
Fターム[2F024AA14]の内容
Fターム[2F024AA14]に分類される特許
1 - 20 / 27
情報処理装置、情報処理方法、プログラム、及び記録媒体
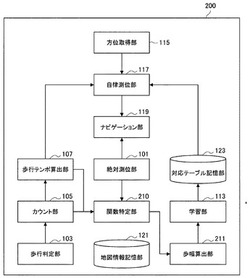
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの身体の動きに応じた第1の値を取得する取得部と、上記第1の値、及び上記ユーザの歩幅又は歩行速度を示す第2の値の間の関係を示す関数を仮定し、上記第1の値及び上記絶対位置に基づいて上記関数に含まれる係数を算出することにより上記関数を特定する関数特定部と、上記関数を用いて、上記第1の値に対応する上記第2の値を算出する算出部と、算出される上記第2の値を用いて、上記ユーザの歩行テンポと上記第2の値との対応関係を学習する学習部と、を有する。
(もっと読む)
移動端末、システム及び方法

【課題】自律航法機能を有する移動端末における測位誤差の蓄積を解消するため、ルート上の各地点で適宜位置補正する。
【解決手段】地図情報における移動端末のユーザの出発地から目的地までのルート上で前記ユーザが方位変更すると想定される方位変更地点を取得し、該取得した方位変更地点をアンカーポイントとして設定及び格納するアンカー管理部と、当該移動端末の動きを検知し、前記動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき、当該移動端末の現在位置を算出する位置算出部と、前記センサ情報に基づき、前記ユーザの回転動作を検出し、該検出した回転動作の回転地点を決定する回転検出部と、前記アンカー管理部により格納されているアンカーポイントから前記決定された回転地点に対応するアンカーポイントを決定し、該決定されたアンカーポイントの位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
歩行状況検出装置、歩行状況検出方法及び歩行状況検出プログラム
【課題】リアルタイム性を確保しながら携帯箇所によらずに使用者の歩行の状況を精度良く検出できるようにする。
【解決手段】スマートフォン1の制御部2は、鉛直加速度値A3の波形を基に着地半波HWを検出し、着地半波長T2に対する着地半波間隔T1の比率である着地半波比率Rを算出して比閾値THと比較する。このとき制御部2は、着地半波比率Rが比閾値TH未満であれば着地半波HWが1歩に相当するものと判定し、それ以外の場合は2歩に相当するものと判定し、その判定結果に基づき連続歩数WC及び累積歩数WS等の値を更新して歩行情報Fを生成する。これによりスマートフォン1は、その携帯箇所が上半身又は下半身のいずれであるかに関わらず、使用者が歩行したこと及びその歩数を1歩目から精度良く検出することができる。
(もっと読む)
移動軌跡検知装置
【課題】 磁気検知部と加速度検知部を使用して、低速時と高速時の双方で、移動軌跡を検知できる移動軌跡検知装置を提供する。
【解決手段】 基準X軸と基準Y軸および基準Z軸が予め決められている。各軸方向の磁気を検知する磁気検知部2と各軸方向の加速度を検知する加速度検知部12が搭載されている。低速走行時は、加速度検知部12で検知される徒歩の歩数から移動距離が求められ、磁気検知部2で検知される地磁気ベクトルの方位から移動軌跡が求められる。高速走行時は、磁気検知部2から地磁気ベクトルの角速度変化を検知し、その検知出力から移動軌跡が求められる。
(もっと読む)
歩数計、歩幅値の更新方法および歩幅値の更新プログラム
【課題】歩数計の使用者が、歩行により移動する距離を、歩数計により測定する際に、より正確な距離を計算することである。また、歩数計の使用者が、歩幅値の更新をする際、計測行為や設定行為を行うことを不要とすることである。
【解決手段】本発明に係る歩数計は、歩幅値を記憶する手段と、徒歩により移動する区間の距離を取得する手段と、前記区間の歩数を計測する手段と、前記距離と前記歩数から算出した歩幅値を記憶部に記憶する手段とで構成することができる。
(もっと読む)
位置算出方法及び位置算出装置
【課題】人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案すること。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
(もっと読む)
歩幅推測方法、移動軌跡算出方法及び歩幅推測装置
【課題】歩幅をより正確に推測するための新たな手法を提案すること。
【解決手段】ナビゲーション装置1において、加速度センサー41の検出結果に対するフィルター処理が行われ、Z軸の加速度のピークが検出されることで、ユーザーの歩行が検出される。そして、フィルター処理されたZ軸の加速度を用いて、ユーザーの歩行速度に応じて予め定められた相関モデル式に従ってユーザーの歩幅が推測される。また、ジャイロセンサー43の検出結果に対してもフィルター処理が行われ、フィルター処理されたZ軸回りの角速度に対する積分処理が行われて、ユーザーの歩行方向が推測される。そして、推測された歩幅と歩行方向とを用いて、ユーザーの移動軌跡が算出される。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、腕振り運動に基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、加速度データ及び地磁気データから、重力ベクトルと、該重力ベクトルに対応する地磁気ベクトルとを導出し、重力ベクトル及び地磁気ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、歩行基準ベクトル及び方位基準ベクトルに基づいて、進行方向の方位角を算出する方位角算出手段とを有する。
(もっと読む)
携帯型ナビゲーション装置
【課題】正確な移動距離や移動方向を検出して、正確な現在位置を検出すること。
【解決手段】加速度センサ(SN3)で検出した加速度のデータに基づいてユーザが歩行しているか否かを検出する歩行検出手段(KC13)と、前記加速度データに基づいて、ユーザの歩行の1周期分の加速度の履歴があったか否かを検出する歩行周期検出手段(KC18)と、ユーザが歩行を停止しているか否かを判別するための停止判別時間の間、前記歩行検出手段(KC13)が歩行を検出しなかったか否かを判別する停止判別手段(KC14)と、前記停止判別手段(KC14)により歩行を検出しなかったと判別された場合に、速度検出記憶手段(KC12)に記憶された前記移動速度を0とする速度リセット手段(KC15)と、を有する携帯型ナビゲーション装置。
(もっと読む)
携帯型歩行支援装置
【課題】利用者の歩行(ピッチや歩幅)を好ましい状態に導き、より効果的な歩行の実施を支援することのできる歩行支援装置を提供する。
【解決手段】本発明に係る携帯型歩行支援装置は、単位時間あたりの移動距離を計測する距離計測手段と、前記単位時間あたりの歩数を計測する歩数計測手段と、前記移動距離と前記歩数とから歩幅を算出する歩幅算出手段と、前記歩数と前記単位時間とからピッチを算出するピッチ算出手段と、前記単位時間における歩幅とピッチを、歩幅軸とピッチ軸とをもつ2次元グラフ上に表示する表示手段と、を備える。
(もっと読む)
変換係数の導出方法およびナビゲーション装置
【課題】変換係数を導出するか否かの判定精度を向上したい。
【解決手段】衛星測位部20は、衛星から受信した信号をもとに、移動速度、精度低下率、方位とが少なくとも含まれた測定データを測定する。距離用判定部30は、測定データの有効性を判定し、有効と判定した測定データを使用しながら、距離変換係数を導出するか否かを判定する。距離変換係数算出部34は、導出を決定した場合、距離変換係数を導出する。角速度用判定部32は、測定データのうちの移動速度をもとに、所定の期間にわたる角速度センサの出力値の積算値に対する有効範囲を決定し、有効範囲と、所定の期間にわたる出力値の積算値とをもとに、角速度変換係数を導出するか否かを判定する。角速度変換係数算出部36は、導出を決定した場合、角速度変換係数を導出する。
(もっと読む)
車両用距離検出装置
【課題】加速度センサから出力された加速度信号を用いて距離信号を求める車両用距離検出装置であっても、累積誤差の発生を低減して、より正確に走行距離を求める
【解決手段】加速度センサ11から出力された加速度信号aをデジタル化した加速度信号daは、積算処理部16にて、積分されて速度信号bが求められ、更に、速度信号bを積分して走行距離を示す距離信号cが求められる。演算部13では、FFT演算をして振動強度が最も大きい振動周波数を求める。そして振動強度が最も大きい振動周波数が、アイドリング周波数記憶部14に記憶されているアイドリング周波数になっている場合には、判定部15から、速度リセット信号Rが出力される。速度リセット信号Rが出力されると、積算処理部16では、積分する速度信号bの値を強制的に零にすることにより、速度信号cの累積誤差の増大を防止している。
(もっと読む)
携帯端末装置
【課題】歩行中のユーザが携帯する携帯端末装置において、省電力化を図りつつ、必要な位置における測位タイミングを状況に応じて自動的に決定する携帯端末装置を提供する。
【解決手段】携帯端末装置は、歩数計を内蔵し、歩数計によりカウントされる歩数を測位タイミングとして利用する。ナビゲーション開始当初にGPSによる測位が行われると、測位された現在位置から目的地までの距離又はルートに基づいて、次の測位タイミングまでの歩数を算出し、算出された歩数を歩数計がカウントすると、次のGPS測位が行われ、求められた現在位置を基準として、さらに次の測位タイミングまでの歩数が算出される。次の測位タイミングまでの歩数は、測位された現在位置から目的地までのルートにおける次の進路変更地点までの歩数、又は測位された現在位置から目的地までの距離が短くなるにつれて次の測位タイミングまでの歩数が少なくなるように設定された歩数である。
(もっと読む)
加速度センサによって検出された歩行者の歩数を補完する携帯端末及びプログラム
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された加速度センサによって導出される歩数が、手振れの影響を考慮して補完され、正確な歩数を計数する携帯端末及びプログラムを提供する。
【解決手段】携帯端末は、歩行者の歩数を計数する歩行タイミング決定手段する。その手段は、加速度データから合成加速度値を算出する合成加速度算出手段と、所定時間間隔における複数の合成加速度値を記憶するバッファ手段と、第2の時点の合成加速度値から第1の時点の合成加速度値を減算した差分が零又は正(≧0)となる増加傾向にあるときに、差分が負(<0)となる減少傾向に移行した時の極大点の数を検出するピーク検出手段と、差分が増加傾向にあるときに、合成加速度値の差分が、零に近づいた後、再び増加した時の撫肩区間の数を、極大点の数に加算して補完する歩数補完手段とを有する。
(もっと読む)
歩行者の進行方向の方向転換を判定する携帯端末及びプログラム
【課題】携帯端末を手に所持した歩行者が方向転換した際に、その方向転換を精度良く検出することができる携帯端末及びプログラムを提供する。
【解決手段】所定時間毎に、センサの検出情報に基づいて進行方向を決定する進行方向決定手段と、歩行者が方向転換したと判定する方向転換判定手段とを有する。方向転換判定手段は、進行方向を時間経過に応じて記憶し、第1の時点の第1の進行方向と第3の時点の第3の進行方向との間の第1の方位差ωが角度閾値θ以上(ω≧θ)であって、且つ、第2の時点の第2の進行方向と第4の時点の第4の進行方向との間の第2の方位差ωが角度閾値θ以上(ω≧θ)である場合に、歩行者が方向転換したと判定する。また、方向転換判定手段は、第1の方位差ωの変位方向と、第2の方位差ωの変位方向とが同じ場合にのみ、歩行者が方向転換したと判定する。
(もっと読む)
トリップメータリセット装置
【課題】トリップメータのリセット忘れを回避し、かつ、利用者の所望しないタイミングでリセットしてしまうことを回避することを課題とする。
【解決手段】自車両の現在の状態が所定の状況になったことを検知し、所定の状況になったことが検知されたことを条件として、自車両に備えられたトリップメータをリセットするか否かを選択させる選択画面を自車両に備えられた所定の表示部に表示し、表示された選択画面の選択を受け付け、トリップメータをリセットするとの選択が受け付けられたことを条件として、トリップメータをリセットする。また、トリップメータの値を取得して保持し、リセットを取り消すとの選択が受け付けられたことを条件として、保持された値を所定の表示部および/またはトリップメータに表示する。
(もっと読む)
歩行ナビゲーション方法、システムおよびプログラム
【課題】 自律航法による歩行ナビゲーションの精度を向上させる。
【解決手段】 単位質量に作用する重力と慣性力の合成ベクトルを示すデータを加速度データとして出力する三次元加速度センサから前記加速度データを任意区間内の離散時間に取得し、前記加速度データに基づいて前記三次元加速度センサの加速度の水平成分と鉛直軸成分とを導出し、前記加速度の水平成分の分布の長軸である水平振動軸の前記三次元加速度センサの姿勢を基準とする傾きを統計演算により導出し、前記加速度の前記水平振動軸成分の振動位相と前記加速度の鉛直軸成分の振動位相とのずれに基づいて前記水平振動軸に平行な二方向のうちいずれか一方向を前記任意区間における前記三次元加速度センサの姿勢を基準とする歩行方向として判定する、ことを含む。
(もっと読む)
GPS距離測定装置
【課題】所望する2点間の距離を容易に測定することができるGPS距離測定装置を実現する。
【解決手段】GPS距離測定装置1は、ユーザが所望する距離測定に応じた測定開始点と測定終了点とを現在位置指示部5aによりそれぞれ指し示した状態で操作ボタン6が操作されて、その測定開始点と測定終了点とを指定することによって、その測定開始点と測定終了点とがそれぞれ指定されたタイミングに対応し、GPSセンサ5により受信されたGPS信号に基づく位置データをそれぞれ取得することができ、その取得したGPS信号に基づく測定開始点に関する位置データと、測定終了点に関する位置データとに基づいて、測定開始点と測定終了点の間の距離を算出して表示パネル4に表示する。
(もっと読む)
歩行者用の経路案内装置及び携帯電話機
【課題】自律航法による歩行者用の経路案内装置において、精度の高い経路案内を実施し得る歩行者用の経路案内装置を提供すること。
【解決手段】歩行者用の経路案内装置1は、互いに直交する3軸方向の磁界強度を計測する3基の磁気センシング手段62と、3軸方向の加速度を計測する3基の加速度センシング手段63と、鉛直方向を検出する鉛直方向検出手段22と、鉛直方向に生じた鉛直加速度を検出する第1の加速度検出手段231と、前進加速度を検出する第2の加速度検出手段232と、歩行進行方位を検出する方位検出手段21と、経路情報を計算する経路情報計算手段29とを備えている。経路情報計算手段29は、歩行進行方位を基準とした相対的な進路方向を計算する。
(もっと読む)
デッドレコニング装置
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
1 - 20 / 27
[ Back to top ]