
Fターム[2D129CA21]の内容
Fターム[2D129CA21]の下位に属するFターム
Fターム[2D129CA21]に分類される特許
1 - 3 / 3
杭建込み施工管理装置およびプログラム
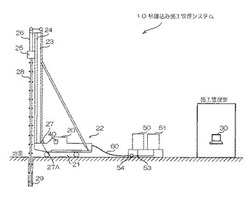
【課題】施工品質を向上させることのできる杭建込み施工管理装置およびプログラムを得る。
【解決手段】杭建込み施工管理装置30により、管理対象とする杭の少なくとも径および長さが含まれる杭仕様情報、および杭を建込む地盤の土質を示す土質情報を取得し、取得した杭仕様情報および土質情報に基づいて、掘削機20により、建込み孔を掘削により造成した後に当該建込み孔に杭を建込む施工を行う際の、施工時間の経過に伴う建込み孔の造成時の掘削ヘッドの先端位置および杭の建込み時の当該杭の先端位置の変化を示す施工サイクルタイム情報を導出し、杭建込み施工支援装置40により、施工サイクルタイム情報に基づいて、当該施工サイクルタイム情報により示される施工時間の経過を一方の軸とし、掘削ヘッドの先端位置および杭の先端位置を他方の軸としたグラフを示すグラフ情報を作成し、作成したグラフ情報により示されるグラフを表示する。
(もっと読む)
ハンマーグラブ制御システム

【課題】2つのシェルが固有のシリンダ機構にて姿勢制御されるハンマーグラブの制御システムに関し、簡易な構造で、各シェルのスムースで継続的な姿勢制御を保障することのできる、ハンマーグラブ制御システムを提供する。
【解決手段】制御システム200は、第1、第2、第3のシリンダ機構10、20、30と、これらの機構を構成するシリンダ内でピストン12,22,32にて分割された各第1の領域を流体連通する第1の流路系40、各第2の領域を流体連通する第2の流路系50と、第1、第2のロッド13,23に装着されたシェル61,62から構成されたハンマーグラブ60と、からなり、さらに、第2の流路系50に流体連通する第3の流路系90を介して第4のシリンダ機構80を備え、ハンマーグラブ60の姿勢制御の際に各ピストン12,22,32を進退させる際に不足する量の流体が第4のシリンダ機構80から提供されるようになっている。
(もっと読む)
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。 (もっと読む)
1 - 3 / 3
[ Back to top ]