
Fターム[2F051DB03]の内容
特定の目的に適した力の測定 (5,882) | 測定できるモーメント成分の数 (190) | 3分力 (119)
Fターム[2F051DB03]に分類される特許
1 - 20 / 119
センサー素子、力検出装置およびロボット
【課題】高い感度の力検出を可能とするセンサー素子と、そのセンサー素子を用いたセンサーデバイスおよび力検出装置と、その力検出装置を備える高い信頼性と安全性を有するロボットを提供する。
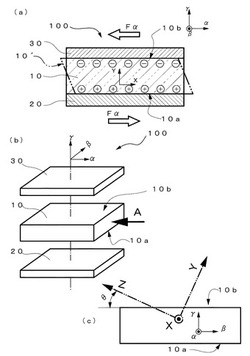
【解決手段】三方晶系の単結晶より形成された圧電基板と、前記圧電基板の一方の基板面に配置される第1電極と、他方の基板面に配置される第2電極と、を備えるセンサー素子であって、前記圧電基板の前記基板面は、結晶軸のX軸(電気軸)を含み、前記基板面と、前記結晶軸の前記X軸(電気軸)とZ軸(光軸)とを含む面と、により成す角度θが、0°<θ<20°であるセンサー素子。
(もっと読む)
センサー素子、センサーデバイス、力検出装置およびロボット

【課題】3軸方向の力に対する検出能力に大きな差が出ない力検出装置と、その力検出装置を実現するセンサー素子を提供する。
【解決手段】非圧電性および非導電性を有する基板の少なくとも一方の面に圧電性被膜が形成された圧電体と、導電性を有する電極基板と、を有し、前記基板と前記電極基板との間に前記圧電性被膜が配置されるセンサー素子。
(もっと読む)
触覚センサ及び多軸触覚センサ
【課題】薄形でせん断力を計測することができる触覚センサ及び多軸触覚センサを提供する。
【解決手段】多軸触覚センサ1は、基板6の表面と略同一の面内に設けられたセンサ素子2と、前記センサ素子2の周囲を覆い、当該センサ素子2に外力を伝達する外装材42とを備える。前記センサ素子2は、少なくとも一端が前記基板6に支持される可撓性の梁7(8)を有する。前記センサ素子2は、前記基板6の表面に対し平行方向の前記梁7(8)の変形を検出する。
(もっと読む)
センサ
【課題】物体に作用する力を検出する新規な構造のセンサを提供する。
【解決手段】センサ1は、対向して設けられたベース2、テーブル3と、これらの間を連結するパラレルリンク機構4とを備えている。パラレルリンク機構4の各リンク機構5は、ロッド部9とアーム部6とを有して構成されている。ベース2、テーブル3よりも剛性が低く、弾性変形するアーム部6は、ベース2で片持ち支持されている。ベース2、テーブル3よりも剛性が低く、弾性変形するロッド部9は、一端がアーム部6と直接接続され、他端がテーブル3と直接接続されている。このセンサ1は、アーム部6の変形を検出する歪み計11を備えている。
(もっと読む)
6軸力計測装置、及び6軸力計測方法
【課題】製作や小型化が容易であり、物体との接触面に柔軟性を持ち、更に柔軟素材が持つ複雑な応力歪み特性に依存せずに6軸力の計を測可能とする6軸力計測装置及びそのシステムを提供する。また、他の光学式触覚センサへ応用し、光学式触覚センサ自体の機能を失わずに同時に6軸力の計測が可能になるような、力学量計測装置及びそのシステムを提供する。
【解決手段】6軸力計測装置1は、タッチパッド3の他に、形状抽出手段としてのCCDカメラ4及び照明5と、圧力抽出手段としての圧力センサ10あるいは圧縮性流体19及び箱20を備える。CPU15は、CCDカメラ4によって撮影された画像から膜6の形状及び膜6の端に作用する張力の方向を抽出し、膜6の形状から物体W1が膜6に接触していない非接触領域を抽出する。さらに、CPU15は圧力センサ10からのアナログ信号を入力し、液体11の圧力を抽出する。最後にCPU15は、これらの情報から板7に作用する(任意の軸方向の力及びモーメント)6軸力を抽出する。
(もっと読む)
力検出装置
【課題】簡素且つ安価な構成で小型化・薄型化が容易でありながらも汎用性の高い力検出装置を提供する。
【解決手段】力検出装置1は、静電容量検出用の固定電極30と、固定電極30に対向して配置される可動電極22と、固定電極30と可動電極22の間において可動電極22と略接触した状態で配置される絶縁層10と、可動電極22を絶縁層10に沿って移動または回転可能に支持する支持部24と、を備えている。
(もっと読む)
多軸力検出器
【課題】異なる方向に作用する複数の荷重やモーメントを同時に検出する多軸力検出器であって、大きく作用する荷重と小さく作用する荷重やモーメントを共に精度よく検出できる多軸力検出器を提供する。
【解決手段】荷重受け部100と、荷重受け部の中心を交点とする互いに直交する2方向に延びた柱状感度部200と、柱状感度部の各側面に貼着されたひずみゲージ300と、柱状感度部と繋がる平板状のフレクシャ400と、フレクシャと繋がる枠体500と、から構成される多軸力検出器であって、2方向に延びた柱状感度部の断面積の一方が、他方の断面積より小さくなっている。
(もっと読む)
力検出装置、自動ねじ締め装置および把持装置
【課題】 離れた距離の対象物から力センサに入力される外力を減衰することができる力検出装置を提供することを目的とする。
【解決手段】 外力を検出する力センサと、力センサに外力を減衰させて入力する減衰機構を備えた力検出装置であって、減衰機構は、力センサの入力部に設けられた伝達部材と、一端が力センサの固定部に設けられた支持部材と、支持部材の他端に枢動可能に支持された可倒軸とを備え、可倒軸は伝達部材に屈曲可能に接続されている。
(もっと読む)
力覚センサチップ
【課題】陽極接合の際に、陽極接合の不具合や、センサ回路の損傷が起きない力覚センサチップを提供する。
【解決手段】外力作用領域部4Aを有する作用部4と、この作用部4を支持する支持部3と、作用部4と支持部3とを連結する連結部と、を備える半導体基板からなるベース部材2と、連結部の変形発生部に設けられた歪み検出用抵抗素子Sと、を備え、作用部4の表面又は作用部4が形成された面の裏面に、陽極接合する際に電流が供給される電極である陽極接合用電極8が配置されていることを特徴とする。
(もっと読む)
力覚センサ
【課題】各軸の相互間の干渉による検出誤差を小さくし、対象とする力及びモーメントを高精度で検出できる力覚センサを提供する。
【解決手段】力覚センサ100は、台座部材101と、台座部材101に相対して配置され、外力が作用して変位する作用部材102と、作用部材102の変位を検出する変位検出部とを備えている。また、力覚センサ100は、台座部材101に相対して配置された剛性部材103を備えている。更に、力覚センサ100は、台座部材101に対して垂直方向に延び、軸線Lまわりに等間隔に配置され、台座部材101と剛性部材103とを連結する柱状弾性部材105a〜105dを備えている。更にまた、力覚センサ100は、軸線Lまわりに等間隔に配置され、作用部材102と剛性部材103とを連結する弾性部104A〜104Dを備えている。各弾性部104A〜104Dは、水平方向に延びる一対の梁状弾性部材からなる。
(もっと読む)
力覚センサ、ロボット装置、ロボットハンド及び検出装置
【課題】温度センサを用いずに、磁石及び磁電変換素子の特性の変動に追従して、磁電変換素子の出力電圧を補正する。
【解決手段】外枠3に弾性体2を介して作用部1が支持されている。この作用部1に外力が作用することにより作用部1が外枠3に対して変位する。外枠3の内部には、外枠3に一体に固定された永久磁石8が配置されている。この永久磁石8の一方の磁極面8aに対向するようにn個の第1のホール素子6a〜6dが配置されている。また、永久磁石8の他方の磁極面8bに対向するようにn個の第2のホール素子9a〜9dが配置されている。各ホール素子6a〜6dには、定電流源及び電圧検出部が接続されている。そして、各電圧検出部により検出されたホール電圧の電圧値の絶対値の総和の電圧値が求められ、総和の電圧値が予め定めた基準電圧値となるように、各定電流源の電流値が調整される。
(もっと読む)
センサー素子、センサーデバイス、力検出装置およびロボット
【課題】正確な力を測定することができるセンサー素子と、そのセンサー素子を用いたセンサーデバイスを提供する。
【解決手段】対向配置される第1電極と、前記第1電極に挟持される2以上の圧電体と、前記圧電体の各々に挟持され、積層される第2電極と、を備えるセンサー素子であって、前記圧電体は、前記第2電極に対向する面に、第1溝部を有し、前記第2電極は、前記圧電体の前記第1溝部に嵌合する第1凸部を有し、前記第1凸部表面は、電気的な絶縁性を備えているセンサー素子。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供すること。
【解決手段】誘電性の弾性材からなる誘電体層20の両面に対して導電性の弾性材からなる一対の電極膜22,22を設けた静電容量型センサ18が、第1の取付部材12と第2の取付部材14の間への外力作用に際しての本体ゴム弾性体16への引張力の作用方向に伸びる状態で配設されて、本体ゴム弾性体16に固着されている。
(もっと読む)
3軸力センサを用いて力制御をおこなうロボットの制御装置
【課題】3軸力センサによっては検出できない力およびモーメントを推定する。
【解決手段】ツール(4)およびワーク(W)の一方に対して他方をロボット(1)の手先部によって相対的に移動させ、ツールとワークとの間に作用する力を制御するロボット制御装置(11)は、1軸方向の力と、該1軸に直交で且つ互いに直交する2軸方向の軸回りのモーメントとを検出する力検出部(3)と、ツール(4)とワーク(W)との間に作用する力を推定するための力推定用点を設定する力推定用点設定部(12)と、力検出部により検出した1軸方向の力および2軸方向の軸回りのモーメントと、力推定用点設定部により設定された力推定用点の位置とに基づいて、前記2軸方向の力またはさらに前記1軸回りのモーメントととを推定する力推定部(13)と、を備える。
(もっと読む)
力覚センサ
【課題】多数のセンサを必要とすることなく、センサのための配線簡単化も容易である力覚センサを実現する。
【解決手段】第1の本体部A1および第2の本体部A2と中間体Bとの間に弾性連結部9a〜9c、10a〜10cを設ける。これにより、本体部A1、A2を中間体Bを介して相対移動可能に連結し、第2の本体部A2に作用する外力の6方向の成分を、センサ基板13に搭載された検出電極14a〜14c、15a〜15cによって検出する。本体部A2に支持されたセンサ基板13のみに検出電極が設けられるため、中間体Bや本体部A1にまたがって複雑な配線を施す必要がない。
(もっと読む)
力覚センサ
【課題】小型化及び低コスト化を図る。
【解決手段】第1の固定部A1のセンサ支持体5に受光素子を有するセンサ基板11が設けられている。第2の固定部A2は、外力の作用によりセンサ支持体5に対して変位する。第2の固定部A2の円筒部材6と、センサ支持体5とが弾性連結部7a,7b,7cで連結されている。第2の固定部A2の変換部材取付板3とセンサ支持体5との間には、変位方向変換部材10a,10b,10cが配置されている。各変位方向変換部材10a,10b,10cは、センサ支持体5に対する第2の固定部A2の垂直方向の変位によってセンサ支持体5に対して水平方向に変位する中間端部23を有している。そして、センサ基板11の各受光素子に対向するように、中間端部23の下面にスケール34a,34b,…が設けられている。
(もっと読む)
タイヤ試験機に用いられる多分力計測スピンドルユニットの校正方法
【課題】スピンドル軸芯方向に沿って離れた位置に2つの多分力計測センサを備えた多分力計測スピンドルユニットにおいて、タイヤに作用する実荷重を求める際に用いる変換行列を確実に校正することができ、校正された変換行列を用いることで、タイヤに発生する並進荷重およびモーメントを精度よく算出する。
【解決手段】本発明に係る多分力計測スピンドルユニット1の校正方法は、スピンドル軸4に作用する荷重を計測する「計測工程」と、この計測工程で得られた計測荷重ベクトルとこの計測荷重ベクトルに作用する変換行列Eとを用いて、タイヤTに働く実荷重ベクトルを求める「算出工程」と、この算出工程に先立って、複数の一次独立な試験条件の基で計測荷重ベクトルを計測し且つ得られた計測荷重ベクトルを基に変換行列Eを校正する「校正工程」を有している。
(もっと読む)
力覚または運動センサ
【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】本発明による力覚または運動センサにおいては、センサを保持し固定するためのベース1と、6自由度方向の応力に感応するよう構成され前記ベースと対向して配置されたテーブル30と、前記ベースと前記テーブルとの間に配置され前記応力に対応して動作する動作部と、前記動作部の変位及び/または変形を検出する複数の検出素子と、前記各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、前記動作部は放射状に配置された複数の感応アーム10と、これらアームと一体化されたアームより厚いボス部25とからなる。
(もっと読む)
力覚センサの校正方法
【課題】エンドエフェクタを交換せずに、力覚センサをアームの先端に装着したままで校正できる簡易な力覚センサの校正方法を提供すること。
【解決手段】一方のロボット101の力覚センサ1が校正済みで、他方のロボット102の力覚センサ2が校正対象である。まず、一対のロボット101,102のハンド3a,3b同士を当接させる(当接工程)。当接工程の実行による一方のロボット101の校正済みの力覚センサ1の検出信号を力又はモーメントを示す測定値に変換する(測定工程)。測定工程で得られた測定値に基づき、当接工程により反作用によって他方のロボット102のハンド3bに作用している力又はモーメントを示す値を求める(算出工程)。当接工程で他方のロボット102の校正対象である力覚センサ2が出力した検出信号が、算出工程で得られた力又はモーメントを示す値と同一の値に変換されるように、変換データを更新する(校正工程)。
(もっと読む)
車軸6分力計角度検出器の支持機構
【課題】 スリップリングに組み込まれた角度検出器を車体との間で基準座標系を保持し、転舵による角度変化に対する誤差を無くし、精度の向上を図る。
【解決手段】 車軸6分力計7は、ハブアダプタ5を介して、ホイールハブ4とホイール6との間に配設され、車輪から加わる外力を受けて、X、Y、Z軸方向の分力および各軸回りのモーメントに対応する信号を出力する。スリップリングの支持機構9は、X軸方向に平行移動する第1、第2の平行四辺形リンク10、12、これらをY軸方向に移動可能とする第1、第2の回転ジョイント11、13、第2の回転ジョイント13とスリップリング8との間のZ軸を中心とした相対回動を可能とする第3の回転ジョイント14からなっている。
(もっと読む)
1 - 20 / 119
[ Back to top ]