
Fターム[2F051AA11]の内容
特定の目的に適した力の測定 (5,882) | 用途 (1,694) | 工作機械 (99)
Fターム[2F051AA11]の下位に属するFターム
Fターム[2F051AA11]に分類される特許
1 - 20 / 65
複数リンク型重機に於ける反力荷重推定方法及び装置
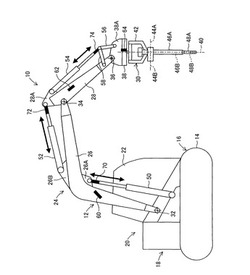
【課題】複数リンク型重機において、対象物より受ける反力荷重を正確に且つ確実に推定する方法及び装置を提供する。
【解決手段】相対的に枢動可能に直列的に連結された複数のリンクを有し、複数のリンクは重機本体20に枢支された基幹リンク26と対象物に必要な作用を行う先端リンク30とを含む複数リンク型重機10が対象物より先端リンクの作用点にて受ける反力荷重を推定する方法及び装置であって、各リンクについて作用点に作用する反力荷重を求めるためのラグランジェの運動方程式を導出し、各リンクの回転角を検出すると共に、各リンクの重機本体側の枢軸線の周りのトルクを推定し、これらに基づいてラグランジェの運動方程式を解くことにより反力荷重を演算し、反力荷重に基づいて先端リンクが作用点にて対象物より受ける反力荷重を演算する。
(もっと読む)
ねじの任意負荷荷重試験装置

【課題】 従来、トルク変化に基づいて固有の振動動作を予測して、変数としてねじの回転数、振動振幅偏差、揺動周波数を入力して繰り返し運転し、ねじの異常を強制的に発生させて、原因を追求するという、得られた結果からねじの品質向上を図るための試験装置は存在していなかったという点である。
【解決手段】 電源と、その電源と電気的に接続されるモータドライブと、そのモータドライブで稼動されるねじ駆動用モータと、そのねじ駆動用モータとトルク検出器を介して設けられる対象ねじの設置部と、そのねじの設置部に設けられるタコジェネレータとを有し、前記モータドライブには電源と電気的に接続されたプログラマブルコントローラを接続し、かつ、ねじ駆動用モータにはパルスジェネレータを接続し、前記モータドライブには揺動予想入力波形設定器を接続し、前記プログラマブルコントローラには操作盤とレコーダを接続してあり、前記トルク検出器もそのレコーダに接続してあることとする。
(もっと読む)
油圧式トルクレンチの締付力の制御装置
【課題】超音波探触子を用いて締結部材の締付力の測定を行うようにするとともに、そのための電気的な接続機構を簡易に構成し、かつ、メンテナンスを容易に行うことができるようにした油圧式トルクレンチの締付力の制御装置を提供すること。
【解決手段】主軸Sの先端部に着脱可能に配設したソケットSoに超音波探触子Seを配設し、この超音波探触子Seから導出したケーブルCa1をソケットSoに配設したピン形状の電極E1に接続し、この電極E1と、ソケットSoの外周部に配設したソケットSoを回転可能に支持する支持体Suに配設した円環状の電極E2とを摺接させることにより電気的に接続し、支持体Suに配設した電極E1をケーブルCa2を介して外部のコントローラCon1、Con2、Con3に接続する。
(もっと読む)
力覚センサチップ
【課題】陽極接合の際に、陽極接合の不具合や、センサ回路の損傷が起きない力覚センサチップを提供する。
【解決手段】外力作用領域部4Aを有する作用部4と、この作用部4を支持する支持部3と、作用部4と支持部3とを連結する連結部と、を備える半導体基板からなるベース部材2と、連結部の変形発生部に設けられた歪み検出用抵抗素子Sと、を備え、作用部4の表面又は作用部4が形成された面の裏面に、陽極接合する際に電流が供給される電極である陽極接合用電極8が配置されていることを特徴とする。
(もっと読む)
予圧関連量測定装置付回転機械
【課題】アンギュラ玉軸受9a〜9dに付与されている予圧荷重を測定可能な構造を実現する。
【解決手段】主軸8の一部で、1つのアンギュラ玉軸受9cを構成する内輪15cを軸方向両側から挟む位置に、1対のエンコーダ5a、5bを外嵌する。これら両エンコーダ5a、5bの外周面の磁気特性を、円周方向に関して交互に変化させると共に、円周方向に隣り合う異なる磁気特性同士の境界を軸方向に対して傾斜させる。ハウジング7に支持した1対のセンサユニット6a、6bを構成するセンサ21a、21bの検出部を、前記両エンコーダ5a、5bの外周面に対向させる。この状態で、前記予圧荷重が変化する事に伴い、前記各部材5a、5b、15cの軸方向の圧縮ひずみが変化すると、前記両センサ21a、21bの出力信号間の位相差が変化する。そこで、図示しない演算器に、この位相差に基づいて、前記予圧荷重を算出する機能を持たせる。
(もっと読む)
回転機械用物理量測定装置
【課題】エンコーダ1aと組み合わせて使用するセンサ10、10の個数を、3個のみと、少なくした状態で、前記エンコーダ1aを外嵌固定した回転部材の5方向の変位x、y、z及び傾きφx、φzを測定できる構造を実現する。
【解決手段】前記エンコーダ1aとして、被検出面である外周面に、複数の特性変化組み合わせ部3a、3aを円周方向に等ピッチで形成したものを使用する。これら各特性変化組み合わせ部3a、3aは、前記エンコーダ1aの軸方向に対して互いに逆方向に傾斜した第一凹溝11a及び第二凹溝11bから成るものとする。前記エンコーダ1aの外周面のうちで円周方向の位相が互いに異なる部分に、3個のセンサ10、10の検出部を対向させる。これにより、これら各センサ10、10の出力信号から得られる情報に基づいて、前記5方向の変位x、y、z及び傾きφx、φzを算出可能とする。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材が高速回転する状態での物理量の算出処理に異常が発生する事を防止しつつ、この物理量の測定に関する応答性を、前記回転部材の総ての回転速度範囲で十分に確保できる構造を実現する。
【解決手段】エンコーダ1aの被検出面に設けた複数の特性変化組み合わせ部3a1、3a2、3a3を構成する第一透孔11a1、11a2、11a3のピッチを、円周方向に関してα、β、γ(α<β<γ)の順で繰り返し変化させる。前記回転部材の回転速度が低い状態では、総てのピッチα、β、γ部分で取得したセンサ情報に基づいて物理量の算出を行う。又、前記回転速度が中程度の状態では、一部のピッチβ、γ部分で取得したセンサ情報のみに基づいて物理量の算出を行う。更に、前記回転速度が高い状態では、より少ない一部のピッチγ部分で取得したセンサ情報のみに基づいて物理量の算出を行う。
(もっと読む)
トルク計測装置
【課題】トルク計測装置の製造時等において、トルクセンサ部の記憶部に対して定格情報等の入力作業を容易に行うことができるトルク計測装置を提供すること。
【解決手段】トルク計測装置1は、ねじ締め機に取り付けられ該ねじ締め機の締め付けトルクを少なくとも計測可能なトルクセンサ部4を備えるとともに、表示部17と、トルクセンサ部4の性能を示す定格情報(トルクセンサ部情報)が記憶されるRAM31(第1記憶部)とを有して、トルクセンサ部4により計測された計測結果をRAM31に記憶された定格情報に基づいて処理し表示部17に表示するコントロール部13を備える。トルクセンサ部4は、EEPROM9(第2記憶部)を備える。コントロール部13は、操作可能な入力操作部18を備え、入力操作部18を操作することにより、定格情報等(トルクセンサ部情報)をEEPROM9へ書き込み可能に構成されている。
(もっと読む)
回転軸用アキシアル荷重測定装置の検定方法及び検定装置
【課題】使用開始後に、主軸2等の回転軸に加わるアキシアル荷重と、このアキシアル荷重を求める為に設けたセンサユニット7の出力信号との関係を検定する方法及び装置を実現する。
【解決手段】前記主軸2の先端面と、この先端面に対向する部分に設けた保持部材13との間に、荷重測定装置14と、保持ケース15と、複列玉軸受ユニット19等によりこの保持ケース15に回転自在に支持された荷重伝達軸16とを設ける。この荷重伝達軸16に前記主軸2の端部を押し付けつつこの主軸2を回転させた状態で、前記センサユニット7の出力信号を取得する。そして、この出力信号と前記荷重測定装置14の測定値との関係に基づき、この出力信号とアキシアル荷重との関係の適否を判定する。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸に加わるアキシアル荷重を測定するのに、通常運転時には測定値の信頼性を十分に確保でき、しかも、非常時には迅速且つ適切な対応を可能にできる構造を実現する。
【解決手段】演算器14がセンサの出力信号を処理した処理信号を取り出す為に、互いに並列の信号伝達回路15a、15bを設ける。そして、一方の信号伝達回路15aに、カットオフ周波数が低いローパスフィルタ16aを、他方の信号伝達回路15bに、カットオフ周波数が高いローパスフィルタ16bを、それぞれ設ける。通常時には、前記一方の信号伝達回路15aを通過した、第一の処理信号を利用して制御を行い、事故発生時には、他方の信号伝達回路15bを通過した、第二の処理信号を利用して制御又は対応を行う。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸が高速回転する状態での検出分解能及び測定精度の確保と、同じく低速回転する状態での応答性の確保との両立を図る。
【解決手段】演算器は、円周方向に隣り合う1対の凹溝10a、10bに基づいて発生する1対のパルス間の周期である部分周期δと、互いに異なる1対の被検出用特性変化組み合わせ部3a、3aに対応する1対のパルス間の周期である全周期Lとの比であるパルス周期比δ/Lに基づいて、前記主軸の軸方向変位量を求める。この主軸の回転速度が所定値よりも低い場合に、(A)に示す様に、前記全周期Lとして、円周方向に隣り合う1対の被検出用特性変化組み合わせ部3a、3aに関する値Laを採用する。これに対して、前記回転速度が前記所定値以上である場合に、(B)に示す様に、前記全周期Lとして、中間を飛ばして存在する1対の被検出用特性変化組み合わせ部3a、3aに関する値Lbを採用する。
(もっと読む)
軸受装置及び工作機械の主軸装置並びに工作機械
【課題】回転軸に作用するアキシャル荷重を、回転部材から直接、精度よく、且つコンパクトなセンサによって測定することができる軸受装置及び工作機械の主軸装置並びに工作機械を提供する。
【解決手段】回転軸11は、定位置予圧が負荷された一対のアンギュラ玉軸受20、30によって前端が支持され、また後端が円筒ころ軸受40によって回転自在に支持されている。一対のアンギュラ玉軸受20、30の内輪22、32間に配設された内輪間座81の外周面には、被検出面の特性が円周方向に交互に変化するエンコーダ84が設けられている。エンコーダ84の被検出面は、円周方向に関して変化する特性のピッチが、軸方向に関して連続的に変化する部分を軸方向に単列で構成する。また、エンコーダ84の被検出面に対向配置されるセンサ82の検出部90は、被検出面の特性の変化を検出して回転軸11に作用するアキシャル荷重を測定する。
(もっと読む)
工作機械のスピンドル装置
【課題】センサとエンコーダの軸方向相対位置精度のレンジを小さくせずに、部品加工や組立調整の負担を軽減しつつ、荷重を検出する上で必要とされる検出精度を確保することのできる工作機械のスピンドル装置を提供する。
【解決手段】エンコーダ72に対向させたセンサ100の信号によりアキシャル荷重を測定する。エンコーダ72の被検出面には、1対の個性化部分(凹溝)より成る複数組の被検出部が円周方向に等間隔で配置されている。1対の個性化部分は、エンコーダ72の軸方向に対して互いに逆方向に傾斜したハの字状に形成される。切削工具3に設けられた切削部3aの数mをエンコーダ72の被検出面に存在する被検出部の組数nで除した数m/nは、非整数に設定され、且つ、各個性化部分が円周方向に平行な線と交差する傾斜角度は30°〜70°の範囲に設定されている。
(もっと読む)
スラスト力測定器及びこれを使用したスラスト力の測定方法
【課題】ポンプの設置場所や工場の違い等に拘わらず、芯出し作業が不要で、しかもスラスト力の測定ができるスラスト力測定器の提供と、このスラスト力測定器を使用したスラスト力の測定方法を提供する。
【解決手段】スラスト力測定器10は、ポンプ本体1のヘッド1aの一端に固定されたオイルジャケットブラケット2に装着されるアダプタ5と、前記主軸3の一端に装着され、前記主軸3を延長する延長軸6と、前記延長軸6に挿着されたリング状のスラストカラー7gと、前記スラストカラー7gに当接しながら摺動し、スラスト力を測定するセンサ内蔵滑り軸受 7と、前記センサ内蔵滑り軸受 7を支持し、前記アダプタ5に連結されたハウジング8と、を備えたことを特徴とする。
(もっと読む)
荷重測定装置付転がり軸受ユニット
【課題】外輪3とハブ4との間に加わる荷重を、変位センサ等、荷重測定専用の部品を使用せずに測定自在な構造を実現する。
【解決手段】上記ハブ4に、特性を円周方向に関して交互に且つ等間隔に変化させたエンコーダ12を、このハブ4と同心に支持固定する。上記外輪3に支持したセンサ13の検出部を、このエンコーダ12の被検出面に近接対向させる。この被検出面に設けた第一、第二両被検出部の幅寸法は、検出すべき荷重が作用する方向に連続的に変化する。この荷重の変化に伴って、上記センサ13の出力信号が変化するパターンが変わるので、このパターンを観察する事により、上記荷重を求める。上記出力信号は、上記ハブ4の回転速度を求め、ABSやTCSの制御にも利用する。
(もっと読む)
工作機械用荷重測定装置
【課題】極端に処理速度が速い高価なCPUを使用しなくても、複数の切削部22、22を円周方向に関して等間隔に設けた切削工具16を使用する、工作機械の主軸12に加わる荷重の平均値を、精度良く測定できる構造を実現する。
【解決手段】エンコーダ4aの外周面に検出部を対向させたセンサ組立体6cの出力信号の位相に関する情報に基づいて、前記主軸12に作用する荷重を求める。前記エンコーダ4aの被検出面は、円周方向の一部に、特性が円周方向に関して隣り合う部分と異なる複数組の被検出部を、それぞれ測定すべき荷重の作用方向に関して傾斜した状態で、円周方向に関して等間隔に設けている。前記切削工具16に設けられた切削部22、22の数mを、前記エンコーダ4aの被検出面に存在する被検出部の組数nで除した数m/nが、整数でない。
(もっと読む)
位置と負荷の検出可能な流体圧アクチュエータ
【課題】ロッドの変位と当該ロッドに作用する負荷とを1台のセンサで検出できる流体圧アクチュエータを提案する。
【解決手段】ロッド2とピストン3との間に変位に応じた荷重を発生するスプリング4を配置し、ピストンとロッドとにそれぞれマグネット8,9を設け、磁歪式変位センサ7によってピストンとロッドとの軸方向距離及びロッドの軸方向位置を検出する。流体圧を受けてピストン3が移動すると、ロッド2にかかる負荷の大きさに応じてスプリング4が圧縮される。ロッドの負荷はスプリングの圧縮量に関係し、その圧縮量はピストンとロッドとの軸方向距離に比例し、この軸方向距離を変位センサで検出するので、結局、ロッドの負荷を求めることができる。ロッドの位置は変位センサによって直接検出できる。
(もっと読む)
トルク検知装置
【課題】工作機械のラムや工具に加わるトルクが適正なものであるか否かを判断し、過剰なトルクによってラムや工具が損傷してしまう事態を防止することが可能な門形構造を有する工作機械用のトルク検知装置を提供する。
【解決手段】トルク検知装置41は、立形旋盤の状態に応じて許容される切削力を記憶するための許容切削力記憶部26と、現在の立形旋盤の状態より切削力を求め、許容切削力記憶部26の情報と比較し、現状の切削力が許容値を超えているか否かを判定する判定部27と、判定部27による判定の結果、許容切削力を超えていると判定された場合にその事態を報知する報知手段である表示部33とを有している。
(もっと読む)
ボルトの軸力測定方法及びボルトの軸力測定装置
【課題】容易且つ精度良くボルトの軸力を測定することができるボルトの軸力測定方法及びボルトの軸力測定装置を提供することである。
【解決手段】ボルトテンショナー21のピストン26にボルト12をねじ結合して連結し、その圧力室27に油圧を供給して、ボルト12に必要ボルト締結軸力以上の引っ張り力を加えて伸長させる。ボルト12の伸長により被締結部材14から離れたナット13を被締結部材14に再度着座させ、次いで、圧力室27の油圧を開放してボルト12の引っ張り力を解除する。油圧が開放された圧力室27の圧力変化を圧力センサ33により検出し、測定器41により、この検出された圧力変化において変化率が急激に低下する点を特異点として検出し、その特異点における圧力室27の圧力値に圧力室27の受圧面積を乗じて、ボルト12の軸力を算出する。
(もっと読む)
1 - 20 / 65
[ Back to top ]