
Fターム[2D129CB07]の内容
Fターム[2D129CB07]に分類される特許
1 - 20 / 27
方向修正用削孔装置
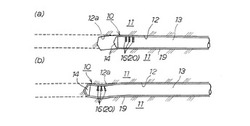
【課題】削孔機を用いてコンクリート構造物等に穿孔された孔に孔曲がりが生じた際に、生じた孔曲がりを簡易に修正することができる方向修正用削孔装置を提供する。
【解決手段】穿孔された孔12に挿入可能な推進ガイドパイプ13と、推進ガイドパイプ13の先端に回転自在に取り付けられた掘削ビット14と、先端部が掘削ビット14に連結されて掘削ビット14に回転力を伝えるフレキシブルシャフトとを含んで構成されており、且つ推進ガイドパイプ13の先端部分の周面に、周方向に延設するスリット16が、推進ガイドパイプ13の軸方向に間隔をおいて複数形成されている。生じた孔曲がり12aの曲がり方向とは反対側に、スリット16が形成された領域を配置した状態で、推進ガイドパイプ13を穿孔された孔12に挿入して、掘削ビット14を孔曲がり12aの曲がり方向と反対側に向けて掘削させることにより、孔曲がりを修正する。
(もっと読む)
杭打機

【課題】地盤改良と鋼管埋設とを選択して効率よく確実に作業することができる杭打機を提供する。
【解決手段】地盤改良作業と鋼管埋設作業とを選択可能な杭打機において、作業開始時に地盤改良と鋼管埋設とのいずれか一方の作業内容を選択する作業選択手段と、該作業選択手段で選択した作業内容に対応した回転駆動装置の最大トルクを設定するトルク設定手段と、回転駆動装置のトルクを調整するトルク調整手段とを備え、該トルク調整手段は、該トルク調整手段の最大値が前記トルク設定手段で算出した最大トルクに設定される。
(もっと読む)
杭打機
【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
(もっと読む)
削岩リグおよびその位置決め方法
建設機械用安全装置
【課題】キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置を提供する。
【解決手段】キャリアユニット10に対する駆動ユニット18の現在位置を1個又は複数個の検出手段28,29で検出する。建設機械1の傾きに対し所与レベルの安全性を提供しつつ駆動ユニット18を動かせる可動範囲を、1個又は複数個の入力値に基づき、評価ユニット22が1個又は複数個定める。表示手段20が、キャリアユニット10に対する駆動ユニット18の現在位置と併せ、その可動範囲を表示する。
(もっと読む)
調節範囲を決定するコンピュータユニットを有する建設機械及びその建設機械を動作させる方法
【課題】傾倒に対する安全度に関わる信頼性が高く、作業半径が大きくい建設機械を提供する。
【解決手段】搬送ユニット10と、搬送ユニット10に対する調節が可能な駆動ユニット18と、建設機械1の状態データを検出する、少なくとも一つの検出手段51〜64と、コンピュータユニット23とを有し、建設機械1の傾倒に対する所定の安全度で駆動ユニット18を調節できる、駆動ユニット18の調節範囲の少なくとも一つを、検出された状態データに基づいて、コンピュータユニット23を利用して決定する。
(もっと読む)
破砕ハンマの使用率測定方法、破砕ハンマおよび測定装置
本発明は、破砕ハンマの使用率測定方法および測定装置、ならびに削岩装置に関する。測定装置(10)は、衝撃装置(4)の動作によって生じる物理現象を測定するセンサ(11)を含む。測定結果を処理し、これを使って衝撃装置の動作の開始時間と終了時間を測定する。タイミング装置(61)を用いて、衝撃サイクル(IC)の期間長を測定し、これを時間カウンタ(62)へ加算することができる。時間カウンタへ累積的に加算した衝撃サイクルの期間長は破砕ハンマの総衝撃時間を示す。衝撃サイクル間で衝撃中断(IP)もモニタし、所定の時間限界値(tstop2)より短い中断は使用率の一部として考慮される。 (もっと読む)
地盤施工機およびその工具駆動制御方法
【課題】複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供する。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
(もっと読む)
削岩リグ制御システム及び制御方法
削岩機の送りモータ(2)、打撃装置(4)及び回転モータ(3)である消費体への圧力流体供給を制御する油圧流体制御システム(1)であって、前記システムが、各消費体用の調整バルブ(6,7,8)を有し、調整バルブと各消費体との間に流体導管が設けられ、前記システムが、流体導管の少なくとも一つの接続及び遮断用の少なくとも一つの電気制御式補助バルブ(14)を備えた電子制御式補助制御ユニット(11)と、削岩機の少なくとも一つの部材に関する有効流体パラメータ値を感知し、かつ、センサ信号をセンサ入力信号is値として補助制御ユニットに送るための少なくとも一つのセンサと、前記センサ入力信号is値を受信するための少なくとも一つのパラメータセンサ入力信号入力部(S1−S5,I1−I5)と、各補助バルブの信号制御用の少なくとも一つの制御信号出力部(V1−V6)とを有する処理装置(12)とを備え、前記処理装置(12)が、前記センサ入力信号is値をパラメータshould値と比較し、比較結果に対する応答として少なくとも一つの補助バルブに制御信号を出力し、前記少なくとも一つの補助バルブに関する流体導管内の流体フローを調整するように構成されている。本発明は、削岩リグ及び方法にも関する。 (もっと読む)
孔内データ収集システム
【課題】伝送速度及び伝送可能深度を十分大きくでき、そのため孔内データをリアルタイムで伝送することができ、しかもシステムを安価に構築でき、システム維持も容易に行えるようにする。
【解決手段】孔内データを得るためのセンサー及び関連機器を搭載した計測ゾンデ10と、計測ゾンデを吊り下げるワイヤー12と、ウインチ装置14と、地上観測装置16を具備し、ワイヤーにより計測ゾンデを孔内に挿入し、計測した孔内データを地上観測装置で収集するシステムである。ワイヤーは、長手方向に複数箇所に分散配置したロータリージョイント18を介して複数の多芯ケーブル20を機械的並びに電気的に順次接続した1本のケーブル構造体であり、ロータリージョイントは、ロータリー式の信号カプラを内蔵し、上部ケーブルと下部ケーブルとの間での相対回転が許容され、且つ多芯ケーブルの抗張力と同等以上の引張耐力を有し、電気信号の伝送を可能とする。
(もっと読む)
ふれまわり防止ドリルビット、坑井現場システム及びその使用方法
本発明は、ふれまわり防止ドリルビット、坑井現場システム及びその使用方法を提供する。本発明の一実施形態では、ドリルビット(105)であって、ドリルストリングと流体連通状態にある内部キャビティ及びドリルビットの外部に設けられた第1の計器パッド(206a)を有するドリルビットが提供される。第1の計器パッドは、上記内部キャビティと流体連通状態にある第1のオリフィス(212)を有する。ドリルビットは、流体が第1のオリフィスから連続して流出するように構成されている。 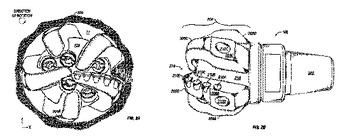 (もっと読む)
(もっと読む)
自己安定化且つふれまわり防止ドリルビット、坑底組立体及びシステム並びにその使用方法
本発明は、自動安定化且つふれまわり防止ドリルビット105及び坑底組立体並びにその使用システムを提供する。本発明の一実施形態では、ドリルビットであって、ドリルストリングと流体連通状態にある内部キャビティ及びドリルビットの外部に設けられた複数個の計器パッド(206a)を有するドリルビットが提供される。第1の計器パッドは、内部キャビティと流体連通状態にある第1のオリフィス(212)を有する。ドリルビットは、流体が第1のオリフィスから連続して流出するよう構成されている。 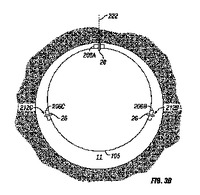 (もっと読む)
(もっと読む)
削岩リグにおける方法および装置
削岩リグ(1)に削岩機(6)が設けられ、削岩機は、衝撃装置(4)と、送り装置(9)と、削岩用ドリルビット(8)を端部に備えたツール(7)とを有する。衝撃装置は応力波をツールに対して発生し、ここからさらに、被掘削岩盤に対して発生するよう配設されている。掘削中、ツールに対して発生した圧縮応力波(σi)の少なくとも一部は、岩盤から反射されて応力波(σr)としてツールへ戻る。本方法では、岩盤から反射されてツールへ戻る応力波(σr)の運動量(Pr)を求め、衝撃装置の作動および/または送り装置の作動を運動量に基づいて調節する。 (もっと読む)
掘削排土装置及びその方法
【課題】掘削した土砂を保持し、保持した土砂を容易に排出(排土)することで作業効率の向上を図る。
【解決手段】内管1に、土砂保持装置20を収納し内管1を回転させるとともに、内管1に設けられた掘削用噴射管6へ流体を送り、掘削用噴射ノズル3より噴射し土砂を掘削し、掘削完了後、掘削用噴射ノズル3の流体の噴射を止め、内管1に設けられた切断用噴射管7へ流体を送り、切断用噴射ノズル4より流体を噴射し、土砂保持装置20の軸方向を横断する方向に土砂保持装置20内の土砂を切断し、内管1に設けられた注入管28へ流体を送り、注入パイプ26より流体を膨張体21へ送り膨張体21を膨張させ、膨張体21により切断用噴射ノズル4からの流体の噴射で切断した土砂を保持し、内管1を地上側へ引き上げ、内管1と土砂保持装置20を分離可能な状態にし、内管1内の土砂を土砂保持装置と共に排土する掘削排土装置及びその方法を提供する。
(もっと読む)
既製杭建込み施工管理装置
【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
削岩リグ制御方法及び装置
本発明に係るドリルリグの制御方法及び制御装置は、少なくとも一つの送りビーム(3)を備えたキャリア車両を有し、前記送りビーム(3)上に、削岩機(2)が前後に移動可能に設けられた掘削リグ(1)の制御方法及び装置であって、リグのパラメータが制御ユニット(6)によって設定され、複数の動作モード(M1〜M6)の各々が、リグの異なる動作パラメータに対する特別な動作設定を含む。リグの動作が掘削を実行すべき岩盤の特別な種類に関連するように各動作モード(M1〜M6)が選択可能であり、各動作モード(M1〜M6)は実施されている岩盤の種類に適合させる動作設定を含む。本発明は、ドリルリグにも関する。 (もっと読む)
杭施工用掘削装置および杭の施工方法
【課題】掘削土を連続的に排土することで掘削作業を効率的に実施し施工時間を短縮することができる杭施工用掘削装置および杭の施工方法を提供すること。
【解決手段】駆動部によって回転、圧入される外側鋼管2および内側鋼管4で地盤Gを掘削し、掘削した掘削土をスクリュー3B(排土手段)で地上に搬送して排出することで、外側鋼管2および内側鋼管4の掘削用ビット2Aによる掘削を連続的に実施でき、掘削作業を効率的に実施して施工時間が短縮化できる。さらに、内側鋼管4の内周面に設けた粉砕ビット(内部粉砕手段)で内側鋼管4内部に取り込んだ土塊を粉砕することで、コア状の土塊を細かくしてスクリュー3Bによる排土が容易になり、さらに掘削作業を高速化することができる。
(もっと読む)
N値検出方法およびN値検出装置並びに杭穴掘削装置
【課題】 現在主流となっている油圧モーターを駆動源とする杭穴掘削装置について、地盤の掘削作業時にリアルタイムに正確なN値を検出することができないという問題がある。また、地盤中の岩などの掘削不能な障害物に当ると掘削バケットの方向が曲げられ、その結果杭穴が斜めに形成されるという問題がある。
【解決手段】 地盤を掘削する掘削バケットの駆動源である油圧モーターの入力圧力値と油圧モーターの回転周期の値とから掘削している地盤のN値を検出する。また、掘削作業中にN値をリアルタイムに監視することにより、地盤中の障害物や硬い地層などを検知し、杭穴が斜めに形成されることを防ぐ。
(もっと読む)
杭施工機
【課題】杭径や地盤性状が多様に変化する場合においても、その構成機器や杭を損傷させることなく品質に優れた杭基礎施工を実現できる杭施工機を提供すること。
【解決手段】その回転数とトルクの組合せを2パターン以上有した可変容量型の油圧モータ10,20を2基備え、かつ該油圧モータ10,20の回転を減速する減速機30を備えたオーガ駆動装置4をベースマシン1のリーダに沿って昇降自在に装備してなる杭施工機100であって、油圧モータ10,20は、トルク性能および回転性能からなる出力性能がそれぞれに異なる油圧モータであり、各油圧モータ10,20の有する出力性能と、各油圧モータ10,20の駆動の有無と、から規定されるオーガ駆動装置4の出力パターンを格納する格納手段と、該格納手段における出力パターンを自動選択してオーガ駆動装置4を駆動させる選択手段と、を具備している。
(もっと読む)
1 - 20 / 27
[ Back to top ]