
Fターム[2D129CB11]の内容
Fターム[2D129CB11]に分類される特許
1 - 20 / 35
削孔装置及びこれを用いた注入管の敷設方法
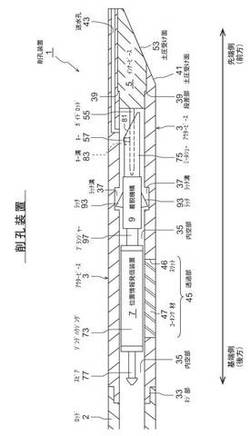
【課題】土質に左右されることなく計画線形に沿って正確に削孔できるようにする。
【解決手段】削孔装置1は、ロッドに連結されるアウターピース3と、アウターピース内に押し出し可能に収容されるインナーピース5と、ゾンデ・ロケータ方式による位置検知に用いられる位置情報発信装置7を有する。位置情報発信装置は、該発信装置の削孔途中での取外しと再装着を可能にする着脱機構9を装備し、内部にゾンデや傾斜計を格納している。削孔途中でパーカッションを使用する場合には、着脱機構のラッチ93を解除して位置情報発信装置だけを一時的に回収する。これにより、位置情報発信装置を衝撃から確実に保護できる状態で、削孔装置の先端に打撃力を与えることができる。パーカッションが終了したら、位置情報発信装置を元の位置に押し戻しアウターピースに再装着する。これによりゾンデ・ロケータ方式による正確な位置検知を再開できる。
(もっと読む)
方向修正用削孔装置

【課題】削孔機を用いてコンクリート構造物等に穿孔された孔に孔曲がりが生じた際に、生じた孔曲がりを簡易に修正することができる方向修正用削孔装置を提供する。
【解決手段】穿孔された孔12に挿入可能な推進ガイドパイプ13と、推進ガイドパイプ13の先端に回転自在に取り付けられた掘削ビット14と、先端部が掘削ビット14に連結されて掘削ビット14に回転力を伝えるフレキシブルシャフトとを含んで構成されており、且つ推進ガイドパイプ13の先端部分の周面に、周方向に延設するスリット16が、推進ガイドパイプ13の軸方向に間隔をおいて複数形成されている。生じた孔曲がり12aの曲がり方向とは反対側に、スリット16が形成された領域を配置した状態で、推進ガイドパイプ13を穿孔された孔12に挿入して、掘削ビット14を孔曲がり12aの曲がり方向と反対側に向けて掘削させることにより、孔曲がりを修正する。
(もっと読む)
海底鉱床掘削機
【課題】従来の掘削機と回収機の両方を積み込むような広い甲板を有する大型の作業船を必要とすることなく、掘削機を積載可能な程度の船により掘削、集積作業を可能にする海底鉱床掘削機を提供する。
【解決手段】本発明である海底鉱床掘削機は、左右一対のクローラが備えられている本体フレームの先方に海底鉱床を掘削する掘削装置が掘削ブームを介して上下左右に揺動可能に備えられている海底および海底鉱床を走行可能とした海底鉱床掘削機において、本体フレームに備えた掘削装置が取り外し可能であるとともに掘削ブームに海底に散在する掘削された海底鉱物の鉱砕を前記本体フレームに設置された集積槽に送入するための集積装置を取り付け可能とした。
(もっと読む)
杭打機
【課題】回転駆動装置の形式、リーダの形式や長さ、施工部材の変更などにも容易に対応することができる制御手段を備えた杭打機を提供する。
【解決手段】リーダ16に沿って昇降する回転駆動装置18によって施工部材を回転させながら地中に圧入する杭打機11において、リーダにおける回転駆動装置の昇降位置を検出する位置検出手段と、回転駆動装置の形式、リーダの形式及び長さ、施工部材の形式をあらかじめ設定する作業条件設定手段と、位置検出手段で検出した回転駆動装置の昇降位置、作業条件設定手段に設定された作業条件及び回転駆動装置に設けられた駆動源の形式に基づいて回転駆動装置から施工部材に与えるトルクの制限値を演算する制御手段とを備えている。
(もっと読む)
杭建込み施工管理装置およびプログラム
【課題】施工品質を向上させることのできる杭建込み施工管理装置およびプログラムを得る。
【解決手段】杭建込み施工管理装置30により、管理対象とする杭の少なくとも径および長さが含まれる杭仕様情報、および杭を建込む地盤の土質を示す土質情報を取得し、取得した杭仕様情報および土質情報に基づいて、掘削機20により、建込み孔を掘削により造成した後に当該建込み孔に杭を建込む施工を行う際の、施工時間の経過に伴う建込み孔の造成時の掘削ヘッドの先端位置および杭の建込み時の当該杭の先端位置の変化を示す施工サイクルタイム情報を導出し、杭建込み施工支援装置40により、施工サイクルタイム情報に基づいて、当該施工サイクルタイム情報により示される施工時間の経過を一方の軸とし、掘削ヘッドの先端位置および杭の先端位置を他方の軸としたグラフを示すグラフ情報を作成し、作成したグラフ情報により示されるグラフを表示する。
(もっと読む)
削孔管の先端位置測定方法および先端位置測定システム
【課題】小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置の測定が可能な削孔管の先端位置測定方法および先端位置測定システムの提供。
【解決手段】地中を削孔しながら推進する削孔管Cの先端位置を測定する方法であって、前記削孔管Cの推進方向後端側に受信器30を設けると共に、前記削孔管Cの先端が推進する地中の所定の位置に複数の発信器20を埋設しておき、前記各発信器20から前記削孔管Cの先端方向に測定用音波を発信して当該削孔管Cを伝播する各測定用音波を前記受信器30によって受信した後、受信した各測定用音波を解析して前記削孔管Cの先端位置を測定する。これによって、小径の削孔管や地上構造物がある場所などであっても正確かつ容易にその先端位置を測定できる。
(もっと読む)
削孔機における先端ビットの偏位方向検出装置及び削孔方法
【課題】 削孔管の先端に取り付けた先端ビットの向きを正確に検出することにより、精度の高い削孔を行うことが可能な、削孔機における先端ビットの偏位方向検出装置及び削孔方法を提供する。
【解決手段】 削孔管20の先端部に設けた先端ビット40に取り付けた固定磁石部60と、固定磁石部60に対向するように、削孔管20内に挿入するジャイロスコープ30の先端部に取り付けられ、当該ジャイロスコープ30の中心軸方向を回転軸として回転可能であり、固定磁石部60との間に生じる吸引力及び反発力により、固定磁石部60に対して所定位置に停止する回転磁石部70と、回転磁石部70の回転角度を計測する回転角度計測器80と、を備える。
(もっと読む)
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。 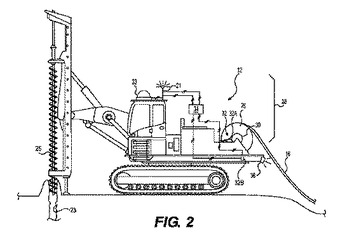 (もっと読む)
(もっと読む)
削孔位置計測方法およびシステム
【課題】計測誤差を小さくして削孔位置を高い精度で計測できる削孔位置計測方法およびシステムを提供する。
【解決手段】削孔管9の地上に突出した端部に延長管10を連結し、削孔管9および延長管10の内部でジャイロスコープ3を移動させつつ取得したジャイロスコープ3の検知データおよびエンコーダ4により検知したジャイロスコープ3の移動長さのデータに基づいて、制御装置5によってジャイロスコープ3の移動軌跡を算出するとともに、延長管10において離間する2つの基準位置Pa、Pbでのジャイロスコープ3の3次元座標を基準位置座標検知手段11により検知し、ジャイロスコープ3の移動軌跡のデータと基準位置座標検知手段11により検知した2つの3次元座標のデータに基づいて制御装置5により削孔位置を算出してモニター6に表示する。
(もっと読む)
削孔ロッドの先端傾斜板の回転角検出装置および回転角検出方法
【課題】簡略な構成で削孔ロッドの先端傾斜板の回転角を検出する。
【解決手段】位置検出機能と回転角検出機能を備えたプローブ50の先端に誘導治具60を固定し、自在ボーリングの削孔ロッド12内に挿入する。削孔ロッド12の先端12Aには先端ユニット20が装着され、先端ユニット20の円筒管21の先端に、削孔方向を決める先端傾斜板40が取り付けられている。誘導治具60の外周部には円筒ハウジング61の外周面より突没自在の可動ガイド部材70が装備されており、この可動ガイド部材70が、円筒管21の内壁面22に設けられたガイド手段30(全周解放溝32、誘導溝33、位置決め溝34)に案内されることで、誘導治具60が挿入されながら回転して、最終的に可動ガイド部材70が位置決め溝34に嵌まることで、プローブ50が先端傾斜板40と円周方向に固定される。これにより、プローブ50により先端傾斜板40の回転角が検出される。
(もっと読む)
削岩機の制御方法及び構造
本発明に係る削岩機を用いて岩の掘削をする時に少なくとも一つの掘削パラメータを制御する方法及び構造は、衝撃波発生装置を介して発生される衝撃力によって岩に対して作用する工具に衝撃波を誘導するように構成された衝撃発生装置を備えている。この構造は、また、回転圧力を介して発生される回転によって衝撃装置にトルクを供給するように構成された回転発生装置と、減衰チャンバ内の減衰圧力を介して削岩機の岩との接触を少なくとも部分的に調整するように構成された加圧可能な減衰チャンバとを備え、ここで、衝撃波発生圧力は、回転圧力に応じて調整される。この構造は、減衰圧力又は送り圧力を表す第一パラメータ値を決定し、ドリルビットの回転圧力を表す第二パラメータ値を決定し、前記第二パラメータ値と回転圧力基準値との間の偏差を決定し、前記偏差に依存するパラメータ基準値を決定し、前記偏差及び前記パラメータ基準値の関数に基づいて衝撃圧力を調整する。 (もっと読む)
ガス回収システム
【課題】ガスハイドレート層内にて移動回収機を移動させながらガスハイドレートを効率良く回収することが可能なガス回収システムを提供する。
【解決手段】地中のガスハイドレート層CからガスハイドレートDを回収するガス回収システムであって、ガスハイドレート層Cにて移動しながらガスハイドレートDを取り込む移動回収機4を備え、移動回収機4には、燃料ガスと酸化ガスの電気化学反応によって発電する燃料電池71が動力源として搭載されている。
(もっと読む)
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。 (もっと読む)
水底地盤面下の埋設構造物の撤去工法
【課題】水底地盤面下に埋設されている埋設構造物を水面上からの作業により効率的に撤去する。
【解決手段】撤去対象の埋設構造物(たとえば管渠1)の全体あるいはその一部を内側に取り込み可能な大きさのケーシング2を駆動してその先端部を水底地盤に対して貫入可能なケーシングドライバーを台船に搭載し、ケーシングドライバーを埋設構造物の上方位置に位置決めした状態で台船を水面上に配置する。ケーシングドライバーによりケーシング2を回転させつつその先端部を水底地盤面に貫入させて埋設構造物の全体あるいはその一部を取り込み、ケーシング内において水底地盤を掘削するとともにケーシング内に取り込んだ埋設構造物をケーシング内から引き上げて撤去した後、ケーシングを引き上げる。
(もっと読む)
溝掘削装置
【課題】掘削用のビット付きの掘削部材を埋設することなく再利用を可能とし、不経済の問題を解消した溝掘削装置を提供する。
【解決手段】掘削機16にセットされる管状のケーシング20と、ケーシング20の下端部に着脱可能に取付けられ、下端に掘削用のビット21cが設けられた掘削部材21とを備え、掘削機16によりケーシング20を下降させつつ回転させ、掘削部材21により地盤にリング溝22を形成する。
(もっと読む)
ドリルパイプ用ハンドリング装置
本パイプ用ハンドリング装置は、ドリルパイプの位置決めおよび保持に使用される。ドリルパイプに対する少なくともひとつの保持装置は水平方向および垂直方向のいずれにも位置決め可能に配置され、かつ該パイプに対する制御式クランプ装置を具備している。取り扱うべきパイプに対するセンタリング装置は、前記保持装置の隣に配置される。 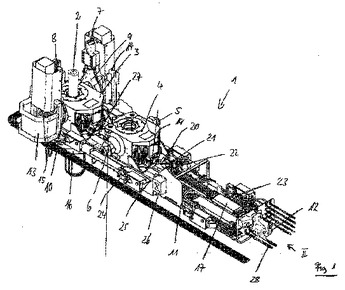 (もっと読む)
(もっと読む)
掘削機械、掘削方法、及び掘削プログラム
【課題】1回の掘削ステップで、決められた土砂回収量を掘削できる掘削機械、掘削方法、及び掘削プログラムを得る。
【解決手段】拡径掘削バケット22の深度は深度検出部17で検出され、側壁板30の拡径量は変位量センサ73で検出される。シーケンサA27は、拡径掘削バケット22の1回の掘削量が土砂回収バケット96の設定回収量と等しくなるように、深度と掘拡径量を算出し、掘削可能領域を決定してモニタ35に表示する。操作者は、表示された掘削可能領域に合わせて掘削を行う。これにより、中間拡径部56における1回の掘削時の土砂回収量が土砂回収バケット96の設定回収量となるので、回収しきれない土砂が縦孔20の底部に落下するのを防ぐことができる。また、1回の掘削における掘削量を土砂回収バケット96の最大回収可能量とすることにより、拡径掘削バケット22を地上へ引き上げる回数が必要最小限の回数となり、施工効率が上がる。
(もっと読む)
ボーリング削孔装置の先端位置検出システムおよび削孔管
【課題】単純な構造で、地上障害物に影響されることなく効率的に削孔することができるボーリング削孔装置の先端位置検出システムおよび削孔管を提供する。
【解決手段】ボーリング削孔装置1の削孔管10の先端位置を検出する先端位置検出システムにおいて、削孔管10内に、この削孔管10の先端位置を検出する位置測定装置30を設けるとともに、この位置測定装置30で測定した位置データを無線信号に変換する無線信号発生装置50を設け、削孔管10の胴部12の一部に導線72を巻きつけてコイル70を形成し、このコイル70によって無線信号発生装置50で変換された無線信号を送信するように構成し、地上に、無線信号を受信するための受信装置90を設けた。
(もっと読む)
掘削装置
【課題】地中に入り込む部分にセンサなどを設けずに、拡大翼の位置を地上で知ること。
【解決手段】掘削装置は、拡大翼により拡大堀りする掘削装置であり、筒状のアウターロッド11と、このアウターロッドを回転させる回転駆動装置3と、前記アウターロッドに挿入されるインナーロッド13と、このインナーロッドの上端部を回転可能、かつ、上下動不能に支持するインナーロッド支持体17と、このインナーロッド支持体を上下に昇降させる昇降装置21と、前記アウターロッドに対するインナーロッドの相対的な上下動と連動し、アウターロッドから張り出して拡大堀りする拡大位置と、この拡大位置よりもアウターロッド側に引っ込む引込位置との間を移動する前記拡大翼とを備えている。
(もっと読む)
掘削機の位置計測方法
【課題】作業者によることなく、常に一定の計測精度が得られる掘削機の位置計測方法を提供する。
【解決手段】掘削機のケリーバー5を用いて地中連続壁を構築する際に、ケリーバー5の位置を計測するための掘削機の位置計測方法であって、ケリーバー5の設計位置2の近傍にガイド定規3Aを設置し、ケリーバー5の掘削方向前方側の第1面6とこの第1面6に隣接するガイド定規3Aと反対側の第2面7との間に曲尺4を当てて、曲尺4とガイド定規3Aとの第1交点Bを求め、ケリーバー5の掘削方向後方側の第3面8とこの第3面8に隣接する第2面7との間に曲尺4を当てて、曲尺4とガイド定規3Aとの第2交点Cを求め、この求めた交点B、Cを基にしてケリーバー5の位置を計測する。
(もっと読む)
1 - 20 / 35
[ Back to top ]