
Fターム[2D129CA37]の内容
地中削孔 (15,828) | 制御 (657) | 特にさく岩機の自動制御 (78) | さく孔パターン (19)
Fターム[2D129CA37]の下位に属するFターム
Fターム[2D129CA37]に分類される特許
1 - 15 / 15
削岩リグおよびその位置決め方法
位置決め情報の表示方法、ユーザインターフェースおよび削岩リグ

本発明は、穿孔穴を扇形状パターンとして穿孔するときに削岩リグの穿孔ユニットの位置決め情報を表示する方法に関する。さらに本発明は、ユーザインターフェースおよび削岩リグに関する。ディスプレイ装置(25)によって、穿孔穴の情報および扇形部平面に対する穿孔ユニット(6)の位置および方向を表示する。ディスプレイ装置は、少なくとも2つの分割画面(31a、31b)を有する表示画面(30)を操作者に示し、これに基づいて操作者は、位置決めに関する全自由度の情報を同時に得ることができる。操作者は、制御装置(16)に接続されたディスプレイ装置および少なくとも1つの操作部材(15)を含むユーザインターフェース部(29)により位置決めを制御する。 (もっと読む)
削岩リグ、岩盤穿孔方法および削岩リグの制御システム

本発明は、削岩リグ、削岩方法、および削岩リグの制御システムに関する。削岩リグ(1)は、穿孔穴(21)を穿孔穴パターンとして穿孔する穿孔ユニット(6)を含む。穿孔ユニットの位置が決められ、制御装置(16)は、与えられた目標位置に基づいて操作部材(19)を使って、穿孔ユニットの位置に影響を与えるアクチュエータ(19)を制御するように構成されている。操作部材のそれぞれ個々の操作方向は、1つの座標もしくは方向角についてのみ目標位置に影響を与えるように構成されている。さらに、操作部材の操作方向は穿孔ユニットの運動方向に対して直感的であるように構成されている。 (もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及びトンネル施工機械におけるブーム移動制御方法
【課題】既存の削岩機搭載台車に対し、大掛かりな改造を必要とすることなく極簡単に穿孔位置決め制御機構を持たせるようにする。
【解決手段】モニタ2上に、ガイドシェル先端側の移動目標点P、P…と、ガイドシェル後端側の移動目標点K、K…とをマーク表示し、前記ガイドシェル12の先端側及び後端側を夫々移動目標点P、Kに合わせるようにガイドシェル12を移動制御する。この際、前記ガイドシェルの先端側にモニタ2上で物体認識可能なように発光体25を取り付けておき、発光体25のモニタ上での座標を把握するとともに、カメラ座標系における方向ベクトルを特定し、カメラ座標系において、方向ベクトルに基づき前記カメラの設置点を通り前記ガイドシェルの先端側に向けた空間直線Uを想定し、前記ガイドシェル先端側の移動目標点Pから前記空間直線Uに下ろした垂線の距離Lをモニタ画面上に表示する。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及びトンネル施工機械におけるブーム移動制御方法
【課題】サーボ機構を有しない既存の削岩機搭載台車に対し、大掛かりな改造を必要とすることなく極簡単に穿孔位置決め制御機構を持たせるようにする。
【解決手段】穿孔前に、前記削岩機搭載台車の座標及び姿勢状態を計測することにより、前記カメラ9A、9Bの設置座標及び向きを既知とし、切羽面を撮影しているカメラ映像を前記モニタ2に表示し、前記コンピュータ3からの信号により前記モニタ2上に、切羽削孔点P、P…をマーク表示するとともに、削孔姿勢に応じたガイドシェル12の後端部位置K、K…をマーク表示し、前記削岩機13の削孔ビット13aを前記切羽削孔点Pのマーク表示点に合わせるとともに、前記ガイドシェル12の後端部を前記ガイドシェル後端部位置Kのマーク表示点に合わせるようにガイドシェル12を移動制御する。
(もっと読む)
寸法石の切出し方法および列掘削装置
本発明は、寸法石の切出し方法ならびにそれに使用される列掘削装置に関する。掘削装置(8)は組み枠なしであって、第1のブーム(11)と第2のブーム(12)を有し、その間には、ブームを互いに対して動かすことができる連結機構(13)が配設されている。さらに、連結機構に関連して石支持部(14)が配設され、これは、掘削装置を掘削孔列(6)の近傍に一度おおまかに配置すると、石に対して当接可能である。掘削装置の掘削孔列方向への微調整位置決めは、連結機構によって構成された連結部によって行なわれる。掘削孔(7)の位置決めは、第2のブーム(12)を弧状の運動経路に沿って回転することにより、および掘削ユニット(15)を掘削しようとする石の方に回転させることにより行なう。 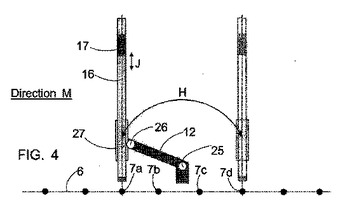 (もっと読む)
(もっと読む)
曲線トンネルにおける穿孔パターン配向方法、岩盤掘削装置およびソフトウェア製品
本発明は岩盤掘削装置の制御部において実行されるトンネル曲線計算における穿孔パターンの配向決定方法に関するものである。本発明はさらに、その方法を実現するソフトウェア製品および岩盤掘削装置に関するものである。掘削されるトンネルのトンネル径路(16)を、たとえばカーブフィッティングを用いて決定する。トンネル径路における掘削現場の位置を制御部(11)に伝達し、穿孔パターン(28)の誘導面(19)をトンネル径路上に配置する。円の開始点(30)をトンネル径路(16)に配置し、さらに円の長さ(L)を与える。さらに、円の終点(31)を開始点から円の長さに相当する距離に配置し、穿孔パターン(29)の座標系の座標軸の1つが開始点から終点を示すように穿孔パターンを配向する。最後に、異なる座標系を変換する。 (もっと読む)
掘削パターン変更方法、削岩装置、およびソフトウェア製品
本発明は、掘削パターン変更方法およびソフトウェア製品、ならびに削岩装置に関するものである。掘削を行う前に、位置を変更すべき1または複数の穴(23)を、掘削パターン(22)から選択してよい。穴の新たな位置(37)が掘削ユニット(5)によって割り当てられ、次いで掘削パターンが更新される。 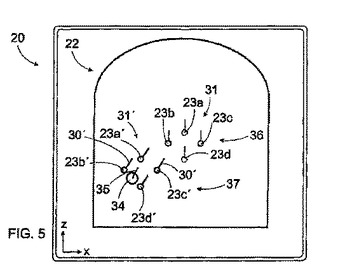 (もっと読む)
(もっと読む)
岩洞掘削用穿孔パターンの設計
本発明は、穿孔パターンを設計する方法およびソフトウエア製品と、さらに制御装置において穿孔パターンの設計用ソフトウエア製品を実行可能な削岩リグに関する。穿孔パターン(12)の1群の孔(14、15、16、32、17)について、少なくとも1つの優勢要因を有する少なくとも1つのマスタ孔(13a、13e、17a、17b、35、45、48)を決定することができる。マスタ孔の優勢特性に基づいて、少なくとも1つの他の穿孔の特性を決定する。マスタ孔は孔位置マスタ、孔深度マスタでよい。 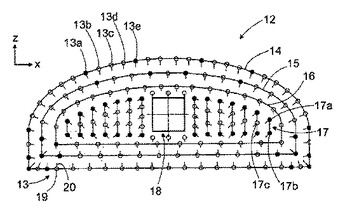 (もっと読む)
(もっと読む)
岩盤穿孔方法
本発明は岩盤穿孔方法に関するものであり、穿孔に先立って、穿孔すべき孔(2ないし9、9aないし11a)を穿孔パラメータとして決め、各孔(2ないし9、9aないし11a)ごとに穿孔開始場所、穿孔方向および穿孔する孔の深さを、穿孔する岩盤に関連して決める。本発明では、穿孔すべき孔(2ないし9、9aないし11a)に対して孔タイプに固有の穿孔パラメータを決め、穿孔段階中、ドリルリグは、穿孔すべき各孔(2ないし9、9aないし11a)ごとに穿孔パラメータをその特定の孔の孔タイプに基づいて自動的に選択する。 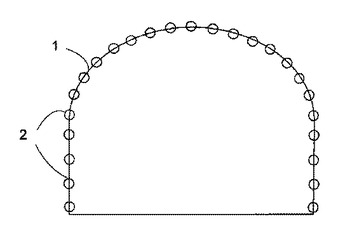 (もっと読む)
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法
【課題】既存の削岩機搭載台車に対し穿孔位置決め制御機能を持たせる。
【解決手段】ドリルジャンボ1に三次元スキャナー9を設置するとともに、コンピュータ2を設置し、コンピュータ2に予め、前記削岩機13及び/又はガイドシェル12の形状、寸法データを登録しておき、三次元スキャナー9により三次元点群データを取得し、コンピュータ2によって三次元モデルを生成するとともに、該三次元モデルと、予めコンピュータ2に登録された前記削岩機13及び/又はガイドシェル12の形状、寸法データとのパターンマッチングを行い、削岩機13及び/又はガイドシェル12を特定し、削岩機13及び/又はガイドシェル12の位置及び方向を把握する。また、削岩機13及び/又はガイドシェル12について三次元点群データの欠損がある場合、予め登録されている削岩機13及び/又はガイドシェル12の形状、寸法データに基づき、該欠損部分を補完する。
(もっと読む)
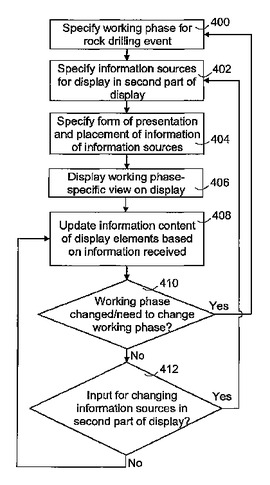
削岩装置用の適応ユーザインタフェース
本発明は、削岩装置を用いて行われる多段階削岩作業を制御する制御装置に関する。削岩装置またはその制御ユニットのディスプレイでは、第1の部分が、実質的に一定の情報源用に設定でき、第2の部分が、削岩状況に応じて切り換えられる情報源用に設定できて、それに関連した情報が前記削岩状況時に表示される、少なくとも1つの情報源に関して、削岩状況を特定するように、定義が制御装置にセットされる。削岩作業の作業段階を照合し(400)、前記定義に基づいて前記段階に適した情報源を選択する(402)。削岩段階の実行中に、少なくとも1つの選択した情報源に関連した情報を前記表示部分に表示する(406)。
 (もっと読む)
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法
【課題】ガイドシェル、ブームを作動させるサーボ機構を有しない、既存の削岩機搭載台車に対して、穿孔位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法
【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
1 - 15 / 15
[ Back to top ]