
Fターム[2E184GG02]の内容
人命救助 (2,557) | 避難誘導装置(HH検知又は制御も検討) (113) | 避難誘導装置の設置目的又は効果 (49) | 地区別管理又は時間経過による状況変化管理 (37)
Fターム[2E184GG02]の下位に属するFターム
誘導判断を行う(人の介在を含む) (11)
最適避難径路の選択 (21)
Fターム[2E184GG02]に分類される特許
1 - 5 / 5
防災設備
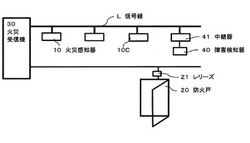
【課題】避難経路に置かれた障害物を検出すること。
【解決手段】建屋に設けられ、火災を検出する火災感知器と、該火災感知器からの火災信号を受信する火災受信機と、前記火災受信機からの制御信号によって閉じる防火戸とを有する防災設備において、前記火災感知器が接続される信号線に、防火戸の閉動作の障害となる障害物の存在を検知する障害物検知器を設けた。障害物検知器が避難経路上の障害物を検知したときに、火災受信機で障害物警報を行う。障害物検知器は、監視カメラと、画像処理装置とから構成される。画像処理装置は、防火戸の前方に何も障害物がない状態における通常時の画像を背景画像として記憶しており、定期的に撮像する最新画像と背景画像とを差分処理することで、障害物の検知を行う。
(もっと読む)
避難シミュレーションシステム、避難シミュレーション方法、避難シミュレーションプログラム、及び記録媒体

【課題】安全な避難を妨げるボトルネックを容易に特定して改善施策の検討を行うことができ、また、避難者の個人特性が避難の安全性に及ぼす影響を評価することができる避難シミュレーションシステムを提供する。
【解決手段】この避難シミュレーションシステム100は、シミュレーションを実行する上での条件を入力するシミュレーション条件入力手段1と、シミュレーションの対象となる建造物、避難者、及び避難に使用するエレベータに係る初期値データを格納するデータベース6と、データベース6に格納されている初期値データを読み込む初期値データ読込手段2と、各アイテムごとに設けたシミュレーションを実行するシミュレーション実行手段5と、シミュレーション実行手段5により実行されたシミュレーション結果を出力する出力手段3と、各手段を制御する制御手段4と、を備えて構成されている。
(もっと読む)
避難行動予測システムおよび避難行動予測方法
【課題】 災害発生時に街区レベルでの複数建物間の避難行動を予測して表現できる構成の避難行動予測システムおよび避難行動予測方法の実現を図る。
【解決手段】データ入力部7は、「津波シナリオ・データ」2、「時間データ」3、「津波データ」4、「空間データ」5、「人間データ」6を入力する。制御部10は、「時間データ格納部」11、「津波データ格納部」12、「空間データ格納部」13、「人間データ格納部」14、「避難者行動位置算出部」15、「画像表示部」16から構成されている。「避難者行動位置算出部」15は、前記「時間データ」3、「津波データ」4、「空間データ」5、「人間データ」6から、ある避難者の次の時間ステップ後の位置を算出し、データ出力部17に出力データ18、データファイル19を出力する。
(もっと読む)
避難支援装置および避難支援方法
【課題】地震の主要動が到達する前に避難を支援することができる避難支援装置および避難支援方法を提供する。
【解決手段】ホームサーバ24は、地震管理センターから地震情報を受信し、避難が必要な場合、アラーム21にアラーム音を発生させる。そして、一定時間経過後に監視カメラ22により人体が検知された場合、振動装置23を駆動して、地震の主要動が到達する前に、避難支援装置20が設置されている建物内に残っている者に避難すべきことを認識させる。
(もっと読む)
センサネットワークロボットシステム
【課題】移動型センサネットワークを形成する手段を備えた小型の自律運動可能なロボットを多数現場に散布し、近距離無線通信を利用して効率良い人命捜索や、救助ルートや避難ルートなどのための有益情報の抽出・提示等を行うことができるようにする。
【解決手段】災害救援に際しては、カメラ15を初め各種のセンサ11を備えたセンサネットワークロボット1を、カメラ51や通信部54を備えた無人ヘリコプター2からパルシュートで多数散布し、着地したロボットは各々自律走行して周囲の情報を収集する。このロボットは自動連結機能を備え、必要に応じて多数連結し、一体化したロボットとしてがれき上を自律走行し、情報を収集する。ロボットの収集した情報は、無人ヘリコプター2を介し、或いは直接基地3に集められ、待避ルートの割り出し61、救助ルートの割り出し62等を行い、要救助者等に提示する。同様の機能はロボットに備えてもよい。
(もっと読む)
1 - 5 / 5
[ Back to top ]