
Fターム[2D129CB15]の内容
Fターム[2D129CB15]に分類される特許
1 - 20 / 29
調節範囲を決定するコンピュータユニットを有する建設機械及びその建設機械を動作させる方法
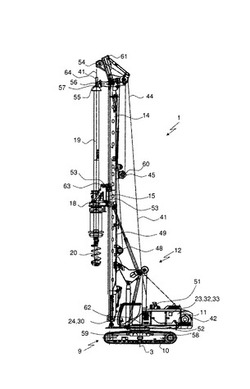
【課題】傾倒に対する安全度に関わる信頼性が高く、作業半径が大きくい建設機械を提供する。
【解決手段】搬送ユニット10と、搬送ユニット10に対する調節が可能な駆動ユニット18と、建設機械1の状態データを検出する、少なくとも一つの検出手段51〜64と、コンピュータユニット23とを有し、建設機械1の傾倒に対する所定の安全度で駆動ユニット18を調節できる、駆動ユニット18の調節範囲の少なくとも一つを、検出された状態データに基づいて、コンピュータユニット23を利用して決定する。
(もっと読む)
ハンマーグラブ制御システム

【課題】ハンマーグラブの回転を制御すて、油圧配管チューブ等の捩じれ破損を防止するハンマーグラブ制御システムを提供する。
【解決手段】筒状基枠10に、地盤中に打ち込まれるケーシングCの中心部側から半径方向に進退移動可能で、ケーシングC内周面に圧接し筒状基枠10をケーシングCと一体化するプッシャー31を有するスタビライザー13を一体的に設け、スタビライザー13に一体的に連結する内軸体14aと回転可能に外嵌された外筒体14bとからなるスイベル機構14を有し、スイベル機構14の外筒体14bに吊り下げ接続部5を設けたハンマーグラブH1において、伝動機構を介してスイベル機構14の外筒体14bを回転駆動するモータ3と、ハンマーグラブH1の回転時に発生する外筒体14bの周方向のねじれ角を補正し、モータ3の回転を制御して外筒体14bをねじれ前の位置に復帰させるモータ制御装置4を有する。
(もっと読む)
地盤施工機およびその工具駆動制御方法
【課題】複数の変速段から最適な変速段を自動的に選択して工具を安定的に回転駆動することのできる地盤施工機およびその工具駆動制御方法を提供する。
【解決手段】回転駆動される工具と、可変容量の油圧モータを複数備えた駆動部8と、油圧モータに供給される流体の供給側と排出側の圧力差を検出するための検出器86,87と、駆動部の複数の変速段のいずれかを自動的に選択して駆動部を駆動制御する駆動制御部80とを有し、駆動制御部は、圧力差によって変速段の選択を行うものであり、変速段移行のための圧力差の基準値と基準時間とがそれぞれの変速段移行に対して設定されており、圧力差が変速段を低速側に移行するための基準値以上である状態が基準時間以上連続した場合に、変速段を低速側に移行するものであり、圧力差が変速段を高速側に移行するための基準値以下である状態が基準時間以上連続した場合に、変速段を高速側に移行するものである。
(もっと読む)
拡大翼を備えた掘削装置及び掘削方法
【課題】 拡大穴を掘削するときの掘削回数を自動的に設定する。
【解決手段】
下端に掘削刃6aと拡大翼7を備えた掘削ロッド5と、掘削ロッド5を駆動するオーガ駆動装置3と、前記掘削刃3aによる拡大穴掘削区域の掘削時における前記駆動手段の電動機4の負荷電流を測定する手段と、を有し、前記測定した電流値に基づき掘削刃6aの掘削力を求め、それに所定の低減率を付して拡大翼7による掘削力を算出し、前記拡大翼7の掘削力に基づき拡大穴の掘削回数を算出する。 前記掘削回数に基づき前記拡大翼7の拡開量を算出し、前記拡大翼7の拡開量に基づき前記拡大翼を拡開制御する。
(もっと読む)
掘削装置および土木施工方法
【課題】土木施工を行うための掘削装置において、簡便な構成でドリルストリング内部への建設材料の供給を高い信頼性で行う。
【解決手段】ドリルストリング1を回転式に駆動する掘削駆動部10と、建設材料を建設材料用ホース6からドリルストリング1の内部へと送り出すための回転フィードスルー20を備え、回転フィードスルー20は、建設材料用ホース6のための第一の配管連結部21と、第一の配管連結部21に関して回転自在なドリルストリング1のための第二の配管連結部22を有し、第二の配管連結部22を第一の配管連結部21に関して能動的に回転させるための回転装置30を含む。
(もっと読む)
掘削装置
【課題】機構がシンプルで安価であり、更に軽量でありながら単体で安定した掘削性能を発揮する、新規且つ有用な掘削装置を提供する。
【解決手段】ドリルビットが回転することによって生じる回転反力を相殺するために、ドリルビットの進行方向の反対側に、ドリルビットの回転方向とは逆方向に回転駆動される螺旋羽根を設けた。ドリルビットを回転駆動するドリルモータと、螺旋羽根を回転駆動する螺旋モータは、共通の筐体であるケースに収められ、このケースを通じて回転反力同士が相殺される。
(もっと読む)
削孔ロッドの先端傾斜板の回転角検出装置および回転角検出方法
【課題】簡略な構成で削孔ロッドの先端傾斜板の回転角を検出する。
【解決手段】位置検出機能と回転角検出機能を備えたプローブ50の先端に誘導治具60を固定し、自在ボーリングの削孔ロッド12内に挿入する。削孔ロッド12の先端12Aには先端ユニット20が装着され、先端ユニット20の円筒管21の先端に、削孔方向を決める先端傾斜板40が取り付けられている。誘導治具60の外周部には円筒ハウジング61の外周面より突没自在の可動ガイド部材70が装備されており、この可動ガイド部材70が、円筒管21の内壁面22に設けられたガイド手段30(全周解放溝32、誘導溝33、位置決め溝34)に案内されることで、誘導治具60が挿入されながら回転して、最終的に可動ガイド部材70が位置決め溝34に嵌まることで、プローブ50が先端傾斜板40と円周方向に固定される。これにより、プローブ50により先端傾斜板40の回転角が検出される。
(もっと読む)
削岩制御方法および装置
削岩機(1)に属する打撃装置(7)による削岩を制御して、給送モータ(3)により工具を岩盤へ押し付けると同時に工具を回転モータにより回転させることによって工具(9)を介して岩盤へ応力波を送り、これによって、最大送り力を決め、圧力媒体を給送モータ(3)および回転モータ(8)へ供給し、送り力を穿孔条件に従って制御する方法および装置。送り力は送り速度および回転トルクに基づいて制御される。本装置は送りを制御する負荷制御弁を有する。 (もっと読む)
削岩リグ制御システム及び制御方法
削岩機の送りモータ(2)、打撃装置(4)及び回転モータ(3)である消費体への圧力流体供給を制御する油圧流体制御システム(1)であって、前記システムが、各消費体用の調整バルブ(6,7,8)を有し、調整バルブと各消費体との間に流体導管が設けられ、前記システムが、流体導管の少なくとも一つの接続及び遮断用の少なくとも一つの電気制御式補助バルブ(14)を備えた電子制御式補助制御ユニット(11)と、削岩機の少なくとも一つの部材に関する有効流体パラメータ値を感知し、かつ、センサ信号をセンサ入力信号is値として補助制御ユニットに送るための少なくとも一つのセンサと、前記センサ入力信号is値を受信するための少なくとも一つのパラメータセンサ入力信号入力部(S1−S5,I1−I5)と、各補助バルブの信号制御用の少なくとも一つの制御信号出力部(V1−V6)とを有する処理装置(12)とを備え、前記処理装置(12)が、前記センサ入力信号is値をパラメータshould値と比較し、比較結果に対する応答として少なくとも一つの補助バルブに制御信号を出力し、前記少なくとも一つの補助バルブに関する流体導管内の流体フローを調整するように構成されている。本発明は、削岩リグ及び方法にも関する。 (もっと読む)
削岩機の制御方法及び構造
本発明に係る削岩機を用いて岩の掘削をする時に少なくとも一つの掘削パラメータを制御する方法及び構造は、衝撃波発生装置を介して発生される衝撃力によって岩に対して作用する工具に衝撃波を誘導するように構成された衝撃発生装置を備えている。この構造は、また、回転圧力を介して発生される回転によって衝撃装置にトルクを供給するように構成された回転発生装置と、減衰チャンバ内の減衰圧力を介して削岩機の岩との接触を少なくとも部分的に調整するように構成された加圧可能な減衰チャンバとを備え、ここで、衝撃波発生圧力は、回転圧力に応じて調整される。この構造は、減衰圧力又は送り圧力を表す第一パラメータ値を決定し、ドリルビットの回転圧力を表す第二パラメータ値を決定し、前記第二パラメータ値と回転圧力基準値との間の偏差を決定し、前記偏差に依存するパラメータ基準値を決定し、前記偏差及び前記パラメータ基準値の関数に基づいて衝撃圧力を調整する。 (もっと読む)
削岩リグにおける方法および装置
削岩リグ(1)に削岩機(6)が設けられ、削岩機は、衝撃装置(4)と、送り装置(9)と、削岩用ドリルビット(8)を端部に備えたツール(7)とを有する。衝撃装置は応力波をツールに対して発生し、ここからさらに、被掘削岩盤に対して発生するよう配設されている。掘削中、ツールに対して発生した圧縮応力波(σi)の少なくとも一部は、岩盤から反射されて応力波(σr)としてツールへ戻る。本方法では、岩盤から反射されてツールへ戻る応力波(σr)の運動量(Pr)を求め、衝撃装置の作動および/または送り装置の作動を運動量に基づいて調節する。 (もっと読む)
既製杭建込み施工管理装置
【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
自律型掘削装置
【課題】従来の掘削装置の問題点を解決した新たな自律型掘削装置を提供する。
【解決手段】自律型掘削装置の本体下部101は、円柱と下端部の円錐とを組み合わせた形状であり、その外周には螺旋状のブレード102が右ねじ形状に設けられている。本体下部101の内部にはホイール103が設けられており、その軸104はベアリング105、106によって回転自在に支持されている。ホイール103の上部には、モータ108が本体下部101に固定して設けられ、その出力軸は軸104と同軸に接続されている。したがって、モータ108は、ホイール103を本体下部101に対して回転させることができる。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
アースドリル
【課題】拡底孔を掘削中の拡底翼の開度を簡単な構造で確実に知ることが可能な拡底翼開度検出手段を備えたアースドリルを提供する。
【解決手段】ケリーバ駆動装置19の下部に設けられてケリーバ17が昇降可能に挿通された状態でケリーバと一体に回転する回転テーブル20に、油圧モータにて駆動されるケーブルリール37を設け、該ケーブルリール37に巻回されたケーブル34の先端を、拡底バケット21の拡底翼25を拡縮作動するスライダ28に接続するとともに、ケーブルリール37の回転をロータリーエンコーダで検出してケーブルの移動量を検出することによって拡底翼の開度を算出する。
(もっと読む)
掘削機械、掘削方法、及び掘削プログラム
【課題】1回の掘削ステップで、決められた土砂回収量を掘削できる掘削機械、掘削方法、及び掘削プログラムを得る。
【解決手段】拡径掘削バケット22の深度は深度検出部17で検出され、側壁板30の拡径量は変位量センサ73で検出される。シーケンサA27は、拡径掘削バケット22の1回の掘削量が土砂回収バケット96の設定回収量と等しくなるように、深度と掘拡径量を算出し、掘削可能領域を決定してモニタ35に表示する。操作者は、表示された掘削可能領域に合わせて掘削を行う。これにより、中間拡径部56における1回の掘削時の土砂回収量が土砂回収バケット96の設定回収量となるので、回収しきれない土砂が縦孔20の底部に落下するのを防ぐことができる。また、1回の掘削における掘削量を土砂回収バケット96の最大回収可能量とすることにより、拡径掘削バケット22を地上へ引き上げる回数が必要最小限の回数となり、施工効率が上がる。
(もっと読む)
削岩リグ制御方法及び装置
本発明に係るドリルリグの制御方法及び制御装置は、少なくとも一つの送りビーム(3)を備えたキャリア車両を有し、前記送りビーム(3)上に、削岩機(2)が前後に移動可能に設けられた掘削リグ(1)の制御方法及び装置であって、リグのパラメータが制御ユニット(6)によって設定され、複数の動作モード(M1〜M6)の各々が、リグの異なる動作パラメータに対する特別な動作設定を含む。リグの動作が掘削を実行すべき岩盤の特別な種類に関連するように各動作モード(M1〜M6)が選択可能であり、各動作モード(M1〜M6)は実施されている岩盤の種類に適合させる動作設定を含む。本発明は、ドリルリグにも関する。 (もっと読む)
N値検出方法およびN値検出装置並びに杭穴掘削装置
【課題】 現在主流となっている油圧モーターを駆動源とする杭穴掘削装置について、地盤の掘削作業時にリアルタイムに正確なN値を検出することができないという問題がある。また、地盤中の岩などの掘削不能な障害物に当ると掘削バケットの方向が曲げられ、その結果杭穴が斜めに形成されるという問題がある。
【解決手段】 地盤を掘削する掘削バケットの駆動源である油圧モーターの入力圧力値と油圧モーターの回転周期の値とから掘削している地盤のN値を検出する。また、掘削作業中にN値をリアルタイムに監視することにより、地盤中の障害物や硬い地層などを検知し、杭穴が斜めに形成されることを防ぐ。
(もっと読む)
杭施工機
【課題】杭径や地盤性状が多様に変化する場合においても、その構成機器や杭を損傷させることなく品質に優れた杭基礎施工を実現できる杭施工機を提供すること。
【解決手段】その回転数とトルクの組合せを2パターン以上有した可変容量型の油圧モータ10,20を2基備え、かつ該油圧モータ10,20の回転を減速する減速機30を備えたオーガ駆動装置4をベースマシン1のリーダに沿って昇降自在に装備してなる杭施工機100であって、油圧モータ10,20は、トルク性能および回転性能からなる出力性能がそれぞれに異なる油圧モータであり、各油圧モータ10,20の有する出力性能と、各油圧モータ10,20の駆動の有無と、から規定されるオーガ駆動装置4の出力パターンを格納する格納手段と、該格納手段における出力パターンを自動選択してオーガ駆動装置4を駆動させる選択手段と、を具備している。
(もっと読む)
方向制御削孔装置及びそれを用いた削孔方法
【課題】直線推進能力を損ねることなく曲線推進能力を発揮できる方向制御削孔装置及び削孔方法を提供する。
【解決手段】回転自在な外管2と、外管内に設けられ、独立して回転自在な内管3と、内管の先端部に自在継手4により接合された回転ロッド5と、回転ロッドの先端部に接続される削孔ビット6と、外管の先端部に対して回転自在に支持されると共に、内管の先端部を回転自在に支持し、さらに、回転ロッドの傾斜を許容し、かつ回転自在に支持する誘導管7と、を備えた削孔軸1を有し、回転ロッドを外管に対して直線状にした状態で、内管を回転させ、推進力を与えることにより、直線削孔がなされ、回転ロッドを外管に対して屈曲させた状態で、内管を回転させ、推進力を与えることにより、曲線削孔がなされ、回転ロッドを外管に対して屈曲させた状態で、内外管を回転させ、推進力を与えることにより、削孔径を拡大させた直線削孔がなされるように構成する。
(もっと読む)
1 - 20 / 29
[ Back to top ]