
Fターム[2F034DC02]の内容
運動の有無又は方向の指示又は記録 (1,376) | 固体物体の運動の測定 (54) | 方向、向き (35)
Fターム[2F034DC02]に分類される特許
1 - 20 / 35
位置計測装置及び位置計測システム
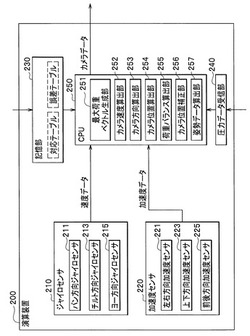
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
(もっと読む)
移動方向判定システム

【課題】低コスト且つ分解能が高い移動方向判定システム11を提供する。
【解決手段】移動方向判定システム11は、人体の移動方向をそれぞれ判定する複数のセンサモジュール12a〜12gを組合わせたものである。複数のセンサモジュール12a〜12gは、それぞれ、3つの焦電センサ部21a〜21cと、3つの焦電センサ部21a〜21cにより検出された電磁波に基づいて、人体の移動方向を判定する移動方向判定部とを備える。そして、センサモジュール12a〜12g毎に判定された進入及び進出に係わる36通りの移動方向を組合わせることにより、移動方向判定システム11全体としての人体の移動方向を判定する。
(もっと読む)
進行方向推定装置、携帯端末、制御プログラム、コンピュータ読み取り可能な記録媒体、および進行方向推定方法
【課題】移動体と装置との相対位置が変化しても、移動体の移動動作から進行方向を精度よく推定する。
【解決手段】加速度微分特徴量aW´を出力する加速度微分特徴量計算部110と、加速度微分特徴量aW´を、世界座標系における鉛直方向成分と、当該鉛直方向に直交する方向に設定した仮進行方向成分と、上記仮進行方向および上記鉛直方向に直交する仮横方向成分とに成分分解する鉛直/水平面分解部130と、仮進行方向成分および仮横方向成分に現れるパターンそれぞれについて、上記歩行動作時における、移動体の進行方向および横方向の加速度または角速度の周期性を表す特徴的パターンとの比較を行うパターン比較部150と、仮値を更新して比較した結果、最も合致度が高い仮値を、推定した進行方向として出力する推定進行方向出力部170とを備える。
(もっと読む)
進行方向判定装置、方法、プログラムおよび記録媒体
【課題】装置に内蔵するセンサ類のみによって進行方向を判定することができる進行方向判定装置、方法、プログラムおよび記録媒体を提供する。
【解決手段】車速センサ111に検出された車両の速さVと、ヨージャイロ113に検出された角速度ωと、の積により加速度理論値at=ωVを算出し、算出した加速度理論値atの方向と、加速度センサ112に検出された加速度実測値ayの方向と、を比較し、同一方向であれば前進と判定し、同一方向でなければ後進と判定するので、外部からシフトポジションや操舵角等の情報を取得せずに、進行方向を判定することができる。
(もっと読む)
球体の回転検出装置及び方法
【課題】遠心力による加速度の影響を受けずに簡単な構成で回転をともなって飛翔する球体の回転速度及び回転方向を推定できる球体の回転計測装置を提供する。
【解決手段】ボール1を投げて、当該ボール1の重心に設けられた3軸加速度センサ3から検出された3軸の加速度信号が無線送信され、信号処理装置8が受信した加速度信号をA/D変換して得られた加速度データから、演算処理部9において加速度データからボール1が飛翔中の3軸方向の加速度信号を抽出し、3軸の加速度信号の合成加速度信号からオフセット分を除去する前処理を行なってから、連続ウェーブレット変換処理を行って得られた周波数振幅値の時間変化から球体の回転速度及びその時間変化を推定し、抽出された3軸方向の加速度信号の振幅比の時間変化から球体の回転軸を中心とする回転方向を推定してこれらを表示装置10へ表示する。
(もっと読む)
歩行方位検出装置および歩行方位検出方法
【課題】歩行者の歩き始めの歩行方位を、素早く高精度に検出することができる歩行方位検出装置を提供すること。
【解決手段】歩行方位検出装置700は、人の歩行方位を検出する装置であって、人の加速度の鉛直成分および水平成分を取得する加速度成分算出部730と、鉛直成分および水平成分の時系列データに基づき、歩行方位を判定する歩行方位算出部770とを有し、歩行方位算出部770は、人が停止状態にあった直後に鉛直成分が極小を呈したとき、加速度の方位を歩行方位とする。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】利用者に端末の姿勢が大凡一定となるように所持された携帯端末について、その携帯端末に搭載された加速度センサ及び地磁気センサを用いて、できる限り少ない演算量で歩行者の進行方向を決定する携帯端末等を提供する。
【解決手段】進行方向決定手段は、鉛直方向加速度算出手段と、歩行タイミング検出手段と、歩行タイミングに基づいて、指定歩数分の加速度データを取得する指定歩数分加速度取得手段と、指定歩数分の加速度データから、歩行者の歩行動作によって生じる加速度面を推定する加速度面推定手段と、加速度面及び鉛直方向加速度から、当該加速度面における法線ベクトルと、前後方向加速度とを算出する前後方向加速度算出手段と、法線ベクトルにおける右向き単位ベクトルと、重力ベクトルGと、地磁気ベクトルMとを用いて、進行方向を算出する進行方向算出手段とを有する。
(もっと読む)
運動検出装置、電子機器、運動検出方法及びプログラム
【課題】いずれの軸方向に運動したか及び運動の大きさを簡易な処理で正確に検出する。
【解決手段】3軸加速度センサ12により検出された、運動検出装置10に作用する加速度の3軸の加速度成分データの各々を、ローパスフィルタ処理して得られた静止成分と、加速度成分データの各々から静止成分の各々を除いた動き成分とに分離する。分離された最大の値を示す動き成分に基づいて、いずれの軸方向に運動したかを検出する。また、その動き成分が、所定範囲の上限値を示す閾値Thuを超えた時点から下限値を示す閾値Thd未満となった後に所定範囲内の値となるまでの時間、または閾値Thd未満となった時点から閾値Thuを超えた後に所定範囲内の値となるまでの時間をシェイク時間として検出し、シェイク時間が判定時間以上か否かにより、またはシェイク時間内のベクトル積分値が判定閾値以上か否かにより振りの大きさを判定する。
(もっと読む)
電子キーシステム
【課題】電子キーシステムにおいて、無線技術を利用した電子キーの存在する位置の偽装等を困難とすることで、よりセキュリティ性を向上させること。
【解決手段】車両2の走行開始と同時に車載機20から車内に走行開始信号が送信される。電子キー10は走行開始信号を受けると電子キー10の動きを示す運動情報信号を返信する。一方、車載機20は車両側加速度センサ29及び車両側方位センサ25の検出結果に基づき車両2の走行状況を認識する。また、車載機20は、受信した運動情報信号に基づき電子キー10の動きを認識する。車載機20は電子キー10の動きが車両2の走行に伴う動きではないと判断した場合には、電子キー10が車内に存在しないおそれがあるとして車両2の走行を規制する。これにより、不正な走行による車両盗難等を抑制することが可能となる。
(もっと読む)
携帯端末装置の移動状態を推定する方法及びシステム
【課題】ユーザの移動状態を推定するためのモデルを作成し、該モデルに基づいてユーザの移動状態を携帯端末装置を用いて自動的に推定する方法及びシステムに関する。
【解決手段】少なくとも1つのCPUとメモリとを備える携帯端末装置の移動状態を推定する方法であって、該CPUが時系列に前記メモリに格納された1又は複数のパラメータから構成される推定用特徴パラメータと1又は複数のパラメータから構成される各該代表特徴パラメータとのパラメータ毎の差に基づいて、該複数の第1クラスタから該差が第1の条件を満足する1の第1クラスタを選定するステップと、該選定された第1クラスタに対応する該第1確率表に基づいて算出された推定用セグメント確率表から、第2の条件を満足する移動状態を特定することにより移動状態を推定するステップと、からなる方法。
(もっと読む)
移動方向算出装置および移動方向算出プログラム
【課題】歩行者の動作が微少であっても、誤検出することなく正確な移動方向を算出すること。
【解決手段】移動方向算出装置110は、歩行者100の前後、左右、上下の各方向の加速度を検出する加速度センサ120の検出値を利用して歩行者が歩行中か否か、歩行中であれば、前後左右のいずれの方向に移動しているかを算出することができる。さらに、加速度センサの検出値を利用して歩行者の移動形態も特定するため、歩行者の移動状況を高精度に特定することができる。
(もっと読む)
音声ガイド装置および音声ガイドシステム
【課題】目的地がそのときの利用者の向いている方向に対してどちらの方向にあるかを音声で案内する音声ガイドシステムを提供する。
【解決手段】街路の交差点に案内板4を設置する。案内板4は、複数のガイド対象物のカテゴリ、方向を含むガイド情報を超音波帯域で特定方向に送信する。通行人10、11、12は、それぞれ受信装置であるガイド端末を装着している。ガイド端末は、利用者(通行人)から所望のカテゴリの選択を受け付ける。また、ガイド端末は、超音波のガイド情報の到来方向に基づいて自装置(通行人)の向いている方向を検出する。ガイド端末は、受信したガイド情報のなかから利用者所望のカテゴリのものを選択し、そのガイド対象物の方向と利用者の向いている方向との差(相対方向)を表す文言を合成して再生する。
(もっと読む)
歩行者用ナビゲーション装置および歩行者用ナビゲーション装置における移動方向検出方法
【課題】消費電力を抑えつつ、歩行者が保持する歩行者用ナビゲーション装置の移動の向きを精度良く検出すること。
【解決手段】座標変換部103は、加速度ベクトルを歩行者用ナビゲーション装置100を基準とした座標に変換し、BPF105は、座標変換後の加速度ベクトルの周波数成分のうち歩行者の歩行周波数成分を透過させ、移動方向(歩行者用ナビゲーション装置基準)検出部106および移動の向き(歩行者用ナビゲーション装置基準)検出部107は、歩行者用ナビゲーション装置100を基準とした座標における歩行者用ナビゲーション装置100の移動方向および移動の向きを検出し、移動の向き(地球基準)算出部109は、地球を基準とした座標における歩行者用ナビゲーション装置100の移動の向きを算出する。
(もっと読む)
移動方向算出装置、移動方向算出プログラムおよび移動方向算出方法
【課題】歩行体が特殊な歩き方をした場合であっても、高精度に歩行体の移動方向を算出可能な移動方向算出装置を提供すること。
【解決手段】移動方向算出装置110は、検出部111によって歩行体100におけるX軸、Y軸、およびZ軸との3軸方向の加速度を検出する。そして、クロススペクトル算出部112では、検出されたZ軸方向の加速度とX軸方向の加速度とクロススペクトルと、Z軸方向の加速度とY軸方向の加速度とクロススペクトルとを算出することによって、歩行体100の上下運動と連動した加速度変化を検出する。判別部113では、算出されたクロススペクトルのうち最大値となる値が、いずれの軸方向の加速度であるかに応じて、歩行体100の移動方向を判別し、出力部114によって、判別された方向を歩行体100の移動方向として出力させる。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、腕振り運動に基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、加速度データ及び地磁気データから、重力ベクトルと、該重力ベクトルに対応する地磁気ベクトルとを導出し、重力ベクトル及び地磁気ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、歩行基準ベクトル及び方位基準ベクトルに基づいて、進行方向の方位角を算出する方位角算出手段とを有する。
(もっと読む)
無線タグ通信装置
【課題】移動体の移動方向を推定すると共に、無線タグとの通信時間を長くして無線タグから情報を確実に取得し、移動体の移動管理を高い信頼性で行う。
【解決手段】無線タグ通信装置1は、リーダ200と、リーダ200と接続されたリーダアンテナ210と、リーダアンテナ210を回動させる駆動モータ12と、無線タグを備えた人Aの通過を検出する重量センサ13,14とを有している。リーダ200は、重量センサ13,14により人Aの存在が検出されると、リーダアンテナ210が人A側を向くように駆動モータ12を制御すると共に、リーダアンテナ210から電波を送信して無線タグTと情報送受信を行う。そして、リーダ200は、無線タグのタグIDが読み取れたときに、重量センサ13,14における人Aの重量検出順序に基づいて、人Aの移動方向を推定する。
(もっと読む)
電界測定システム
【課題】 3軸電界センサの計測データにより、電気モーメントとみなせる目標体の運動方向、向きが特定でき、運動パターンを区別し得る電界測定システムを提供する。
【解決手段】同一平面上に第1の電界センサSAと第2の電界センサSBとを配置しておき、配置領域内を運動目標体が通過すると、第1と第2の電界センサSA、SBで目標体によるXY軸の電界データをデータ処理装置に取り込み、X軸とY軸の電界から電界ベクトル回転角を求め、所定時間経過後のベクトル回転角の変化から電界ベクトル回転方向の正負の別を求め、求めた第1と第2の電界センサSA,SBに係る電界ベクトル回転方向の正負の別の組み合わせから目標体の運動コース1〜4を特定する。
(もっと読む)
移動方向算出装置、移動方向算出プログラムおよび移動方向算出方法
【課題】処理負担が軽く、かつ、高精度に歩行体の移動方向を算出可能な移動方向算出装置を提供すること。
【解決手段】移動方向算出装置110は、検出部111によって歩行体100におけるX軸、Y軸、およびZ軸との3軸方向の加速度とを検出する。そして、検出されたZ軸方向の加速度の加速度曲線のピーク間隔を歩行体100の歩行間隔として特定する。さらに、方向算出部113によって、特定した歩行間隔における各軸方向の加速度曲線を用いて、歩行体100が前後、左右、右斜め前後、左斜め前後の8方向の各方向に移動しているかの可能性をポイント化したスコアを算出し、出力部114によって、算出されたスコアが最も大きい方向を歩行体100の移動方向として出力する。
(もっと読む)
スイッチ装置
【課題】スイッチの操作面前方にて使用者の手や指が接近または横断する移動方向を精度良く識別し、負荷を駆動するスイッチを提供する。
【解決手段】複数の位置検知エリアを備えたスイッチ装置であって、複数の位置検知エリアが重複する領域であって、複数の位置検知エリア間における被検知体の連続した動きを検知するための連続動作検知エリアを備え、複数の位置検知エリアと連続動作検知エリアにおける検知情報に基づいて、被検知体の移動方向を算出し、直接または間接的に負荷を駆動するための駆動信号を出力する。
(もっと読む)
回転および傾斜変化情報を検知可能な運動感知装置およびその運動感知方法
【課題】正確な運動軌跡を発生できる回転および傾斜変化情報を検知可能な運動感知装置およびその方法を提供する。
【解決手段】本発明の回転および傾斜変化情報を検知可能な運動感知装置は、発光ユニット50と、センサ制御ユニット51と、画像センシングユニット52と、回転センシングユニット53と、傾き角センシングユニット54と、データストレージユニット55と、演算ユニット56とを含む。画像センシングユニット52は反射光信号Rを受信する。回転センシングユニット53は、該運動感知装置の回転角度変化信号を検知する。傾き角センシングユニット54は、該運動感知装置の傾斜角度変化信号を検知する。演算ユニット56は、前記反射光信号、前記回転および傾斜角度変化信号にそれぞれ基づいて、該運動感知装置の検知表面に対しての運動方向および速度、該運動感知装置自体の回転角度、および該運動感知装置自体の傾斜角度をそれぞれ算出する。
(もっと読む)
1 - 20 / 35
[ Back to top ]