
Fターム[2F062AA01]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 位置、変位、移動量、座標 (911)
Fターム[2F062AA01]の下位に属するFターム
一次元 (264)
二次元 (66)
三次元 (319)
定位置 (1)
端部位置 (10)
移動方向に垂直な方向の変位 (11)
穴、突起の位置 (5)
中心、図心、重心、中点 (34)
円の中心位置、偏心量 (32)
摩耗量 (8)
Fターム[2F062AA01]に分類される特許
1 - 20 / 161
表面性状測定機
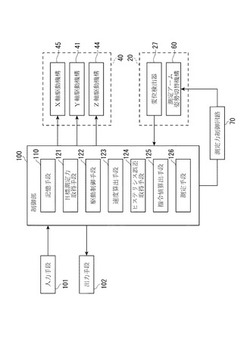
【課題】測定アームに最適な測定力を発生させる表面性状測定機を提供する。
【解決手段】表面性状測定機は、ブラケットに回転軸を支点として円弧運動可能に支持される測定アーム、測定アームの先端に設けられたスタイラス、及び、測定アームを円弧運動方向へ付勢するボイスコイルを備え、スタイラスに測定力を付与する測定アーム姿勢切替機構60を備えるスタイラス変位検出手段20と、制御部100と、を具備し、制御部100は、ヒステリシス誤差を取得するヒステリシス誤差取得手段124と、目標測定力を取得する目標測定力取得手段121と、目標測定力及びヒステリシス誤差に基づいて、測定力指令値を算出する指令値算出手段125と、測定力指令値に基づいてボイスコイルに電流を入力する駆動制御手段122と、を備える。
(もっと読む)
位置計測装置及び位置計測システム

【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
触針式測定装置
【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
測定装置、測定方法、タッチプローブおよびキャリブレーションゲージ
【課題】被測定物の凹部を測定できない事態の発生を極力回避することができる測定装置を提供する。
【解決手段】被測定物設置体219と、筐体215に回転自在に設けられているスピンドル217とを具備したヘッド213と、スピンドル217に一体的に設置されるハウジングと測定子61を具備するスタイラス60とを備えハウジングがスピンドル217に設置されたときに測定子61がスピンドル217の回転中心軸Cから離れているタッチプローブ60と、を有し、スピンドル217に設置されている設置済みタッチプローブ60をインデックス位置決めした状態で、筐体215を被測定物設置体219に対して相対的に移動し、被測定物設置体219に設置された設置済み被測定物の形状を測定するように構成されている被測定物の測定装置201である。
(もっと読む)
工作機械
【課題】工作機械において、プローブの取り付けられた主軸を回転させてワークの計測を行う際の主軸の回転微振動を抑制し、計測精度を向上させる。
【解決手段】タッチプローブ17の取り付けられる主軸30と、主軸30を回転駆動するモータ15と、モータ15の回転角度位置を検出する回転角度位置検出器16と、制御装置20とを含み、制御装置20は、タッチプローブ17によってワークの測定を行う測定モード指令が入力された際に、d軸電流指令補正部4によってd軸電流指令値Idcに1より小さいd軸電流補正係数Kを乗じてd軸電流指令値Idcをd軸電流指令補正値Idc‘に低減する。
(もっと読む)
モジュラー測定プローブ
【課題】ベースモジュール(20、120)に取り付けできるスタイラスモジュール(22、122)を備えるタッチトリガプローブなどの測定プローブを提供すること。
【解決手段】スタイラスモジュール(22、122)は、筺体と、筺体に移動可能なように取り付けられているスタイラスホルダ(24、132)とを備える。ベースモジュール(20、120)は、筺体に対するスタイラスホルダ(24、132)の移動を示す測定データを生成するための測定部(36、124)を備える。スタイラスモジュール(22、122)は、内蔵故障モードを有し、それによって、実質的な所定の稼働寿命を有する。一実施形態では、内蔵故障モードは、バッテリ(34)をスタイラスモジュール(22)内に一体化することによって実行される。また、スタイラスモジュール(122)の構成要素が、特定の量の使用後に、その内部で突発的に機能しなくなる機械的故障モードを実行することもできる。
(もっと読む)
眼鏡枠形状測定装置
【課題】高カーブフレームの精度の良い測定を可能にし、型板測定においても型板トレースの精度の向上を図ることが可能な眼鏡枠形状測定装置を提供する。
【解決手段】測定子281が取り付けられた測定子軸282を傾斜可能に保持する保持ユニット250と、測定子軸の傾斜角度を検知する手段と、XY移動手段と、Z方向の軸を中心に回転する回転手段265と、を有する測定ユニットを備え、型板測定モード時に、測定子軸の背面を型板のエッジに接触させるように回転手段及びXY移動手段を制御する制御手段と、保持ユニットのXY方向の位置情報、回転手段の回転情報及び傾斜角の検知情報とに基づいて型板の動径情報を求める演算手段と、を備え、制御手段は、型板の測定途中では、測定済み情報に基づき、測定子軸の背面が型板のエッジに接触したときに測定子軸の傾斜が垂直を維持するように、回転手段及びXY移動手段を制御する。
(もっと読む)
偏心測定装置
【課題】測定子を径方向とこれと垂直な方向の2方向に移動可能とすることでポケットギアも検査可能な偏心測定装置を提供する。また、歯溝の平行度を検査可能な偏心測定装置を提供する。
【解決手段】偏心測定装置50によれば、測定子34を径方向(X軸方向)とこれと垂直な方向(Z軸方向)の2方向に移動する。これにより、歯溝の外側に外壁が形成されたポケットギアの検査も問題なく行うことができる。また、測定子34が2方向に移動するため、歯溝の平行度の検査と偏心度の検査とを一つの測定子34で連続して行うことができる。
(もっと読む)
抵抗値と変位を測定する複合測定装置
【課題】一台で高抵抗薄膜の抵抗値と表面凹凸を正確に測定できる測定装置を提供する。
【解決手段】載置板12をポリアセタール樹脂で構成し、裏面にガード電極52を配置する。載置板12上に配置した基板23の表面に、円環電極43と円盤電極44とを接触させ、円盤電極44を電流計47を介してガード電極52に接続し、ガード電極52を接地させて、円環電極43と円盤電極44の間に電圧を印加し、電流計47の検出結果から基板23表面の高抵抗薄膜の抵抗値が測定される。ポリアセタール樹脂の抵抗値は高く、表面は平坦なので、基板23の表面に触針を接触させながら移動させて、触針63の変位を測定して基板23の表面の凹凸も正確に測定することができる。
(もっと読む)
エアギャップ測定装置および方法
【課題】電動機のエアギャップ測定装置において、電動機の種類に関係なくエアギャップの偏心量および方向を精度よく計測することができるとともに、エアギャップの偏心状態のデータを基にエアギャップを調整することができる電動機のエアギャップ測定装置を提供する。
【解決手段】あらかじめモータ主軸とロータ外径の位置関係を測定しておき、ステータ内径測定装置10によりステータの内径を測定する。また、ロータ組み込み後の主軸軸心測定装置により主軸の軸心を測定することで、測定したステータ内径と軸心の位置関係よりエアギャップを算出する。さらに、ロータ回転時のエアギャップの変化も判定できる。
(もっと読む)
フローティング装置及びそれを用いたアクチュエータ
【課題】測定子やロボットチャックの位置調整を行う際に、多少の位置ずれが生じていても、測定や組み付けを滞りなく行うことを可能とするフローティング装置を提供する。
【解決手段】一方の面の中央に突出した棒状の固定軸3を有する板状の取付け部材2と、固定軸3の外周に被嵌され、基部が取付け部材2に弾性部材を介して固定された円筒体4と、固定軸3の外周と円筒体4の内面間に介在して円筒体4を弾性的に保持するエアパッド5と、を有するフローティング装置1。
(もっと読む)
表面粗さ測定装置
【課題】測定開始時間を短縮化できるとともに、測定範囲が狭い部位も測定可能な表面粗さ測定装置を提供する。
【解決手段】ピックアップ16を移動させるための駆動装置18A〜18Cが複数備えられた表面粗さ測定装置10において、駆動装置18A〜18Cごとに測定待ち時間が設定される。駆動装置18A〜18Cの一つがデータ処理部14に接続されると、接続された駆動装置18A〜18Cが特定され、その駆動装置18A〜18Cに設定された測定待ち時間の情報が読み出される。測定時は、ピックアップ16の移動直後の測定データは使用せず、測定待ち時間の経過後に得られる測定データに基づいて表面粗さの測定が行われる。
(もっと読む)
形状測定方法
【課題】先端の曲率半径が小さいプローブを用いても、プローブで発生する誤差を好適に検出および補正することができる形状測定方法を提供する。
【解決手段】プローブを備えた接触走査式の形状測定センサを用いて被検物の表面形状を測定するための形状測定方法は、形状測定センサにより、被検物の中心軸を通る一断面における表面形状の点列データを取得する点列データ取得工程S40と、点列データから誤差を除去する誤差除去工程S50とを備え、誤差除去工程において、プローブの先端と被検物の表面との接触に伴う力によるプローブ先端部の変位に関する理論モデルを点列データに当てはめてプローブ変位誤差を取得し、プローブ変位誤差を点列データから除去することを特徴とする。
(もっと読む)
三次元測定機
【課題】常に高精度な補正パラメータを算出できる三次元測定機を提供する。
【解決手段】三次元測定機を構成する補正パラメータ算出装置10は、測定子211Aに当接する当接面611を有し、当接面611に測定子211Aが当接することで測定子211Aの中心を回転中心とする回転変位を拘束することなく測定子211Aの並進変位を拘束する拘束手段6と、駆動機構の動作を制御してプローブを移動させることで、当接面611に近接する方向に測定子211Aを移動させる移動制御手段と、プローブの移動量、及び駆動機構の移動量を取得する情報取得手段と、情報取得手段にて取得されたプローブ21の移動量、及び駆動機構の移動量に基づいて、補正パラメータを算出する補正パラメータ算出手段とを備える。当接面611は、測定子211Aが当接した際に測定子211Aと1点で点接触する。
(もっと読む)
形状測定用測定子の校正方法
【課題】被測定物を取り付けるための回転テーブルの中心位置に測定子の中心が届かなくても、その被測定物の形状を測定する測定子を、高精度に校正することができる形状測定用測定子の校正方法を提供する。
【解決手段】回転テーブル11上のワークの形状を測定する測定子22の校正方法において、校正用の基準円筒30を、軸間距離Lに位置するテーブル回転軸C周りに旋回可能に設け、測定子22の半径r、基準円筒30の半径R及び旋回角度αtに基づいて、測定子22の理論中心位置OL,ORを設定し、この理論中心位置OL,ORに位置決めした測定子22と、旋回角度αtに旋回させた基準円筒30とが接触する理論接触位置及び実接触位置を求め、これらの間の旋回角度誤差、軸間距離L、測定子22の半径r、基準円筒30の半径Rに基づいて求めた位置誤差に応じて、測定子22を校正する。
(もっと読む)
表面粗さ測定装置、及び、その測定待ち時間設定方法、並びに、測定待ち時間設定プログラム
【課題】測定開始時間を短縮化するとともに、測定範囲が狭い部位も測定可能とする表面粗さ測定装置を提供する。
【解決手段】まず、ピックアップ16で所定の試験片80を走査し変位の測定データを取得する。測定はピックアップ16の移動開始直後から実施する。次に測定により得られた変位の測定データを解析し、測定値が安定し始める点を測定値安定開始点として検出する。次に、ピックアップ16が測定値安定開始点に到達するまでに要する移動時間を求める。そして、求めた移動時間を測定待ち時間に設定する。
(もっと読む)
地表伸縮計測装置
【課題】計測結果の確認時に不用意に計測線にさわることなく、不要な警報の発生を抑制することができ、また、どのような設置環境においても計測結果を確認することのできる地表伸縮計測装置を提供する。
【解決手段】杭の移動量をワイヤ22及び計測線7を介して計測部にて計測する。作業者は、ボタン4,5,6を操作して計測結果を液晶表示部3に表示し確認する。そして、作業者がそれらのグラフ或いは計測値データ等の計測結果を確認する場合には、ボタン4,5,6を操作して、液晶表示部3の表示方向を180°回転する。
(もっと読む)
表面形状測定プローブおよびその校正方法
【課題】マスターボールによるスタイラス先端座標の校正を行うことができる表面形状測定プローブおよびその校正方法を提供すること。
【解決手段】表面形状測定プローブ30のスタイラス31の近傍に校正用接触子35を装着し、スタイラス31の先端と校正用接触子35とのオフセットOFSを測定し、校正用接触子35で三次元測定機の基準器であるマスターボール17を測定して校正用接触子35の座標位置を割り出し、校正用接触子35の座標位置にオフセットOFSを加算してスタイラス31の先端の座標位置を割り出す。
(もっと読む)
ボールねじ軸の累積リード誤差測定装置及び測定方法
【課題】再現性の高い高精度の測定を、短時間で行える生産性に優れたボールねじ軸の累積リード誤差測定装置及び測定方法を提供する。
【解決手段】被測定ボールねじ軸Wを回転不動に固定する固定支持台1と、前記被測定ボールねじ軸Wのねじ溝に当接させるボール接触子5と、ボール接触子5を被測定ボールねじ軸Wの軸心Lzに対し直交方向に往復移動させるとともにボール接触子5を所定の押し込み力で前記ねじ溝に当接させるボール接触子スライド手段と、ボール接触子スライド手段を軸心Lzと平行に水平往復移動する位置検出スライド手段と、位置検出スライド手段を前記被測定ボールねじ軸Wのねじ部間で往復移動させる位置決め往復スライド手段2と、ボール接触子5の軸心Lz方向における位置を検出するリード位置測定手段6と、を備える。
(もっと読む)
幾何誤差同定装置
【課題】ミス値を取得してしまったとしても、ミス値を用いることなく幾何誤差の同定を行うことにより、ミス値を用いることによる幾何誤差の同定精度の低下を防止することができる幾何誤差同定装置を提供する。
【解決手段】計測値(たとえばターゲット球の直径の計測値)と(S4)、設定値(予め設定されている直径)とを比較することにより(S5)、計測値が正しい計測値であるか否かを判断し、たとえミス値を取得したとしても当該ミス値を用いることなく、正しい計測にもとづく計測値のみを用いて幾何誤差の同定を行うため(S10)、幾何誤差の同定精度を従来と比較して向上することができる。
(もっと読む)
1 - 20 / 161
[ Back to top ]