
Fターム[2F024AA01]の内容
Fターム[2F024AA01]の下位に属するFターム
Fターム[2F024AA01]に分類される特許
1 - 5 / 5
移動距離算出装置、移動距離算出システム、移動距離算出プログラム、及び移動距離算出方法

【課題】複数の移動距離算出装置で計測対象の移動距離を計測する移動距離算出システムであって、省エネルギー性に優れ、障害にも耐性のある構成を提供する。
【解決手段】移動距離算出システムを構成するプロッタ装置11a〜11cは、記憶部と、通信部と、制御部と、を備える。記憶部は、移動距離の計測の開始時刻と、計測中の所定の時刻又は計測終了時の時刻である計測時刻と、開始時刻から計測時刻までの間に計測対象が移動した距離と、を含む情報である計測情報を記憶する。通信部は、計測情報をプロッタ装置11a〜11c同士で送受信する。制御部は、通信部が受信した計測情報を記憶部に記憶し、当該記憶部が記憶する計測情報を、開始時刻及び計測時刻に基づいて重複する計測情報を除外しつつ移動距離を積算することで、計測対象の総移動距離を算出する。
(もっと読む)
移動量検知装置

【課題】移動量を精度よく検出すること。
【解決手段】移動体に搭載されて床面を撮像する第1および第2撮像部と、第1および第2撮像部によって撮像された画像データを用いて移動体の移動量をそれぞれ第1および第2移動量として算出する画像解析部と、第1および第2移動量のいずれかをその信頼度から真の移動量として判別する制御部とを備え、第1および第2撮像部は異なる被写界深度を有することを特徴とする。
(もっと読む)
走行台車のオドメトリ(車輪距離計)パラメータ調整方法及び装置
【課題】ロボットや車輌形式で自律走行するビーグル(AGV)などの自律走行台車における、車輪1回転当たりの走行量、旋回量などに関与する車輪の製作誤差や組み立て誤差、さらに時間の経過による摩耗などで生じる誤差などの補正パラメータを、容易に、正確に調整することのできる、自律走行台車のオドメトリ(車輪距離計)パラメータ調整方法及び装置を提供する。
【解決手段】前記自律走行台車のスタート位置から特定距離にあるゴール位置近傍に前記撮像装置で撮像可能なマーカを設置して、予め前記ゴール位置にて前記撮像装置で撮像した前記マーカの画像をテンプレートとして用意し、前記自律走行台車を前記スタート位置にゴール方向へ向けて設置して前記特定距離走行指示を行うか、または前記ゴール位置で1回転の旋回指令を与え、走行後または旋回後に撮像した前記マーカの撮像画像と、前記予め撮像したテンプレート画像とを用いて前記オドメトリ(車輪距離計)パラメータを調整するようにした。
(もっと読む)
計器の駆動装置
【課題】 ユーザーが車両情報データを記憶している間に車両が走行した走行距離を瞬時に認識することが可能な計器の駆動装置を提供する。
【解決手段】 計器の駆動装置1は、車両情報を表示可能な表示部(デジタル表示部)5dを有する計器5と、前記車両情報の計測値を示す車両情報データに基づいて表示部5dを動作させ、また、所定時間中の前記車両情報データを記憶手段(メモリーカード)3bに記憶させる制御手段(第一,第二の制御手段)3a,5aと、を備える。表示部5dは、走行距離を表示可能であり、制御手段3a,5aは、前記車両情報データの記憶を開始させると、記憶処理中の走行距離を示す積算データを算出して表示部5dにこの記憶処理中の走行距離を表示させてなる。
(もっと読む)
車輪に取り付けられた電子ハウジングに識別要求電磁信号を送信する方法
本発明は、車両(1)に取り付けられた中央ユニット(15)に接続されたアンテナ(11−14)により生成された識別要求電磁信号を前記車両の車輪(2−5)に取り付けられた電子ハウジング(6−9)に送信する方法に関する。本方法は、車両(1)の発進後に、複数の同一の識別要求信号(S1,....,Si, Si+1,....)を順次送信することから成り、時点Tiにおける信号Siの各送信の後に、車両(1)の変位速度Vを測定し、前記速度Vで車輪(2−5)が完全に1回転するための時間Trを計算し、Ti+1=Ti+nTr+Tθとなるように、時点Ti+1において後続の信号Si+1をトリガすることを特徴とする。ただし、ここで、nは整数≧1であり、0<Tθ<Trである。 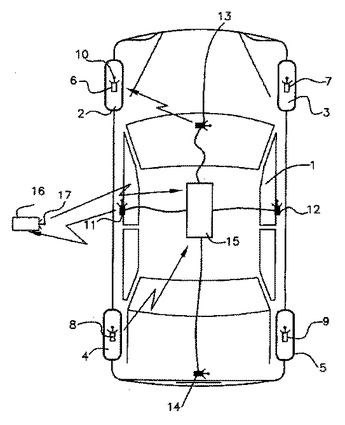 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]