
Fターム[2F024BA11]の内容
Fターム[2F024BA11]に分類される特許
1 - 20 / 44
状態検出装置、電子機器及びプログラム
【課題】 フィルター処理を施した加速度検出値に基づく状態検出を行う際に、当該フィルター処理に用いるフィルターの特性を適応的に変化させることで、正確な状態検出を行う状態検出装置、電子機器及びプログラム等を提供すること。
【解決手段】 状態検出装置は、加速度センサー10から取得したセンサー情報に基づいて加速度検出値を取得する取得部110と、加速度検出値に対してバンドパスフィルター処理を行うフィルター処理部120と、フィルター処理部120からの出力信号に基づいて、ステップ周期情報を検出するステップ周期情報検出部142と、ステップ周期情報に基づいて、フィルター処理部120でのバンドパスフィルター処理のフィルター特性を適応的に変化させる制御部130とを含む。
(もっと読む)
状態検出装置、電子機器及びプログラム

【課題】 平均加速度、基準平均加速度及び基準歩幅に基づく処理を行うことで、歩幅の推定精度を高める状態検出装置、電子機器及びプログラム等を提供すること。
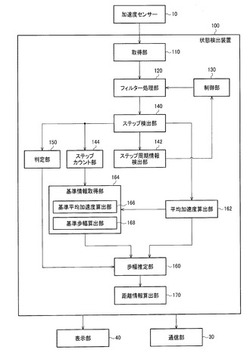
【解決手段】 状態検出装置100は、加速度センサー10からの加速度検出値を取得する取得部110と、加速度検出値に基づいて、所与の期間ごとの平均加速度を算出する平均加速度算出部162と、基準平均加速度と基準歩幅を取得する基準情報取得部164と、基準平均加速度に対する平均加速度の比、前記基準歩幅に基づいて、歩幅を推定する歩幅推定部160を含む。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの身体の動きに応じた第1の値を取得する取得部と、上記第1の値、及び上記ユーザの歩幅又は歩行速度を示す第2の値の間の関係を示す関数を仮定し、上記第1の値及び上記絶対位置に基づいて上記関数に含まれる係数を算出することにより上記関数を特定する関数特定部と、上記関数を用いて、上記第1の値に対応する上記第2の値を算出する算出部と、算出される上記第2の値を用いて、上記ユーザの歩行テンポと上記第2の値との対応関係を学習する学習部と、を有する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの歩行テンポを示す第1の値を取得する取得部と、上記絶対位置に基づいた所定距離移動したことをトリガとして、上記ユーザの歩幅又は移動速度を示す第2の値を算出する算出部と、算出される上記第2の値を用いて、上記第1の値及び上記第2の値の対応関係を学習する学習部と、を有する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、エスカレータや動く歩道やエレベータを通過することで発生する推定位置と実際の位置との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置がエスカレータ又は動く歩道又はエレベータに到達し(S41:Yes)、歩数計のカウントが一定時間停止したとき(S42:Yes)、推定位置をエスカレータ又は動く歩道又はエレベータの終点に設定する。
(もっと読む)
測位装置、歩幅データ補正方法およびプログラム
【課題】 この発明は、移動量の計測にGPSを利用することなくユーザの歩幅を求めて歩幅データを補正することのできる測位装置、その歩幅データ補正方法およびプログラムを提供する。
【解決手段】 被写体の撮影を行う撮影手段と、加速度を検出する加速度センサと、方位を計測する方位センサと、歩幅データを記憶する歩幅データ記憶手段と、直線状の移動経路上の複数の地点(X1,X2)でそれぞれ行われた撮影の情報に基づき複数の地点(X1,X2)間の距離を算出する距離算出手段と、この距離とこの移動中に計数された歩数に基づいて歩幅データを補正する歩幅補正手段とを備えている。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 歩行体の移動に対する追従性が良好で、且つ、高精度な測位を行うことのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて歩行運動と方位に関する検出を行う自律航法用センサと、自律航法用センサの出力と歩幅データとに基づいて歩行体の移動量を算出する移動量算出手段と、前記自律航法用センサの出力に基づいて一歩ごとの移動方向を算出する移動方向算出手段(ステップS1)とを備え、移動量算出手段は、自律航法用センサの出力に基づき左右の足の踏込み方向の違いに起因する移動方向の一歩毎のブレ角度(θ)を算出するブレ角度算出手段(S2〜S4)を有し、歩幅データの値をブレ角度(θ)が大きくなるに従って歩幅が大きくなるように補正して一歩ごとの移動量として算出するようにした(S5)。
(もっと読む)
歩数計、およびプログラム
【課題】使用者の動作の種別によらずに正確に歩数を計数することを、従来よりも少ない消費電力で実現する。
【解決手段】加速度センサの出力信号が増加から減少に転じたこと(すなわち、ピークとなったこと)を検出する毎に当該ピーク値を第1の閾値と比較し、さらに、その1つ手前のピークの検出タイミングとの時間間隔を第2の閾値と比較して歩数の計数の要否を判定する。次いで、検出したピーク値を第1の閾値よりも大きい第3の閾値と比較し、さらに、一つ手前のピークとの時間間隔を第2の閾値よりも短い時間を表す第4の閾値と比較して使用者の動作の種別(歩行、走行、または、何れでもない)を判定し、歩行中または走行中と判定された場合に、加速度の時間波形にピークが現れてからの波形の立下りの急峻さをその判定結果に応じて評価し、動作種別毎に歩数を累算する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案すること。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
(もっと読む)
歩幅推測方法、移動軌跡算出方法及び歩幅推測装置
【課題】歩幅をより正確に推測するための新たな手法を提案すること。
【解決手段】ナビゲーション装置1において、加速度センサー41の検出結果に対するフィルター処理が行われ、Z軸の加速度のピークが検出されることで、ユーザーの歩行が検出される。そして、フィルター処理されたZ軸の加速度を用いて、ユーザーの歩行速度に応じて予め定められた相関モデル式に従ってユーザーの歩幅が推測される。また、ジャイロセンサー43の検出結果に対してもフィルター処理が行われ、フィルター処理されたZ軸回りの角速度に対する積分処理が行われて、ユーザーの歩行方向が推測される。そして、推測された歩幅と歩行方向とを用いて、ユーザーの移動軌跡が算出される。
(もっと読む)
歩数計およびこれを内蔵する携帯端末ならびに歩数計の制御方法
【課題】より正確にユーザの歩数を求めることができる歩数計およびこれを内蔵する携帯端末ならびに歩数計の制御方法を提供する。
【解決手段】加速度Aから所定時間毎の歩数を表わす歩数変化ΔNを演算し(S100)、位置情報Pから所定時間毎の位置変化ΔPを演算する(S110)。所定時間毎の位置変化ΔPに基づいてユーザが歩行中であるか否かを判定し(S120)、ユーザが歩行中であると判定したときには歩数変化ΔNを積算して歩数Nを演算し(S130)、歩数変化ΔN,位置変化ΔPを値0に設定する(S140)。一方、ユーザが歩行中ではないと判定したときには、歩数変化ΔNを積算して歩数Nを演算する処理を省略する。
(もっと読む)
歩数計システム
【課題】カレンダ機能を持たない簡単な構成の歩数計を用いて、歩行データの日付管理を正確に行うこと。
【解決手段】カレンダ機能を持たない歩数計は計測した1日分の歩行データを保存した後ホスト装置に送信する。ホスト装置の処理部408は、第1通信部401を介して、歩数計から歩行データを受信して歩行データ記憶部406に記憶し、歩数計時刻、歩数計歩行データ保存時刻記憶部407に記憶した歩行データの保存時刻及び処理部408が前記歩行データの基準日を判定する処理時刻に基づいて、歩行データの基準日を判定して歩行データの日にちを管理する。
(もっと読む)
携帯電子機器
【課題】音声出力部により振動が発生した場合に、誤って歩数が計測されるのを抑制できる携帯電子機器を提供すること。
【解決手段】携帯電話機1は、加速度を検出する加速度センサ35と、音声データAに基づいて音声を出力するスピーカ34と、スピーカ34が出力する音声の出力状態に基づく振動パターンBにより、加速度センサ35が検出した加速度データCを補正した補正加速度データを計算する計算部42と、を備え、計算部42は、当該補正加速度データに基づいてユーザの歩数を計測する。
(もっと読む)
歩数計、および歩数の計測方法
【課題】運動負荷に応じた適切な運動量を把握することができる歩数計を提供すること。
【解決手段】歩数計10は、加速度センサーを用いて歩数を計測する歩数計測部100と、歩行する被測定者の脈拍を測定する脈拍測定部110と、測定された脈拍から、被測定者への運動負荷を推定する運動負荷推定部120と、運動負荷に応じて実測の歩数を補正する歩数補正部130と、補正された歩数を表示パネルに表示させる出力制御部140とを備える。被測定者の脈拍に応じて、運動負荷が考慮された歩数が表示されるので、歩数計10を装着した被測定者等のユーザーは、単なる実測の歩数に比べて、より適切な運動量を把握できる。
(もっと読む)
絶対移動経路算出装置及び方法、並びにプログラム
【課題】ユーザの絶対移動経路を高精度に算出する。
【解決手段】携帯電話100に予め定められた基準軸が指し示す方位を地磁気センサ30を用いて所定のタイミングで検出した結果と、ユーザの移動距離を検出した結果とからユーザの相対移動経路を算出するとともに、絶対座標上における携帯電話100の絶対位置をGPSを用いて測位する。そして、その測位された絶対位置の数が例えば3つに達した場合に、それらの絶対位置(a,b,c)と当該絶対位置を測位した時点における相対移動経路上の地点(a’,b’,c’)との関係から補正値(β’、ε’、Δcx+deltx、Δcy+delty)を算出し、この補正値と相対移動経路とから、絶対座標上におけるユーザの絶対移動経路を算出する。
(もっと読む)
活動検証装置、活動検証システム、活動検証プログラム、および活動検証方法
【課題】得られた歩行データを分析し、その歩行データが実際の人のデータであることを検証できる管理装置または歩数計、歩数検証システム、およびプログラムを提供する。
【解決手段】歩数計5は、歩行データを取得するを実行する演算部54と、前記歩行データが人の実歩行によるものか否か検証する歩行検証基準を記憶する記憶部56と、前記歩行データが前記歩行検証基準を満たすか否か検証する演算部54と、該検証処理の検証結果に基づく出力データを出力する通信部51とを備えている。前記歩行データは、振動を検知した振動データで構成され、前記歩行検証基準は、連続する前記振動データの周期に所定の偏差があること、連続する前記振動データの振幅に所定の偏差があること、連続する前記振動データに予め定めた加速度の変化があること、および、これらの組合せから選択される1の基準である。
(もっと読む)
歩数計装置
【課題】加速度センサによって測定された加速度の解析によって、歩行に起因しない、歩行による振動の周波数帯の振動が検出される場合、歩数の計測誤差を補正する。
【解決手段】歩数計測部は、加速度センサによって測定された加速度をフーリェ変換してスペクトルを計算し(ステップS21b)、バイブレータが動作中である場合(ステップS21cの「動作中」)、上記計算されたスペクトルから、装置が静止し、かつ、バイブレータが動作中に加速度センサによって測定された加速度をフーリェ変換して計算されたスペクトルを減算して(ステップS21d)、減算されたスペクトルを用いて計測された歩数をカウントアップする(ステップS21f)。
(もっと読む)
携帯電子機器
【課題】本発明は、位置情報を利用して、測定値に大きな誤差が生じることが抑制された歩数計機能を有する携帯電子機器を提供することを目的とする。
【解決手段】携帯電話機1は、3軸加速度センサ100と、位置情報取得部102と、加速度値の検出値波形パターンにおける振幅が第2閾値BX以上であるかを判定する第1判定部111aと、位置情報に基づいて移動状態であるかを判定する第2判定部111bと、振動周期が第1閾値AX以上の第1検出値波形パターンか、第1閾値AX未満の第2検出値波形パターンかを判定する第3判定部111cと、第1検出値波形パターンの数をカウントするカウント部112と、第1検出値波形パターンの時間当たりの数に第2検出値波形パターンの継続時間を乗じて第1検出値波形パターンの数を推定する推定部115と、推定数をカウント数に加算する加算部116と、を備える。
(もっと読む)
携帯機器、歩数カウント方法および重力方向検出方法
【課題】 回路規模および演算負荷を大きくすることなく歩数をカウントすること。
【解決手段】 携帯電話機は、互いに異なるX軸、Y軸およびX軸の3方向の加速度を検出する3軸加速度センサと、検出された3方向の加速度に基づいて、重力方向を検出する重力方向検出部(S04)と、検出された3方向の加速度に基づいて検出された重力方向の加速度を算出する重力方向加速度算出部(S07)と、算出された重力方向の加速度に基づいて、歩数をカウントする歩数カウント部(S12)とを備える。
(もっと読む)
1 - 20 / 44
[ Back to top ]