
Fターム[2F034AA08]の内容
運動の有無又は方向の指示又は記録 (1,376) | 測定対象 (366) | 固体 (155)
Fターム[2F034AA08]の下位に属するFターム
Fターム[2F034AA08]に分類される特許
1 - 15 / 15
ピグ通過確認装置
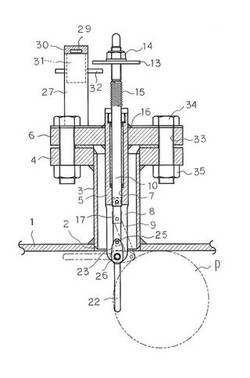
【課題】ピグがいかなるスピードで走行してきても、空振りすることなく、かつ検出棒とコネクティングと摺動軸の伝達がスムーズに行われ、連結部に遊びがあって衝撃を緩和して長期にわたって損傷を防ぐことができるピグ通過確認装置を提供することを目的とするものである。
【解決手段】 本管1内に突出する検出棒22を設ける。検出棒22の上部にコネクティング17を連結する。コネクティング17の上部に連結する摺動軸10を具備する。前記検出棒22は、ピグPの通過により進行方向に回動してコネクティング17を介して摺動軸10が下降する。表示部の指針の移動によって通過を確認する。
(もっと読む)
運動検出装置、電子機器、運動検出方法及びプログラム

【課題】いずれの軸方向に運動したか及び運動の大きさを簡易な処理で正確に検出する。
【解決手段】3軸加速度センサ12により検出された、運動検出装置10に作用する加速度の3軸の加速度成分データの各々を、ローパスフィルタ処理して得られた静止成分と、加速度成分データの各々から静止成分の各々を除いた動き成分とに分離する。分離された最大の値を示す動き成分に基づいて、いずれの軸方向に運動したかを検出する。また、その動き成分が、所定範囲の上限値を示す閾値Thuを超えた時点から下限値を示す閾値Thd未満となった後に所定範囲内の値となるまでの時間、または閾値Thd未満となった時点から閾値Thuを超えた後に所定範囲内の値となるまでの時間をシェイク時間として検出し、シェイク時間が判定時間以上か否かにより、またはシェイク時間内のベクトル積分値が判定閾値以上か否かにより振りの大きさを判定する。
(もっと読む)
動き検出装置および方法
【課題】 動き検出装置および方法を提供する。
【解決手段】 1つ以上の第1回転角測定センサを用いて第1角を測定し、1つ以上の第2回転角測定センサおよび前記1つ以上の第1回転角測定センサと相違する1つ以上の2軸の角速度センサを用いて第2角を推定し、1つ以上の第3回転角測定センサおよび前記1つ以上の2軸の角速度センサを用いて前記2軸のうちのいずれか1つである第3角を推定する動き検出装置を提供する。
(もっと読む)
画像解析システム及びコンピュータプログラム
【課題】 測定対象の濃淡画像を用いた画像相関法によるPIV解析を可能にすると共に、信頼性の高い出力結果を得る。
【解決手段】 画像処理手段43が、連続する二時刻の画像データから、所定周波数以下の空間周波数成分をカットするハイパスフィルタを構成するフィルタリング手段431を備えている。これにより相関係数のピークが明確になり、PIV 解析を適用して二時刻の画像データにおける所定の濃淡画像間の移動距離及び移動方向(速度ベクトル)が得られる。得られた速度ベクトルに誤ベクトルが含まれていると判定された場合、カットオフ周波数を調整して、改めてフィルタリング手段431によるフィルタリングが行われ、この改めてフィルタリング処理された画像データについて、再度PIV解析が行われる。これにより、誤ベクトルが含まれない速度ベクトルが得られる。
(もっと読む)
運動検知装置とその方法
【課題】従来よりも演算のデータ量が少なく、演算速度を十分に向上させることができると共に、ハード-ウエアのコストを下げることができる運動検知装置を提供する。
【解決手段】本発明の運動検知装置は2本のリニアセンサーを含み、それらは平行ではないように設置されており、光源信号データを検知するのに用いられる。演算ユニットは、2本のリニアセンサーが検知した光源信号データにより順次、関連性、運動方向の判定、速度の演算などを行い、それにより、検知する表面9に対する運動検出装置の移動方向と速度を知ることができる。本発明は2本のリニアセンサーにより光源信号のデータを順次検知するため、従来の面型のセンサーで光源信号を検知するよりも演算のデータ量が少なく、演算速度を十分に向上させることができると共に、ハード-ウエアのコストを下げることができる。
(もっと読む)
画像解析システム及びコンピュータプログラム
【課題】 粒子画像を用いることなく、測定対象の濃淡画像を用いた画像相関法によるPIV解析を可能とする。
【解決手段】 本発明の画像解析システムは、画像処理手段43が、連続する二時刻の各濃淡画像の空間周波数成分をフィルタリングして、少なくとも所定長以上、好ましくは参照領域の長さLの2倍より長い波長、より好ましくは参照領域の長さLよりも長い波長の空間周波数成分をカットするフィルタリング手段431を備えている。これにより相関係数のピークが明確になり、この相関係数のピーク位置から二時刻の濃淡画像間の最大移動距離を得ることができ、その結果、画像相関法を適用して速度データを得ることが可能になる。
(もっと読む)
回転および傾斜変化情報を検知可能な運動感知装置およびその運動感知方法
【課題】正確な運動軌跡を発生できる回転および傾斜変化情報を検知可能な運動感知装置およびその方法を提供する。
【解決手段】本発明の回転および傾斜変化情報を検知可能な運動感知装置は、発光ユニット50と、センサ制御ユニット51と、画像センシングユニット52と、回転センシングユニット53と、傾き角センシングユニット54と、データストレージユニット55と、演算ユニット56とを含む。画像センシングユニット52は反射光信号Rを受信する。回転センシングユニット53は、該運動感知装置の回転角度変化信号を検知する。傾き角センシングユニット54は、該運動感知装置の傾斜角度変化信号を検知する。演算ユニット56は、前記反射光信号、前記回転および傾斜角度変化信号にそれぞれ基づいて、該運動感知装置の検知表面に対しての運動方向および速度、該運動感知装置自体の回転角度、および該運動感知装置自体の傾斜角度をそれぞれ算出する。
(もっと読む)
位置検出装置
【課題】移動部位のストロークリミットへの到達を検出するセンサを大幅に削減可能な位置検出装置を実現する。
【解決手段】本位置検出ユニット(位置検出装置)LSは、成形品取出機の旋回部2に設けられ、3軸加速度センサ71を搭載するセンサ部70と、マイクロコンピュータ84を有する処理部80とを備える。センサ部70では、取出ヘッド5を昇降移動させる昇降用シリンダ40や昇降アーム4を進退移動させる引抜用シリンダ30におけるストロークリミット到達の際の振動を検出し、また、旋回用シリンダ20におけるストロークリミット到達による旋回部2の傾きを検出する。処理部80では、センサ部70の検出信号に基づいて上記ストロークリミットへの到達を判断する。これにより、取出ヘッド5や昇降アーム4、旋回部2等の移動部位のストロークリミット到達を集約的に認識でき、直接的に検出していたリミットセンサを大幅に削減できる。
(もっと読む)
変位方向検出装置
【課題】粘弾性部材を用いて、移動部材20が固定部材11、12に対して少なくとも直交2軸方向へ相対変位する場合に、移動部材20の相対変位方向を検出することができる変位方向検出装置を提供する。
【解決手段】上側固定部材11と移動部材20との間に第1粘弾性部材31を配置し、下側固定部材12と移動部材20との間に第2粘弾性部材32を配置する。そして、第1粘弾性部材31のインピーダンスZ1と第2粘弾性部材32のインピーダンスZ2との差に基づき、移動部材20が上下方向へ変位したのか、それとも、左右方向へ変位したのかを判断する。
(もっと読む)
速度範囲にわたって対象と光入力装置の相対移動を測定する方法
少なくとも一つの測定軸に沿って、入力装置と対象(15)の相互に対する移動を測定する方法および光学モジュールである。各測定軸に測定ビーム(13)を発生させるため、レーザ孔を有するレーザ装置(3)が提供される。測定ビーム(13)は、対象(15)の照射に使用され、対象(15)から反射された測定ビーム放射線と、レーザ孔に再進入する放射線とにより、レーザ内で自己混合効果が生じ、レーザ孔の作動が変化する。検出器(4)を用いることにより、これらの変化を表す測定信号が生じ、電子処理回路(18)は、相対移動の速度に応じて、測定信号の少なくとも2つのパラメータのうちの一つを選定し、これを用いて、相対移動の速度および方向が決定される。
 (もっと読む)
(もっと読む)
スポーツ器具におけるモーションセンサ
【課題】光学モーションセンサをスポーツ器具に使用して動きを検出する。
【解決手段】埋め込み光学センサを備えたスポーツ器具。埋め込み光学センサは、イメージアレイとナビゲーションエンジンとを有する。ナビゲーションエンジンは、イメージアレイから画像情報を受信し、画像間のオーバラップを求めるために画像情報の相関判定を実施し、動きを検出するために画像間のずれを判定する。
(もっと読む)
移動測定装置及びその製造方法
【課題】安価でランニングコストが安い移動測定装置及びその製造方法を提供すること。
【解決手段】この移動測定装置100は、光学式マウス用ポジションセンサー5を光学マウスから取り出し、この光学式マウス用ポジションセンサー5のイメージ・センサー5aで食品等の被測定物1を撮像する。イメージ・センサー5aの出力信号はマイクロコンピュータ6により演算され、被測定物1の移動速度等の情報を求める。また、被測定物1との間の距離を測定するため距離センサー4が設けられ、この距離センサー4の信号に基づいて光学レンズ3の焦点を自動制御する。
(もっと読む)
環境センサを用いて少なくとも1つの対象を分類するための装置
環境センサを用いて少なくとも1つの対象を分類するための装置が提案されている。装置は、少なくとも1つの対象を当該対象の速度と加速度を用いて分類し、装置は、環境センサの少なくとも1つの信号から速度及び加速度を特定する。 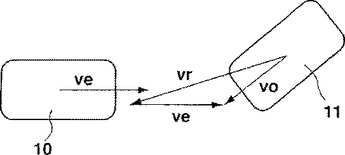 (もっと読む)
(もっと読む)
物体識別のための量子ドットを備えた性能測定システム
【課題】携帯でき、使用しやすく、正確であり、屋外使用に適した、ゴルフクラブ及びボールの運動データを捕捉できるモニタシステムを提供する。
【解決手段】本発明は、少なくとも1つの蛍光マーカ(60a)を用いて所定の視野内を運動する少なくとも1つの物体(60)の飛行特性を測定するモニタシステム(10)に関する。一実施形態では、蛍光マーカの放出スペクトルは、好ましくは幅が狭く且つ実質的に対称である。蛍光マーカが広い励起スペクトルに対応できることが望ましい。好ましくは、蛍光マーカは、量子ドットを有する。量子ドットは、任意所望の方式で製造でき、かかる量子ドットは、半導体、金原子等から成るのがよい。
(もっと読む)
移動端末に関する装置の高速移動状態を検出する方法及び装置
本発明は、移動端末の高速移動状態を検出する方法を提供し、受信信号サンプルに基づいてチャネルインパルス応答(CIR)を推定するステップと、この受信信号サンプルと推定されたチャネルインパルス応答とに基づいてチャネル等化を実行するステップと、等化された信号サンプルに基づいて関連のタイムスロットの特定の領域で少なくとも1つの特性値を計算するステップと、この少なくとも1つの特性値が所定の条件を満たす場合に、移動端末が高速移動状態にあることを決定するステップとを有する。本発明はまた、対応する装置を提供し、受チャネル推定器と、チャネル等化器と、等化された信号サンプルに基づいて関連のタイムスロットの特定の領域で少なくとも1つの特性値を計算する計算手段と、この少なくとも1つの特性値が移動端末の所定の条件を満たす場合に、高速移動状態にあることを決定する決定手段とを有する。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]