
Fターム[2F051AA21]の内容
特定の目的に適した力の測定 (5,882) | 用途 (1,694) | 電気部品、電気機器 (157)
Fターム[2F051AA21]の下位に属するFターム
Fターム[2F051AA21]に分類される特許
1 - 20 / 102
検出装置、電子機器及びロボット
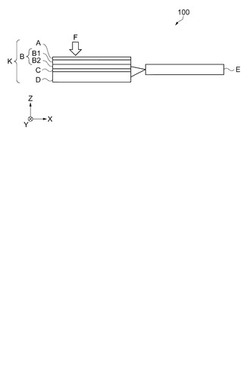
【課題】物体に作用する外力の方向及び大きさという力覚情報、及び外力が作用した物体の静止または滑りという滑り覚情報の複合情報を検出可能な検出装置を提供する。
【解決手段】検出装置100は検出部K及び演算部Eを有し、検出部Kでは外力が作用する側から順に、弾性基板Aと、感圧導電シート及び感圧導電シートの抵抗値を検出する一対の電極を有する滑り検出部Bと、剛性基板Cと、基準点の回りに複数配置された圧力センサーを有する第1基板及び外力によって先端部が第1基板に当接した状態で弾性変形する弾性体突起が形成された第2基板を有する外力検出部Dとが積層されている。検出装置100は、滑り検出部Bで物体の静止または滑りという滑り覚情報と、外力検出部Dで作用した外力の方向及び大きさという力覚情報とを同時に検出することができる。
(もっと読む)
フィルムセンサ

【課題】視認性に優れると共に誤作動の発生を防止することができ、加えて優れた帯電防止性を発揮することで長期に亘って表示不良を防止することができるフィルムセンサを提供する。
【解決手段】フィルムセンサ1は、偏光フィルム2と、帯電防止層3と、静電容量センサ4とを、この順に備えている。静電容量センサは、透明フィルム5と、該透明フィルムの一方の側に形成された透明電極パターン6と、該透明電極パターンを埋設するように透明フィルム5の一方側に形成された接着層7とを有している。帯電防止層3は、偏光フィルム2と透明フィルム5との間に配置されており、且つ透明フィルム5に合着されている。この帯電防止層3の表面抵抗値は、1.0×109〜1.0×1011Ω/□である。
(もっと読む)
検出装置、電子機器およびロボット
【課題】力の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器およびロボットを提供する。
【解決手段】力の方向と大きさとを検出する複数の検出領域を有する第1基板と、基準点と重なる位置に重心が位置するとともに、力によって頂部が検出領域に当接した状態で弾性変形する弾性体突起が配置された第2基板とを備え、検出領域と、その隣り合う検出領域との間に検出領域が配置された第1基板面を基部として突き出す突起体を備える。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外力の有無を高速に検出し、且つ、外力の方向と大きさとを高い精度で検出する事が可能な検出装置、電子機器、及びロボットを提供する。
【解決手段】外力の有無を検出する第一機構31と、外力の大きさと方向とを検出する第二機構32と、を備え、第二機構32が形成される部位は窪んでいる。
(もっと読む)
回転検出装置、検出装置、電子機器及びロボット
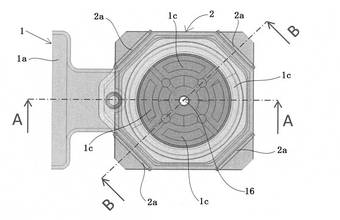
【課題】回転力の方向と大きさを高感度で検出する事が可能な回転検出装置、電子機器及びロボットを提供する。
【解決手段】回転軸4に対する外力の回転方向と大きさとを検出する回転検出装置100であって、第一基板11には基準点Pの回りに圧力センサー2が複数個設けられ、第二基板12には基準点Pと重なる位置、先端部が第一基板11に当接した状態で外力Fによって弾性変形する弾性体突起3が設けられている。第一基板11は回転軸4に対して固定されており、第二基板12は回転軸4に対して回転可能である。第二基板12に回転力が付加されると、弾性体突起3は圧縮変形し、複数の圧力センサー2で異なる値の圧力値が検出される。これらの圧力値に基づいて、高い精度で回転力の方向と大きさとを検出する。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及び
ロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する円錐台もしくは角錐台形状である弾性体突起22が形成された第2基板20とを備える。
(もっと読む)
入力インターフェイス装置
【課題】簡単に、外部機器に対して、複数のレベルの信号を任意に出力可能な入力インターフェイス装置を提供する。
【解決手段】入力インターフェイス装置は、表裏方向のばね定数が異なる複数の弾性層20、21が表裏方向に積層されてなる弾性部2を備え、表側から加わる荷重Fの変化による弾性部2の全体の表裏方向の圧縮荷重−変位特性が非線形であることを利用して、外部機器に対して、複数のレベルの信号を任意に出力可能とする。
(もっと読む)
圧力センサ
【課題】感圧導電シートの導電性粒子の添加量を増加させることなく感度の良い圧力センサ1を提供する。
【解決手段】絶縁性基材2と、絶縁性基材2の一方主面に設けられた有機トランジスタ10と、有機トランジスタ10のソース電極12に所定電圧を印加する電圧電源30と、電圧電源30とソース電極12との間に設けられ、ソース電極12と直列に接続された感圧導電体20と、感圧導電体の一方主面側に積層された押圧シート60とを備え、感圧導電体20と押圧シート60とは少なくとも一部(凹部62)を非接触とし、他の部分(凸部61)を接触させた圧力センサ1を提供する。
(もっと読む)
タッチパネルの容量検出回路、容量検出方法、およびそれを用いたタッチパネル入力装置、電子機器
【課題】容量検出回路のノイズ耐性を改善する。
【解決手段】送信回路20は、複数の容量センサ51〜mそれぞれの送信電極10に周期的な送信信号を印加する。受信回路26は、各容量センサ51〜mの容量変化を示すデジタル値Ds1〜mを、対応する受信電極121〜mに発生する受信信号IRXにもとづいて生成する。制御部50は、複数の容量センサ51〜mに対応して生成された複数のデジタル値Ds1〜mに応じて、ノイズの影響の有無を判定する。
(もっと読む)
力検出装置
【課題】簡素且つ安価な構成で小型化・薄型化が容易でありながらも汎用性の高い力検出装置を提供する。
【解決手段】力検出装置1は、静電容量検出用の固定電極30と、固定電極30に対向して配置される可動電極22と、固定電極30と可動電極22の間において可動電極22と略接触した状態で配置される絶縁層10と、可動電極22を絶縁層10に沿って移動または回転可能に支持する支持部24と、を備えている。
(もっと読む)
力覚センサチップ
【課題】陽極接合の際に、陽極接合の不具合や、センサ回路の損傷が起きない力覚センサチップを提供する。
【解決手段】外力作用領域部4Aを有する作用部4と、この作用部4を支持する支持部3と、作用部4と支持部3とを連結する連結部と、を備える半導体基板からなるベース部材2と、連結部の変形発生部に設けられた歪み検出用抵抗素子Sと、を備え、作用部4の表面又は作用部4が形成された面の裏面に、陽極接合する際に電流が供給される電極である陽極接合用電極8が配置されていることを特徴とする。
(もっと読む)
押圧式入力装置
【課題】過荷重が加えられる場合でも、荷重センサの破損を防止すること。
【解決手段】操作荷重に応じた信号を出力する荷重センサ(4)と、操作荷重が加わる一端側から荷重センサ(4)に当接する他端側に延在し、延在方向の途中部分を支点として荷重センサ(4)に対して操作荷重を伝える腕部材(3)と、腕部材(3)に対向して配置され、腕部材(3)を揺動可能に係止するベース部材(2)と、腕部材(3)の一端側を操作荷重の作用方向に対して逆方向に押圧し、支点を介して荷重センサ(4)に初期荷重を生じさせる片持バネ(22)とを備え、一端側において腕部材(3)に加えられた操作荷重は、支点を介して他端側において腕部材(3)に対し荷重センサ(4)の初期荷重を減少させる方向に力を作用させるように構成した。
(もっと読む)
燃料電池システム
【課題】コンパクト且つ経済的な構成で、良好な密着性を確保して燃料電池スタック内の面圧分布を高精度且つ確実に測定することを可能にする。
【解決手段】燃料電池システム10を構成する静電容量型面圧測定装置14は、発電セルの発電面内に位置して設けられる複数の誘電体50と、前記発電セルの発電面方向に沿って延在するとともに、前記誘電体50間に積層方向に向かって電流を流す格子状導電部52とを備える。格子状導電部52は、各格子交差部68で一体化される複数の第1板状部64及び複数の第2板状部66を有し、少なくともいずれかの前記格子交差部68に肉薄な薄肉部位70が設けられる。
(もっと読む)
静電容量式センサー及びその製造方法
【課題】 本発明の目的は、静電容量を変化させるセンサーの複数に分割された各可動電極部の上面部を除いて非導電性のラバー又はエラストマーを使用し、ラバー又はエラストマー本来の特性を活かしつつラバー又はエラストマーの繰り返し操作に対する変形防止を図るとともにセンサー基板を含めたセンサー構成部材のそれぞれの中心位置に位置決め用穴の形成と、円周方向等のXY平面上の位置ずれを防止し、分割された各固定電極部区域での出力電圧のずれが生じないようにし、各センサー構成部材の中心位置で位置決めした状態で前記センサーを内部に収納し、該センサー上面と間隔をおいて配設したキーバッドラバーの周縁をレーザー光線により一体に固定する構造に形成することにより、操作性が良く、ラバーの復帰性能の向上を図ることができ、力または加速度変化に対する静電容量の変化を出力電圧として安定した状態で出力信号を検出することが出来、安定したセンサー機能を発揮し、かつ耐久性に優れた静電容量式センサー及びその製造方法を提供することにある。
【解決手段】円周方向に複数に分割された固定電極部を備えたセンサー基板と、該各固定電極部とそれぞれ対向する位置に設けた可動電極部を除いた部位を非導電性ラバー又は非導電性エラストマーで形成したセンサーラバーと、該センサーラバーの上面と間隔をおいて上方に配置するキーパッドラバーとが、各中心部の位置決めと各円周方向、又は矩形方向のXY平面上で位置決めをして一体に形成したことを特徴とする静電容量式センサー。
【選択図面】 図1
 (もっと読む)
(もっと読む)
加圧力検出工具
【課題】固定側電極及び可動側電極による被溶接部材の加圧力を容易にかつ確実に検出することのできる加圧力検出工具を提供する。
【解決手段】第1溶接電極132及び第1溶接電極132に隣接して被溶接部材に当接する制御加圧部134と、第1溶接電極132と対向して被溶接部材に当接する第2溶接電極133とによって被溶接部材を挟持加圧し、挟持加圧状態で第1溶接電極132と第2溶接電極133との間で通電してスポット溶接するスポット溶接装置130の加圧力を検出する加圧力検出工具10であって、第1溶接電極132側から制御加圧部134が当接する当接範囲R1を有するベース部21、ベース部21の当接範囲R1側に設けられて第1溶接電極132の加圧力を検出する第1加圧力センサ30、第1加圧力センサ30に対してベース部21を介在してベース部21に設けられて第2溶接電極133の加圧力を検出する第2加圧力センサ31を備える。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い感度で且つ再現性良く検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの回りに複数配置された圧力センサー12、を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22、が形成された第2基板20と、を備え、弾性変形する弾性体突起22は、互いに張力で影響しあう弾性体で接合されている。
(もっと読む)
燃料電池システム
【課題】燃料電池スタック内の面圧分布を高精度且つ確実に測定することができ、高性能な燃料電池スタックを得ることを可能にする。
【解決手段】燃料電池システム10を構成する静電容量型面圧測定装置14は、発電セルの発電面内に位置して設けられる複数の誘電体50と、前記発電セルの発電面方向に沿って延在するとともに、前記誘電体50間に積層方向に向かって電流を流す導電部52と、前記誘電体50を前記積層方向両側から挟持する長尺状の第1電極54及び第2電極56と、前記第1電極54及び前記第2電極56の外側にそれぞれ絶縁部材58a、58bを介装して積層される長尺状の第1シールド部材60及び第2シールド部材62とを備える。
(もっと読む)
押圧式入力装置
【課題】過荷重が加えられる場合でも、荷重センサの破損を防止することができ、荷重センサのセンサ感度を容易に調整すること。
【解決手段】操作パネル6からの操作荷重に応じた信号を出力する荷重センサ4と、操作荷重が加わる一端側から荷重センサ4に当接する他端側に延在する当接プレート5と、当接プレート5の延在方向に沿って延在し、当接プレート5の他端側を介して荷重センサ4に初期荷重を生じさせる片持ばね14と、当接プレート5を揺動可能に支持し、当接プレート5の一端側に加えられた操作荷重により、当接プレート5の他端側に対し荷重センサ4の初期荷重を減少させる方向に力を作用させる支持部材2とを備え、片持ばね14の延在方向に沿う両側方において、当接プレート5が支持部材2に支持される構成とした。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外圧の有無を高速に検出し、かつ外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器、及びロボットを提供する。
【解決手段】圧力の有無を検出する接触センサー12と、圧力の大きさと方向とを分離する圧力成分分離機構と、を備えた検出部と、接触センサー12の検出結果に基づいて圧力成分分離機構の検出動作を制御する制御部と、を有する。
(もっと読む)
検出装置、電子機器及びロボット
【課題】耐久性に優れ外圧の方向と大きさを高い精度で検出することが可能な検出装置、
電子機器及びロボットを提供することを目的とする。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と
、基準点Pと重なる位置に略中心が位置するとともに外圧によって弾性変形する略半球状
の弾性体突起21と、弾性体突起21を隔てて第1基板10の反対側に設けられた第2基
板30と、を備える。
(もっと読む)
1 - 20 / 102
[ Back to top ]