故障する可能性が低く、そのうえ、安価に実施することができる拡底バケットを提供する。
【解決手段】下端部に切刃2aが形成されているとともに、下端部近傍の内側面に係止部としての係止孔2bが形成された円筒状のケーシング2の下部に装着される拡底バケット1であって、円筒状の本体部1Aと、本体部1Aの直径を拡大させるように開放可能に形成された拡幅翼部12,12と、拡幅翼部12,12を拡大させるように開放する際には、ケーシング2の係止孔2bへ係合され、ケーシング2内から引き抜く際には、係止孔2bとの係合が解除される本体部1Aの上部に設けられたストッパー部3とを備えた構成とされている。
(もっと読む)
発破穿孔さし角制御システム
【課題】少ないセンサで穿孔さし角を制御し、発破効率の向上、余掘りの低減を実現することができ、汎用性が高く、コスト削減が可能な発破穿孔さし角制御システムを提供する。
【解決手段】穿孔始点設定手段によって設定した穿孔始点位置でブーム14に支持されたガイドセル18上を平行に稼動する穿孔機16を用いて穿孔を行う際の発破穿孔さし角制御システムであって、ブーム14に取り付けられてブーム14の水平角を検出することでガイドセル18の水平角を検出する水平角検出センサ34、36と、ブーム14に取り付けられてガイドセル18の鉛直角を検出することでガイドセル18上を平行に稼動する穿孔機16先端の鉛直角を検出する鉛直角検出センサ38とを有し、水平角検出センサ34、36により検出された水平角と、鉛直角検出センサ38により検出された鉛直角とに基づいてガイドセル18上の穿孔機16先端の穿孔さし角を設定可能とされている。
(もっと読む)
削孔機
【課題】削孔に係わる作業精度と作業効率を簡便かつ安価な手法で改善する。
【解決手段】台車1とブーム4とガイドシェル5とドリフター6と削孔ロッド7を備えるドリルジャンボに、作業員による操作を案内するためのガイド手段を備える。ガイド手段は、削孔ロッドによる削孔角度および削孔距離を検知する検知手段と、予め設定した目標削孔角度および目標削孔距離を表示するとともに前記検知手段により検知した実際の削孔角度および削孔距離を併せて表示する表示手段としてのモニタを備える。検知手段は、台車とブームとガイドシェルとドリフターの位置およびそれらの姿勢を検出するセンサ13〜17と、各センサによる検出情報に基づいてその時点の削孔角度および削孔距離を演算し記憶する演算記憶手段としてのプログラマブルコントローラとにより構成される。
(もっと読む)
孔内データ収集システム
【課題】伝送速度及び伝送可能深度を十分大きくでき、そのため孔内データをリアルタイムで伝送することができ、しかもシステムを安価に構築でき、システム維持も容易に行えるようにする。
【解決手段】孔内データを得るためのセンサー及び関連機器を搭載した計測ゾンデ10と、計測ゾンデを吊り下げるワイヤー12と、ウインチ装置14と、地上観測装置16を具備し、ワイヤーにより計測ゾンデを孔内に挿入し、計測した孔内データを地上観測装置で収集するシステムである。ワイヤーは、長手方向に複数箇所に分散配置したロータリージョイント18を介して複数の多芯ケーブル20を機械的並びに電気的に順次接続した1本のケーブル構造体であり、ロータリージョイントは、ロータリー式の信号カプラを内蔵し、上部ケーブルと下部ケーブルとの間での相対回転が許容され、且つ多芯ケーブルの抗張力と同等以上の引張耐力を有し、電気信号の伝送を可能とする。
(もっと読む)
杭施工機
【課題】絞り込み機構を備える杭施工機において、絞り込み機構非作動時に掘削ロッドの貫入速度が速まったり、掘削ロッド引き抜時の速度が低下したりしても、絞り込み用索体が弛んで滑車から外れたり、周囲の部材に絡まったりせず、常に正常な作動を確保出来る方法の提供。
【解決手段】リーダに取り付けられたオーガマシン3とリーダー基部1aとの間に、滑車を介してワイヤー4Bが巻き掛けられ、これを絞り込む機構Sを具備する杭施工機Mにおいて、ウエイト7がワイヤー4Bの途中部分に昇降自在に吊持され、ウエイト7の高さを第一基準位置L1で検知するリミットスイッチ9Aと、ウインチドラム6Bの回転速度を制御する制御装置19とを備える。ウインチドラム6Bは、掘削ロッドの貫入時には、ウエイト7が基準位置L1まで下がった際に巻取り速度を速め、引き抜き時にはウエイト7が基準位置L1まで下がった際に巻出し速度を遅らす。
(もっと読む)
ロッド状部品の操作方法、セントラライザおよび削岩ユニット
本発明は、掘削ロッドの操作方法、セントラライザおよび削岩ユニットに関する。ロッド(9、18)を削岩ユニット(4)またはボルティング装置の中心(K)へ交換装置(13)によって導入し、また中心から離脱せせることが可能である。中心に位置するロッドはセントラライザ(16)により支持され、その中心穴(20)を通してロッドが配置される。セントラライザ(22)は、交換装置の操作に応じて開閉される閉鎖部材(22)を含む。交換装置の回動は押出しロッド(25)に影響を及ぼし、ロッドは閉鎖部材の形状固定を解除してこれを開位置へ送る。交換装置が通常位置に戻ると、付勢部材(26)によって押出しロッドが通常位置に戻ると同時に、閉鎖部材が再び形状固定される。閉鎖位置において、閉鎖部材は堅く形状固定される。 (もっと読む)
リテーナの使用方法およびリテーナ
本発明は、リテーナを使用する方法およびリテーナに関するものである。リテーナ(14)はドリルロッド、ロックボルトまたは同様のものを締め付ける締め付けジョー(21a,21b)を設けた第1の締め付けアーム(18a)および第2の締め付けアーム(18b)を含む。締め付けアームをそれらの回転軸継手(19a、19b)に対してアクチュエータ(20)によって回転させ、これによって締め付けジョーを互いに向けて動かし、または互いから離す。締め付けアームの回転軸継手の間の部分には、形状部材があり、それは締め付けアームの運動を相互に連絡して相互に依存させ、これによって締め付けアームの運動を締め付けアームの両運動方向において同期化する。 (もっと読む)
杭打装置
【課題】掘削及び杭打作業を容易かつ能率的に行うことができるとともに、施工精度の向上を図ることができる杭打装置を提供する。
【解決手段】複数種の作業体を上下動可能に支持するためのリーダー24を、軸線L方向に沿って3つの部分に分割する。中間分割部24bをブーム23に支持するとともに、上方分割部24a及び下方分割部24cを中間分割部24bに対して軸線Lを中心に回転可能に支持する。上方分割部24aと下方分割部24cとの間には、複数種の作業体を軸線Lを中心とする円周方向へ所定角度間隔をおいた状態で軸線L方向に沿って移動可能に支持する。中間分割部24bには、上方分割部24a及び下方分割部24cを回転させて1つの作業体を使用位置Uに選択配置するための回転機構35A,35Bを設ける。中間分割部24bには、使用位置Uに選択配置された作業体の軸線方向への移動を案内するためのガイドレール43を設ける。
(もっと読む)
掘削装置及び掘削方法
【課題】
掘削装置のオーガヘッドに取り付けた拡大ヘッドの掘削径及掘削孔壁の連続性を、簡易な構造により地上で確認できるようにする。
【解決手段】
オーガヘッド7を回転駆動する掘削ロッド4に沿って、その両側に配置された外ロッド8を、油圧ジャッキ20aで掘削ロッド3に対して相対的に上下動できるようにする。その上下動により、外ロッド8の下端部及び掘削ロッド3に取り付けられたパンタグラフを構成する拡大ヘッド73の拡大翼73aを拡縮する。オペレータは、外ロッド8の掘削ロッド3に対する相対変位量に基づき、拡大ヘッド73(一対の拡大翼73a)の拡大量、即ち、その掘削径を確認することができる。
(もっと読む)
油田用ねじ込み接続部
ねじ込み油田用筒状接続部が、雌ねじ16、18を有するボックスコネクタ12および雌ねじと嵌合する雄ねじ22、24を有するピンコネクタ14を含む。ボックストルクショルダ20およびピントルクショルダ26の各々は、負の角度のショルダであり、雌ねじおよび雄ねじのねじフランクも負の角度の負荷フランクである。締結中にドープがねじ間に閉じ込められる時、コネクタが所望の事前荷重を実質的に維持する。その他の実施形態は正の角度のトルクショルダおよび正の角度の負荷フランクを提供する。 (もっと読む)
杭穴掘削ヘッド
【課題】掘削ロッドの正回転のみで異なる径の掘削ができる。
【解決手段】掘削ヘッド50は、掘削ロッド52との連結軸部5を有するヘッド本体1に、先端に掘削刃24を設けた掘削腕15、15を取り付けてなり(a)、揺動角度を変えて、ニュートラル位置(a)、小径掘削位置(b)、大径掘削位置(c)を取る。掘削腕15が下方に垂れたニュートラル位置で、揺動スペーサー30はニュートラル状態にある(a)。掘削ロッド52が正回転し掘削腕15の揺動により、揺動スペーサー30は、回転軸37廻りに回動して一側面17と第1大径ストッパー43との間に介在され(装着状態)、径D1の杭穴軸部60を掘削できる(b)。一旦、掘削ロッド52の回転を止めると、揺動スペーサーは、下方に外れ(脱状態)、掘削ロッド52を正回転すれば、径D2の拡大根固め部61の掘削ができる(c)。
(もっと読む)
21 - 40 / 130
[ Back to top ]