
Fターム[2F062AA21]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 長さ、寸法 (723)
Fターム[2F062AA21]の下位に属するFターム
Fターム[2F062AA21]に分類される特許
1 - 20 / 179
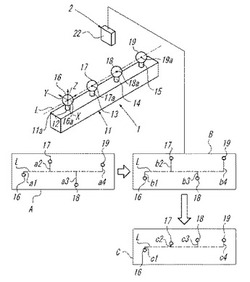
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
位置計測装置及び位置計測システム

【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
(もっと読む)
工作機械
【課題】工作機械において、プローブの取り付けられた主軸を回転させてワークの計測を行う際の主軸の回転微振動を抑制し、計測精度を向上させる。
【解決手段】タッチプローブ17の取り付けられる主軸30と、主軸30を回転駆動するモータ15と、モータ15の回転角度位置を検出する回転角度位置検出器16と、制御装置20とを含み、制御装置20は、タッチプローブ17によってワークの測定を行う測定モード指令が入力された際に、d軸電流指令補正部4によってd軸電流指令値Idcに1より小さいd軸電流補正係数Kを乗じてd軸電流指令値Idcをd軸電流指令補正値Idc‘に低減する。
(もっと読む)
ベンド管用測定治具
【課題】構造が簡単で、かつ、使い勝手に優れ、しかもベンド管の管芯長を正確に計測することのできるベンド管用測定治具を提供する。
【解決手段】ベンド管の管芯長を計測するためのベンド管用測定治具10であって、ベンド管の表面に載置可能な第1ブロックB1を備え、第1ブロックの下面2には、逆V字状に凹んだ溝部3が形成され、第1ブロックの上面4には、溝部の溝条方向と直交する方向における第1ブロックの上面の水平状態を測定する水平器5と、溝部の溝条位置と対向する位置で管芯長の測定治具を設置する基準部6と、が設けられ、溝部、水平器及び基準部を備えた第1ブロックと同様に構成された第2ブロックB2と、第1ブロックの溝部の溝条方向と第2ブロックの溝部の溝条方向とが同一軸心上を移動するように、第1ブロックおよび第2ブロックの少なくとも一方を移動自在に保持するガイド部材7a,7bと、を備えている。
(もっと読む)
眼鏡枠形状測定装置
【課題】装置のカバー等に型板ホルダー収納場所を設けなくても、型板ホルダーの使い勝手の良い眼鏡枠形状測定装置を提供する。
【解決手段】眼鏡フレームの左右のリムの左右方向に対して眼鏡フレーム装用時の縦方向から左右のリムを押圧して眼鏡フレームを保持する第1スライダー102及び第2スライダー103を有する眼鏡フレーム保持ユニット100と、型板又デモレンズの測定対象物が取り付けられる型板ホルダーと、型板ホルダーに取り付けられた測定対象物のエッジに接触する測定軸を持ち、測定軸の動径方向の移動を検知して測定対象物の動径情報を得る型板測定ユニットと、を備える眼鏡枠形状測定装置において、型板ホルダーの非使用時に前記型板ホルダーを収納するための収納部を前記第1スライダー102又は第2スライダー103に設けた。
(もっと読む)
被較正疑似品
【課題】関節プローブヘッドを較正するための被較正疑似品を提供する。
【解決手段】座標位置決め機械のアームに関節プローブヘッドが取り付けられたときに前記関節プローブヘッドを較正するための被較正疑似品100であって、前記関節プローブヘッドを前記座標位置決め機械の前記アームに対し関節動作させることによりスキャンされることが可能な、異なる寸法の複数の輪郭102、104、106と、前記複数の輪郭102、104、106を、前記座標位置決め機械の異なる方向に沿って向けることができるよう、前記複数の輪郭102、104、106の向きを変えるための割り出し装置と、を備える被較正疑似品100。
(もっと読む)
測定プローブ
【課題】プローブの接触要素に作用する力に対して非常に敏感であって、プローブに対する損傷を妨げるために、適度に頑丈であるプローブを提供する。
【解決手段】位置決定装置用のプローブは、プローブ本体18および加工対象物に接触するスタイラス14を有する。ひずみ感受性構造体は、プローブ本体18およびスタイラス14を接続し、そして、曲げられる部材30を含む。曲げられる部材30は、例えば長方形の横断面を有する。曲げられる部材30の曲げに基づく信号を提供するように、一対のひずみ検出要素33が曲げられる部材の反対側に位置する側部に取り付けられる。これは、ひずみ感受性構造体に、頑丈さと、曲げに対して感度が良いことの両方を可能にする。
(もっと読む)
管の変形検査具
【課題】管の端部の歪みを全周に亘って簡単に確認できる検査具を提供すること。
【解決手段】芯出し部材2と、芯出し部材の中心側に回転軸4を介して旋回可能に取り付けた枝部材3とを備えて、芯出し部材2の両端側に回転軸4と平行に突出する掛け部22,22’を設け、その各掛け部に、芯出し部材を管Pの端部に固定する把持片を芯出し部材の長手方向に進退可能に取り付け、芯出し部材2の両端側と枝部材3の先端側に、回転軸4からの距離を表示する目印を取り付けた。
これにより、検査具1の回転軸4を管の軸心に合わせて、枝部材3を管Pの端部に沿って管の軸心周りに真円を描くように旋回させることができるから、枝部材3の先端側に付けた目印の軌跡と管外面との管径方向の距離を確認して、管の全周に亘って管の歪みを確認することができる。
(もっと読む)
内径計測装置およびその方法
【課題】管状の被計測物の内径を容易に計測することができる内径計測装置およびその方法を提供する。
【解決手段】被計測物2の中空部分に挿入される円筒形の測定棒11と、測定棒11の周方向に互いにほぼ等間隔かつ軸方向にほぼ等しい位置に測定棒11表面に対してほぼ垂直に設けられ、伸縮自在である複数の伸縮棒12と、測定棒11とほぼ同軸上に設けられ、被計測物2に対して直接または間接的に固定され測定棒11を被計測物2に対して平行に支持する支持体13とを有する。測定棒11表面から被計測物2の内面に接触する各伸縮棒12の先端までの長さと、測定棒11の直径とに基づいて、伸縮棒12の先端位置に対する外接円の直径を求め、外接円の直径から被計測物2の内径を求める。
(もっと読む)
幾何誤差同定装置
【課題】ミス値を取得してしまったとしても、ミス値を用いることなく幾何誤差の同定を行うことにより、ミス値を用いることによる幾何誤差の同定精度の低下を防止することができる幾何誤差同定装置を提供する。
【解決手段】計測値(たとえばターゲット球の直径の計測値)と(S4)、設定値(予め設定されている直径)とを比較することにより(S5)、計測値が正しい計測値であるか否かを判断し、たとえミス値を取得したとしても当該ミス値を用いることなく、正しい計測にもとづく計測値のみを用いて幾何誤差の同定を行うため(S10)、幾何誤差の同定精度を従来と比較して向上することができる。
(もっと読む)
靴製作用の測定キット
【課題】第1に、専門的知識を有さない対象者を対象として正確な足に関するデータを採取可能となり、第2に、簡単容易に実現され、第3に、個々の足の形状に合った靴の通信販売等が実現され、第4に、低コストで実現される、靴製作用の測定キットを提案する。
【解決手段】この靴製作用の測定キット1は、足型取り器2と測定器3とを別体で備えている。足型取り器2は、弾性を有しない可変材4を備え、足を載せることによって圧縮荷重を受け、塑性変形に基づき表面に少なくとも足の足裏面に対応した凹凸を形成可能である。測定器3は、少なくとも足外形よりも若干前側に伸びた形状を備えており足が載せられる基板5と、基板5の後部外周に付設され足の踵を囲んで保持可能な踵止め6と、基板5の前部表面に表示され足の足長サイズの測定に用いる目盛表示7と、基板5の中央部に設けられ少なくとも足の表面の高さ周りデータを採取可能なメジャー8とを有している。
(もっと読む)
接触式変位測定器
【課題】プローブ部材の摺動部に滑り軸受けを用いた接触式変位測定器において、プローブ部材伸縮時の蛇腹ブーツ内の空気の移動をスムーズにして測定値バラツキを防止する。
【解決手段】測定対象物に当接して変位可能な接触子4と、前記接触子4と接続し滑り軸受構造により変位するプローブ部材8と、前記接触子4及び前記プローブ部材8の間に設けられた蛇腹部6と、前記プローブ部材8の変位に対応した出力を行う差動トランス14,16を有する接触式変位測定ヘッド1を備えた接触式変位測定器であって、前記プローブ部材8の変位に伴って前記蛇腹部6が伸縮する時の前記蛇腹部6内の空気を逃がす通路18を前記プローブ部材8の内部に設けた。
(もっと読む)
フレア加工寸法測定用治具
【課題】フレア加工寸法測定用治具において、フレア加工により形成されたフレア部の開口端の外径が規定の寸法であるか否かを容易に測定することができるようにする。
【解決手段】フレア加工寸法測定用治具10は、冷媒銅管12の筒部14に嵌り合う筒部嵌合部24と、筒部嵌合部24に接続され、冷媒銅管12のフレア部16に対応するように形成され、このフレア部16に面接触するフレア部接触部28とを有する。フレア部16に面接触するフレア部接触部28の表面は、規格のA寸法を有するフレア部16の開口端18が接触する領域と、そのA寸法より小さい寸法を有するフレア部16の開口端18が接触する領域とが、目視により識別可能に形成されている。この構成により、冷媒銅管12のフレア部16に治具10を装着するだけで、フレア加工寸法が規定のA寸法内であるか否かを、容易に測定することができる。
(もっと読む)
タービンブレード測定装置
【課題】タービンブレードの測定装置を提供すること。
【解決手段】測定装置は、ブレードに沿って複数の所定位置にてタービンエンジンの圧縮機ブレード又はタービンブレードの1以上の態様を測定することができる。測定装置は、タービンエンジンの圧縮機ブレード又はタービンブレードの第1の列が位置する限定スペース内に測定装置の個々の要素を移動させることができるように、分解可能である。次いで、要素は、このスペース内で再組み立てされ、ブレードについての測定値が収集できるようにタービンブレードに取り付けることができる。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
測定装置
【課題】被測定物を比較的高い精度で簡易に測定でき、製造コストの低減も期し得る測定装置を提供する。
【解決手段】被測定物7を載置するテーブル9が、その中心Aを通る軸線回りに回転できる。テーブル9の前方側に、左右方向で移動する測定器17を有する。測定器17は、前後方向で進退する測定子19を具え、後退状態にある測定子19の先端の接触点20とテーブルの中心Aを通る左右方向の直線との間の距離が所要値に設定されている。測定器17は、左右方向で見た一端側位置22と他端側位置25で、被測定物7の前面12に向けて進行し、後退状態の接触点と被測定物の前面12との間の第1距離D1、第2距離D2を測定する。第1距離D1と第2距離D2が相違する場合は、一端側位置22と他端側位置25における、接触点20と前面12との間の距離が等しくなるようにテーブル9が回転する。
(もっと読む)
ワーク寸法計測装置及びワーク寸法計測方法
【課題】計測精度の向上を実現したうえで、寸法計測から計測後の検査記録作成までの作業コストの低減及び作業時間の短縮を実現でき、平坦度や捻れ等の三次元データをも得ることが可能であるワーク寸法計測装置及びワーク寸法計測方法を提供する。
【解決手段】セグメントWの寸法を計測するワーク寸法計測装置1であって、多関節アーム12を具備して、アーム12の先端に有する探触子11をセグメントWに接触させることで三次元座標値を得る複数の測定機10と、複数の測定機10の相対位置関係を校正する作業及び該複数の測定機10で得られた各三次元座標値に基づいてセグメントWの寸法を自動算出する作業を行う校正演算手段21と、校正演算手段21からの校正結果及び演算結果に基づいてセグメントWの寸法計測結果を評価する計測評価手段22と、計測評価手段22からの計測結果を検査記録にまとめて出力するデータ管理手段31を備えている。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
ワイヤーたわみ測定装置
【課題】通行支障にならない限定箇所で、微細な荷重変位を正確に測定する、簡単で安価な構成の装置、及びそれを用いて行う劣化コンクリート日常点検方法を提供する。
【解決手段】被測定物側に動滑車を配置し測定装置側に定滑車を配置する、荷重付加時のたわみ量H2は、張設ワイヤーにSL2として表現される。この微量の長さを、滑車を用いて増幅し測定装置側面の点検窓に、その箇所の構造物崩壊推定危険度として、青、黄、赤に数値を併記した図柄で表される。
(もっと読む)
テンションバランサの伸縮量指示装置
【課題】 シリンダに対するピストンロッドの相対変位によるテンションバランサの伸縮長さを示すインジケータによる読取りを確実にする。
【解決手段】 伸縮長さ指示装置8を、シリンダの軸線方向に目盛り13aを備えた目盛り表示部13と、ロッド5の一端に固定し、ロッド5と共にカバー7の外側を移動して目盛り13aを指し示すインジケータ14と、インジケータ14をホルダ2の下部に支持する支持ローラ15と、インジケータ14を間に挟むように両側に回転自在に設けられたガイドローラ16とで構成する。目盛り表示部13は、外筒部材3を収容するケースの両側面下部7bに設ける。支持ローラ15はインジケータ14をホルダ2との間に保持して転動自在とする。ガイドローラ16は、ホルダ2にシリンダの軸線直交方向の垂直軸周りに回転自在に設ける。
(もっと読む)
1 - 20 / 179
[ Back to top ]