
Fターム[2D129BA15]の内容
Fターム[2D129BA15]の下位に属するFターム
特に表示機能 (14)
Fターム[2D129BA15]に分類される特許
1 - 20 / 25
掘削状態監視システム
【課題】電波減衰の大きな泥水やセメントミルク中であってもリアルタイム伝送を可能とし、さらにコストやユーザの電池交換の手間を削減した掘削状態監視システムを提供する。
【解決手段】掘削ヘッドにセンサ及び送信ノードを搭載し、ロッドに中継ノードを搭載することにより、送信ノードがセンサを用いて計測した例えばセメントミルク濃度の計測情報を無線パケット化し、地上の監視装置まで伝達させる。各ロッドの中継ノードにもセンサを搭載すれば、掘削ヘッドを移動せずに掘削孔内のセメントミルク濃度分布を知ることができる。振動センサを搭載すれば、作業を行わない時間帯での省電力化をすることができる。
(もっと読む)
削孔ロッドの配置角管理システム及び配置角管理方法

【課題】削孔ロッドの配置角を容易にかつ高い精度で管理することができる汎用的なシステムを提供する。
【解決手段】地盤Gを削孔するに先立ち当該地盤G上に配置された削孔ロッド3の配置角を管理するシステム1であって、削孔ロッド3に装着可能とされ、かつ当該装着状態において削孔ロッド3の傾斜角α及び真方位角を計測可能とされたモノリシックリングレーザジャイロ10と、このジャイロ3によって計測された計測傾斜角及び予め計画された計画傾斜角、並びにジャイロ10によって計測された計測真方位角及び予め計画された計画真方位角を、それぞれ対照可能に表示する配置角表示手段20と、を有する。
(もっと読む)
曲がりボーリング工法及びこれに用いる削孔装置
【課題】 従来適用が不可能であった硬質地盤であっても適用可能であり、効率よく精度の高い削孔を行うことが可能な曲がりボーリング工法及びこれに用いる削孔装置を提供する。
【解決手段】 削孔管20の先端に取り付ける先細状の先端ビット40の基端側に、中空部が形成されたハンマー50を配設して、削孔工程で当該ハンマー50により先端ビット40を打撃することにより、削孔管20の圧入を補助する。また、ハンマー50の中空部を介して先端ビット40の基端側まで位置計測用のジャイロスコープ30を挿入して削孔管20の位置計測を行う。そして、削孔終了後に、孔の先端部付近まで薬液注入管70を挿入して、地盤中に薬液注入を行う。
(もっと読む)
杭打機
【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
(もっと読む)
建設機械用安全装置
【課題】キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置を提供する。
【解決手段】キャリアユニット10に対する駆動ユニット18の現在位置を1個又は複数個の検出手段28,29で検出する。建設機械1の傾きに対し所与レベルの安全性を提供しつつ駆動ユニット18を動かせる可動範囲を、1個又は複数個の入力値に基づき、評価ユニット22が1個又は複数個定める。表示手段20が、キャリアユニット10に対する駆動ユニット18の現在位置と併せ、その可動範囲を表示する。
(もっと読む)
位置決め情報の表示方法、ユーザインターフェースおよび削岩リグ
本発明は、穿孔穴を扇形状パターンとして穿孔するときに削岩リグの穿孔ユニットの位置決め情報を表示する方法に関する。さらに本発明は、ユーザインターフェースおよび削岩リグに関する。ディスプレイ装置(25)によって、穿孔穴の情報および扇形部平面に対する穿孔ユニット(6)の位置および方向を表示する。ディスプレイ装置は、少なくとも2つの分割画面(31a、31b)を有する表示画面(30)を操作者に示し、これに基づいて操作者は、位置決めに関する全自由度の情報を同時に得ることができる。操作者は、制御装置(16)に接続されたディスプレイ装置および少なくとも1つの操作部材(15)を含むユーザインターフェース部(29)により位置決めを制御する。 (もっと読む)
破砕ハンマの使用率測定方法、破砕ハンマおよび測定装置
本発明は、破砕ハンマの使用率測定方法および測定装置、ならびに削岩装置に関する。測定装置(10)は、衝撃装置(4)の動作によって生じる物理現象を測定するセンサ(11)を含む。測定結果を処理し、これを使って衝撃装置の動作の開始時間と終了時間を測定する。タイミング装置(61)を用いて、衝撃サイクル(IC)の期間長を測定し、これを時間カウンタ(62)へ加算することができる。時間カウンタへ累積的に加算した衝撃サイクルの期間長は破砕ハンマの総衝撃時間を示す。衝撃サイクル間で衝撃中断(IP)もモニタし、所定の時間限界値(tstop2)より短い中断は使用率の一部として考慮される。 (もっと読む)
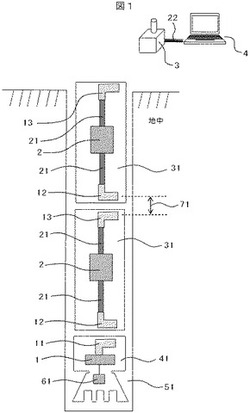
削孔位置計測方法およびシステム
【課題】計測誤差を小さくして削孔位置を高い精度で計測できる削孔位置計測方法およびシステムを提供する。
【解決手段】削孔管9の地上に突出した端部に延長管10を連結し、削孔管9および延長管10の内部でジャイロスコープ3を移動させつつ取得したジャイロスコープ3の検知データおよびエンコーダ4により検知したジャイロスコープ3の移動長さのデータに基づいて、制御装置5によってジャイロスコープ3の移動軌跡を算出するとともに、延長管10において離間する2つの基準位置Pa、Pbでのジャイロスコープ3の3次元座標を基準位置座標検知手段11により検知し、ジャイロスコープ3の移動軌跡のデータと基準位置座標検知手段11により検知した2つの3次元座標のデータに基づいて制御装置5により削孔位置を算出してモニター6に表示する。
(もっと読む)
杭穴掘削装置
【課題】掘削腕にのみに位置確認センサー、杭穴充填物確認センサーを設けて、リアルタイムで、掘削腕の位置と杭穴充填物の状況を把握できる。
【解決手段】掘削ヘッド1は、ヘッド本体2に揺動自在に、掘削刃7を有する掘削腕6を取り付けて構成する。掘削腕6の上部に加速度計16を取り付ける。掘削腕6の下部の裏面に絶縁計17を取り付ける。加速度計16、絶縁計17からのケーブルを、第1センサーノード21に接続する。第1センサーノード21のデータは中継用の第2センサーノード22で受信して、情報の掘削ロッドの送受信ノードで中継して地上に転送する。
(もっと読む)
土圧による拡縮式の拡大ヘッドの拡開確認方法
【課題】 拡大翼の拡開を正確に確認する。
【解決手段】 掘削作業ロッドの下端に接続されたヘッドロッドの外周部に、拡大翼を掘削作業ロッドの正転時に土圧により閉縮し、逆転時に土圧により拡開可能に支持した拡大ヘッドを使用し、
外部から圧力流体を上記拡大翼近くで外部に開閉可能の放出孔まで圧送し、
上記放出孔に対し、上記拡大翼を、該拡大翼が閉縮位置にあるとき上記放出孔を閉じ、所定の拡開位置に開いたとき上記放出孔を開いて上記圧力流体を外部へ放出するように関連させ、
上記圧力流体の上記放出孔から外部への放出による圧力低下をもって上記拡大翼の所定拡開位置への拡開を確認する、
土圧による拡縮式の拡大ヘッドの拡開確認方法。
(もっと読む)
発電機能を持つ杭穴掘削ロッド
【課題】掘削ロッド内に使用する電力を掘削中に生成して、外部からの供給を不要にできる。
【解決手段】掘削ロッド1は、ロッド本体10の下端11bに、掘削ヘッド40を連結して構成する。ロッド本体10には、掘削土を破砕する撹拌バー15を設けてあり、撹拌バー15はロッド本体10に対して回転自在な回転筒16に撹拌羽根17を突設して構成する。ロッド本体10に杭穴壁を均す練り付けドラム21を設けてある。撹拌バー15は回転するロッド本体10と、ロッド本体10に追随しない回転筒16の一方にコイル、他方に磁石を取り付けて発電手段とする。練り付けドラム21は、側面を略水平方向に開放し、回転する回転羽根29を設けて、発電手段とする。掘削ヘッド40には掘削腕46の揺動角度を計測するセンサが設けられ、電力消費手段とし発電手段に接続する。掘削ロッド1の回転に従い、発電手段で発電され、電力消費手段で消費される。
(もっと読む)
建設作業機械
【課題】密閉されたオペレータキャビンに収容されている作業オペレータが対象加工機構の作業状態を良好に確認することができる建設作業機械を提供する。
【解決手段】油圧クローラドリル1は、作業オペレータWOがオペレータキャビン6に密閉された状態で削岩ドリルユニット4により削孔するので、その削孔音がオペレータキャビン6により多分に遮蔽される。しかし、この削孔音をオペレータキャビン6の外部に位置するマイクロフォン11が入力し、オペレータキャビン6の内部に位置するスピーカユニット13が再生する。このとき、削孔の状態確認に適正な周波数帯域のみ削孔音を再生することで、密閉されたオペレータキャビン6に収容されている作業オペレータWOが削岩ドリルユニット4の作業状態を良好に確認することができる。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及びトンネル施工機械におけるブーム移動制御方法
【課題】サーボ機構を有しない既存の削岩機搭載台車に対し、大掛かりな改造を必要とすることなく極簡単に穿孔位置決め制御機構を持たせるようにする。
【解決手段】穿孔前に、前記削岩機搭載台車の座標及び姿勢状態を計測することにより、前記カメラ9A、9Bの設置座標及び向きを既知とし、切羽面を撮影しているカメラ映像を前記モニタ2に表示し、前記コンピュータ3からの信号により前記モニタ2上に、切羽削孔点P、P…をマーク表示するとともに、削孔姿勢に応じたガイドシェル12の後端部位置K、K…をマーク表示し、前記削岩機13の削孔ビット13aを前記切羽削孔点Pのマーク表示点に合わせるとともに、前記ガイドシェル12の後端部を前記ガイドシェル後端部位置Kのマーク表示点に合わせるようにガイドシェル12を移動制御する。
(もっと読む)
基礎杭施工における根固め球根部の形状確認システム
【課題】基礎杭用の掘削穴の途中や下部に根固め球根部を造築する基礎杭施工において、造築された根固め球根部の形状を的確に確認することができる、基礎杭施工における根固め球根部の形状確認システムを提供する。
【解決手段】掘削治具Kに取り付けられた拡大翼変化計測記憶手段21によって、拡大翼4の拡径・縮径状態の経時的変化を直接計測して記憶し、その直接計測された拡大翼の拡径・縮径状態の経時的変化と、拡大翼深度計測記憶手段22によって計測された拡大翼の深度の経時的変化とを統合することによって、根固め球根部50の形状を検知する。
(もっと読む)
拡大ヘッドにおける拡大翼拡開確認装置
【課題】 シリンダ一方駆動型流体圧式拡大ヘッドにおける拡大翼の拡開を、圧力計と流量計の目視により確認する欠点を除くことを課題とする。
【解決手段】 シリンダへの圧力流体供給管に、圧力発信器と流量発信器設け、
上記圧力信号及び流量信号を制御回路に送り、該制御回路により拡大翼拡開完了信号を発信し、
上記拡大翼拡開完了信号を報知器に送って作業員に拡大翼拡開を報知するようにした、
拡大ヘッドにおける拡大翼拡開確認装置。
(もっと読む)
杭穴掘削管理方法及び装置
【課題】掘削液(水)とセメントミルク(高温)の温度差を利用して、杭穴内にいずが吐出されているかを現場内に通報する。
【解決手段】掘削液(水)を第一液タンク16に、セメントミルクを第二液タンク17に収容する。共通搬送管20の一端21を掘削機1のジョイント4に、他端21aを切り替えバルブ23(第一液タンク16、第二液タンク17)に接続する。共通搬送管20の一端21側に温度センサー23を設置し、掘削機1と切り替えバルブ18の周辺に警報灯24を設置して掘削装置25とする(a)。切り替えバルブ23を第一液タンク16側に適宜開いて、掘削液を用いて杭穴32を掘削する(b)(c)。切り替えバルブ18を第二液タンク17側に開いて、セメントミルク35を吐出しながら掘削ロッド10を地上に引き上げれば(d)、温度センサー23によりセメントミルクが感知され警報灯24が点灯する。
(もっと読む)
掘削装置および基礎杭施工時の拡大翼状態判定装置
【課題】機械式の拡大翼であったとしても、地上部において、拡大翼の拡径を簡便且つ確実に確認することが可能にする。
【解決手段】掘削ロッド1の先端部に対し拡径可能に支持される拡大翼4を備える基礎杭施工用の掘削装置による掘削で使用される。上記拡大翼4が拡径・縮径する際の可動部、若しくは掘削ロッド1の先端部に取り付けられて、拡大翼4の少なくとも縮径状態から拡径状態への変化を検出する傾斜センサ20と、その傾斜センサ20から信号を入力すると、掘削ロッド1を振動させて、弾性波として信号を送信する発信装置20と、地上部において、掘削ロッド1を伝搬してきた弾性波を検出する受信装置とを備える。
(もっと読む)
岩洞掘削用穿孔パターンの設計
本発明は、穿孔パターンを設計する方法およびソフトウエア製品と、さらに制御装置において穿孔パターンの設計用ソフトウエア製品を実行可能な削岩リグに関する。穿孔パターン(12)の1群の孔(14、15、16、32、17)について、少なくとも1つの優勢要因を有する少なくとも1つのマスタ孔(13a、13e、17a、17b、35、45、48)を決定することができる。マスタ孔の優勢特性に基づいて、少なくとも1つの他の穿孔の特性を決定する。マスタ孔は孔位置マスタ、孔深度マスタでよい。 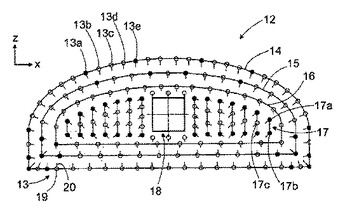 (もっと読む)
(もっと読む)
拡径場所打ち杭用孔の拡径寸法測定装置
【課題】地盤に無水堀りした拡径場所打ち杭用孔の杭底部の寸法等を測定する拡径寸法測定装置を提供する。
【解決手段】削孔機のケリーバー等の先端に取り付けられケーシング内に収納された撮像手段と、ケーシングの外に設置された杭径確認用定規と、定規の傾動手段と撮像手段で撮像された映像を映し出す出力表示手段とから構成され、ケーシングはケリーバー等の先端へ取り付けられ、杭径確認用定規が上方へ傾斜した小径位置の状態で拡径場所打ち杭用孔内の下方へ移動され、ケーシングが拡径部に到達すると、杭径確認用定規を漸次水平位置に降ろして孔壁に接触させ、且つケリーバーを回転させて杭径確認定規が孔壁に接触されている状況を孔壁全周に亘って撮像手段に撮像させ出力表示手段へ映し出させる。
(もっと読む)
地盤改良装置および掘削施工方法
【課題】簡便且つ低コストに回転軸の傾斜度を計測することができ、回転軸の鉛直精度の向上に寄与することのできる地盤改良装置を提供する。
【解決手段】リーダー103の下端部に設けた下部振れ止め機構150のフレーム内に、鉛直な軸回りに回転可能な4個以上の水平回転ローラ152を周方向に間隔をおいて配置し、それら水平回転ローラを各々横荷重計301を介してフレームにより回転自在に支持し、水平回転ローラの内側に内接させ且つ落下を止めた状態で、鉛直な軸回りに回転可能に回転筒153を配置し、その回転筒の内周に周方向に間隔をおいて、水平な軸回りに回転可能な3個の垂直回転ローラ154を配置し、垂直回転ローラの内側に内接するように回転軸101を貫通させて、横荷重計の測定値のバランスにより回転軸の傾斜度を測定する。
(もっと読む)
1 - 20 / 25
[ Back to top ]